






文章仅作学习记录使用
空间解析几何
四、空间解析几何(高数)
1.向量代数
既有大小又有方向的量称为向量。
设a
=
(
a
x
,
a
y
,
a
z
)
=(a_x,a_y,a_z)
=(ax,ay,az),b
=
(
b
x
,
b
y
,
b
z
)
=(b_x,b_y,b_z)
=(bx,by,bz),c
=
(
c
x
,
c
y
,
c
z
)
=(c_x,c_y,c_z)
=(cx,cy,cz),a,b,c均不是零向量。
数学上研究的是自由向量,其特点是与起点无关,简称为大家所熟悉的“向量”。
方向角与方向余弦
非零向量
a
\bm a
a与三条坐标轴的夹角
α
,
β
,
γ
\alpha,\beta,\gamma
α,β,γ称为
r
\bm r
r的方向角。设
a
=
(
x
,
y
,
z
)
\bm a=(x,y,z)
a=(x,y,z)则,
cos
α
=
x
∣
a
∣
,
cos
β
=
y
∣
a
∣
,
cos
γ
=
z
∣
a
∣
cos
α
2
+
cos
β
2
+
cos
γ
2
=
1
(
cos
α
,
cos
β
,
cos
γ
)
=
a
⃗
∣
a
⃗
∣
=
a
0
\cos \alpha=\frac{x}{|\bm a|},\cos \beta=\frac{y}{|\bm a|},\cos \gamma=\frac{z}{|\bm a|}\\[2ex] \cos \alpha^{2}+\cos \beta^{2}+\cos \gamma^{2}=1\\[2ex] (\cos \alpha,\cos \beta,\cos \gamma)=\frac{\vec{a}}{|\vec{a}|}=\bm{a^{0}}
cosα=∣a∣x,cosβ=∣a∣y,cosγ=∣a∣zcosα2+cosβ2+cosγ2=1(cosα,cosβ,cosγ)=∣a∣a=a0
a
0
\bm{a^0}
a0即表示与
a
⃗
\vec{a}
a同方向的单位向量。
(1)数量积
a
⋅
b
=
(
a
x
,
a
y
,
a
z
)
⋅
(
b
x
,
b
y
,
b
z
)
=
a
x
b
x
+
a
y
b
y
+
a
z
b
z
(4.1)
\bm a\cdot\bm b=(a_x,a_y,a_z)\cdot (b_x,b_y,b_z)=a_xb_x+a_yb_y+a_zb_z\tag{4.1}
a⋅b=(ax,ay,az)⋅(bx,by,bz)=axbx+ayby+azbz(4.1)
a
⋅
b
=
∣
a
∣
∣
b
∣
cos
θ
=
a
⋅
b
∣
a
⃗
∣
∣
b
⃗
∣
=
a
x
b
x
+
a
y
b
y
+
a
z
b
z
a
x
2
+
a
y
2
+
a
z
2
+
b
x
2
+
b
y
2
+
b
z
2
(4.2)
\bm a\cdot\bm b=|\bm a||\bm b|\cos \theta=\frac{\bm a \cdot \bm b}{|\vec a||\vec b|}=\frac{a_xb_x+a_yb_y+a_zb_z}{\sqrt{a^2_x+a^2_y+a^2_z}+\sqrt{b^2_x+b^2_y+b^2_z}}\tag{4.2}
a⋅b=∣a∣∣b∣cosθ=∣a∣∣b∣a⋅b=ax2+ay2+az2+bx2+by2+bz2axbx+ayby+azbz(4.2)公式4.2为数量积的定义式,
θ
\theta
θ为
a
,
b
\bm{a,b}
a,b的夹角。
垂直
a
⋅
b
=
0
\quad a\cdot b=0
a⋅b=0
a
⊥
b
⇔
θ
=
π
2
⇔
∣
a
⃗
∣
∣
b
⃗
∣
cos
θ
=
0
⇔
a
x
b
x
+
a
y
b
y
+
a
z
b
z
=
0
(4.3)
\quad\bm a\perp \bm b \Leftrightarrow \theta=\frac{\pi}{2}\Leftrightarrow|\vec a||\vec b|\cos \theta=0\Leftrightarrow a_xb_x+a_yb_y+a_zb_z=0\tag{4.3}
a⊥b⇔θ=2π⇔∣a∣∣b∣cosθ=0⇔axbx+ayby+azbz=0(4.3)
投影
P
r
j
b
a
=
a
⃗
⋅
b
⃗
∣
b
⃗
∣
=
a
⃗
⋅
b
⃗
∣
a
⃗
∣
∣
b
⃗
∣
=
a
x
b
x
+
a
y
b
y
+
a
z
b
z
b
x
2
+
b
y
2
+
b
z
2
(4.4)
Prj_ba=\frac{\vec a \cdot \vec b}{|\vec b|}=\frac{\vec a \cdot \vec b}{|\vec a||\vec b|}=\frac{a_xb_x+a_yb_y+a_zb_z}{\sqrt{b^2_x+b^2_y+b^2_z}}\tag{4.4}
Prjba=∣b∣a⋅b=∣a∣∣b∣a⋅b=bx2+by2+bz2axbx+ayby+azbz(4.4)称为a在b上的投影。
(2)向量积
