







首先说明一下随机算法(RANSAC):
RANSAC算法:是使用一个比较小的数据集,然后再尽可能的使用一致的数据来扩大原来初始化的数据集。
简单的说就是:我们要要拟合一段二维点中的弧线,RANSAC会选择三个点作为一个集合,然后计算中心和半径,也就是说这样圆的弧线就基本确定了。
源代码如下:
#include<iostream>
#include<pcl/filters/extract_indices.h>
#include<pcl/io/pcd_io.h>
#include<pcl/point_types.h>
#include<pcl/sample_consensus/ransac.h>
#include<pcl/sample_consensus/sac_model_plane.h>
#include<pcl/sample_consensus/sac_model_sphere.h>
#include<pcl/visualization/pcl_visualizer.h>
#include<boost/thread/thread.hpp>
#include<pcl/console/parse.h>
boost::shared_ptr < pcl::visualization::PCLVisualizer>
simpleVis(pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud)
{
//打开3D窗口并添加点云
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(0, 0, 0);
viewer->addPointCloud<pcl::PointXYZ>(cloud, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");
viewer->initCameraParameters();
return (viewer);
}
int main(int argc, char ** argv)
{
srand(time(NULL));
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr final(new pcl::PointCloud<pcl::PointXYZ>);
cloud->width = 5000;
cloud->height = 1;
cloud->is_dense = false;
cloud->points.resize(cloud->width * cloud->height);
for (size_t i = 0; i < cloud->points.size(); ++i)
{
if (pcl::console::find_argument(argc, argv, "-s") >= 0 || pcl::console::find_argument(argc, argv, "-sf") >= 0)
{
cloud->points[i].x = rand() / (RAND_MAX + 1.0);
cloud->points[i].y = rand() / (RAND_MAX + 1.0);
if (i % 5 == 0)
cloud->points[i].z = rand() / (RAND_MAX + 1.0);
else if (i % 2 == 0)
cloud->points[i].z = sqrt(1 - (cloud->points[i].x * cloud->points[i].x)
- (cloud->points[i].y * cloud->points[i].y));
else
cloud->points[i].z = -sqrt(1 - (cloud->points[i].x * cloud->points[i].x)
- (cloud->points[i].y * cloud->points[i].y));
}
else
{
cloud->points[i].x = rand() / (RAND_MAX + 1.0);
cloud->points[i].y = rand() / (RAND_MAX + 1.0);
if (i % 5 == 0)
cloud->points[i].z = rand() / (RAND_MAX + 1.0);
else
cloud->points[i].z = -1 * (cloud->points[i].x + cloud->points[i].y);
}
}
std::vector<int> inliers;
//创建对象和模拟计算随机抽样一致性
pcl::SampleConsensusModelSphere<pcl::PointXYZ>::Ptr
model_s(new pcl::SampleConsensusModelSphere<pcl::PointXYZ>(cloud));
pcl::SampleConsensusModelPlane<pcl::PointXYZ>::Ptr
model_p(new pcl::SampleConsensusModelPlane<pcl::PointXYZ>(cloud));
if (pcl::console::find_argument(argc, argv, "-f") >= 0)
{
pcl::RandomSampleConsensus<pcl::PointXYZ> ransac(model_p);
ransac.setDistanceThreshold(.01);
ransac.computeModel();
ransac.getInliers(inliers);
}
else if (pcl::console::find_argument(argc, argv, "-sf") >= 0)
{
pcl::RandomSampleConsensus<pcl::PointXYZ> ransac(model_s);
ransac.setDistanceThreshold(.01);
ransac.computeModel();
ransac.getInliers(inliers);
}
pcl::copyPointCloud<pcl::PointXYZ>(*cloud, inliers, *final);
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer;
if (pcl::console::find_argument(argc, argv, "-f") >= 0 || pcl::console::find_argument(argc, argv, "-sf") >= 0)
viewer = simpleVis(final);
else
viewer = simpleVis(cloud);
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
return 0;
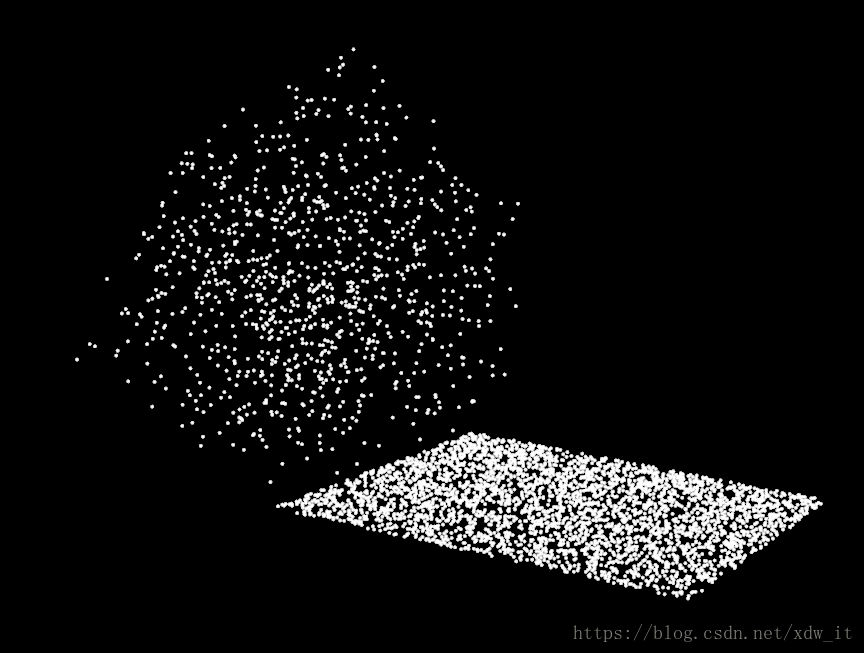
}实验结果














 101
101











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