a × b = ( i j k a x a y a z b x b y b z ) (4.5) \bm{a}\times \bm{b}=\left(\begin{matrix} \bf{i} & \bf{j} & \bf{k} \\a_x & a_y & a_z \\b_x & b_y & b_z \end{matrix}\right)\tag{4.5} a×b= iaxbxjaybykazbz (4.5)其中 ∣ a × b ∣ = ∣ a ∣ ∣ b ∣ sin θ |\bm{a}\times\bm{b}|=|\bm{a}||\bm{b}|\sin \theta ∣a×b∣=∣a∣∣b∣sinθ,用右手规则确定方向(转向角不超过 π \pi π), θ \theta θ为 a , b \bm{a,b} a,b的夹角。
平行 a × b = 0 \quad\bm{a}\times\bm{b}=0 a×b=0
a / / b ⇔ θ = 0 或 π ⇔ a x b x = a y b y = a z b z \bm{a}//\bm{b}\Leftrightarrow\theta=0或\pi \Leftrightarrow \frac{a_x}{b_x}=\frac{a_y}{b_y}=\frac{a_z}{b_z} a//b⇔θ=0或π⇔bxax=byay=bzaz
(3)混合积
①公式:
[
a
b
c
]
=
(
a
×
b
)
⋅
c
=
∣
a
x
a
y
a
z
b
x
b
y
b
z
c
x
c
y
c
z
∣
[\bold{abc}]=(\bold{a}\times\bold{b})\cdot\bold{c}=\left| \begin{array}{} a_x & a_y & a_z \\ b_x & b_y & b_z \\ c_x & c_y & c_z \end{array}\right|
[abc]=(a×b)⋅c=
axbxcxaybycyazbzcz
②三向量共面
⟺
∣
a
x
a
y
a
z
b
x
b
y
b
z
c
x
c
y
c
z
∣
=
0
\Longleftrightarrow\left| \begin{array}{} a_x & a_y & a_z \\ b_x & b_y & b_z \\ c_x & c_y & c_z \end{array}\right|=0
⟺
axbxcxaybycyazbzcz
=0
③根据行列式性质2
互换行列式的两行(或列),行列式变号。
3个向量进行混合积运算,其行列式的三行即为3个向量的坐标(x,y,z),不同只在于3个向量所在位置不同,换行两次即可实现完全相同,故可以推断出以下公式:
(
a
×
b
)
⋅
c
=
(
b
×
c
)
⋅
a
(\bold{a}\times\bold{b})\cdot\bold{c}=(\bold{b}\times\bold{c})\cdot\bold{a}
(a×b)⋅c=(b×c)⋅a
同样的还有:
(
c
×
a
)
⋅
b
=
(
a
×
b
)
⋅
c
(\bold{c}\times\bold{a})\cdot\bold{b}=(\bold{a}\times\bold{b})\cdot\bold{c}
(c×a)⋅b=(a×b)⋅c
(4)向量的方向角和方向余弦
(1) a ⃗ \vec{a} a与x轴、y轴、z轴的正向的夹角 α 、 β 、 γ \alpha 、\beta、\gamma α、β、γ称为 a ⃗ \vec{a} a的方向角。
(2) cos α 、 cos β 、 cos γ \cos \alpha 、\cos \beta 、\cos \gamma cosα、cosβ、cosγ称为 a ⃗ \vec{a} a的方向余弦,且 cos α = a x a , cos β = a y a , cos γ = a z a \cos \alpha=\frac{a_x}{\bm{a}},\cos \beta =\frac{a_y}{\bm{a}},\cos \gamma=\frac{a_z}{\bm{a}} cosα=aax,cosβ=aay,cosγ=aaz。
(3) a 0 = a ∣ a ∣ = ( cos α , cos β , cos γ ) \bm{a}^0=\frac{\bm{a}}{|\bm{a}|}=(\cos \alpha ,\cos \beta,\cos \gamma) a0=∣a∣a=(cosα,cosβ,cosγ)称为向量 a ⃗ \vec{a} a的单位向量(表示方向的向量)。
(4)任意向量 r = x i + y j + z k = ( r cos α , r cos β , r cos γ ) = r ( cos α , cos β , cos γ ) \bm{r}=x\bm{i}+y\bm{j}+z\bm{k}=(r\cos \alpha ,r\cos \beta,r\cos \gamma)=r(\cos \alpha ,\cos \beta,\cos \gamma) r=xi+yj+zk=(rcosα,rcosβ,rcosγ)=r(cosα,cosβ,cosγ),其中 cos α , cos β , cos γ \displaystyle \cos \alpha ,\cos \beta,\cos \gamma cosα,cosβ,cosγ为 r \bm{r} r的方向余弦,r为 r \bm{r} r的模, cos α = x x 2 + y 2 + z 2 , cos β = y x 2 + y 2 + z 2 , cos γ = z x 2 + y 2 + z 2 , r = x 2 + y 2 + z 2 \cos \alpha =\frac{x}{\sqrt{x^2+y^2+z^2}},\cos \beta=\frac{y}{\sqrt{x^2+y^2+z^2}},\cos \gamma=\frac{z}{\sqrt{x^2+y^2+z^2}},\bm{r}=\sqrt{x^2+y^2+z^2} cosα=x2+y2+z2x,cosβ=x2+y2+z2y,cosγ=x2+y2+z2z,r=x2+y2+z2。
2.空间平面与直线
(1)平面方程
以下假设平面的法向量
n
=
(
A
,
B
,
C
)
\bm{n}=(A,B,C)
n=(A,B,C),平面的方程为以下四种:
①一般式:
A
x
+
B
y
+
C
z
+
D
=
0
Ax+By+Cz+D=0
Ax+By+Cz+D=0
②点法式: A ( x − x 0 ) + B ( y − y 0 ) + C ( z − z 0 ) = 0 \displaystyle A(x-x_0)+B(y-y_0)+C(z-z_0)=0 A(x−x0)+B(y−y0)+C(z−z0)=0
③三点式: ∣ x − x 1 y − y 1 z − z 1 x − x 2 y − y 2 z − z 2 x − x 3 y − y 3 z − z 3 ∣ = 0 \left|\begin{array}{} x-x_1 & y-y_1 &z-z_1\\ x-x_2 & y-y_2 &z-z_2\\ x-x_3 & y-y_3 &z-z_3 \end{array}\right|=0 x−x1x−x2x−x3y−y1y−y2y−y3z−z1z−z2z−z3 =0(平面过不共线的三点 P ( x i , y i , z i ) , i = 1 , 2 , 3 \bm{P}(x_i,y_i,z_i),i=1,2,3 P(xi,yi,zi),i=1,2,3)
注释:设 P ( x , y , z ) P(x,y,z) P(x,y,z)为平面 π \pi π上任一点,则 P P 1 → , P P 2 → , P P 3 → , \overrightarrow{PP_1},\overrightarrow{PP_2},\overrightarrow{PP_3}, PP1,PP2,PP3,三个向量共面,则其混合积 ( P P 1 → × P P 2 → ) ⋅ P P 3 → = 0 , (\overrightarrow{PP_1}\times\overrightarrow{PP_2})\cdot\overrightarrow{PP_3}=0, (PP1×PP2)⋅PP3=0,可得三点式平面方程。
④截距式: x a + y b + z c = 1 \displaystyle\frac{x}{a}+\frac{y}{b}+\frac{z}{c}=1 ax+by+cz=1(平面过 ( a , 0 , 0 ) , ( 0 , b , 0 ) , ( 0 , 0 , c ) (a,0,0),(0,b,0),(0,0,c) (a,0,0),(0,b,0),(0,0,c)三点)
⑤平面族方程
通过直线
l
:
{
A
1
x
+
B
1
y
+
C
1
z
+
D
1
=
0
,
A
2
x
+
B
2
y
+
C
2
z
+
D
2
=
0
l:\begin{cases} A_1x+B_1y+C_1z+D_1=0,\\ A_2x+B_2y+C_2z+D_2=0 \end{cases}
l:{A1x+B1y+C1z+D1=0,A2x+B2y+C2z+D2=0的平面族方程为
A
1
x
+
B
1
y
+
C
1
z
+
D
1
+
λ
(
A
2
x
+
B
2
y
+
C
2
z
+
D
2
)
=
0
A_1x+B_1y+C_1z+D_1+\lambda(A_2x+B_2y+C_2z+D_2)=0
A1x+B1y+C1z+D1+λ(A2x+B2y+C2z+D2)=0其中平面
A
2
x
+
B
2
y
+
C
2
z
+
D
2
=
0
A_2x+B_2y+C_2z+D_2=0
A2x+B2y+C2z+D2=0不在平面族方程内。
(2)直线方程
以下假设直线的方向向量 τ = ( l , m , n ) \tau=(l,m,n) τ=(l,m,n)。
①一般式:
{
A
1
x
+
B
1
y
+
C
1
z
+
D
1
=
0
,
n
1
=
(
A
1
,
B
1
,
C
1
)
,
A
2
x
+
B
2
y
+
C
2
z
+
D
2
=
0
,
n
2
=
(
A
2
,
B
2
,
C
2
)
,
\begin{cases} A_1x+B_1y+C_1z+D_1=0,\bm{n}_1=(A_1,B_1,C_1),\\ A_2x+B_2y+C_2z+D_2=0,\bm{n}_2=(A_2,B_2,C_2), \end{cases}
{A1x+B1y+C1z+D1=0,n1=(A1,B1,C1),A2x+B2y+C2z+D2=0,n2=(A2,B2,C2),其中
n
1
\bm{n}_1
n1不平行于
n
2
\bm{n}_2
n2。
(一般式是由两个平面相交产生的直线,两个等式分别对应两个平面公式)
②点向式: x − x 0 l = y − y 0 m = z − z 0 n \displaystyle\frac{x-x_0}{l}=\frac{y-y_0}{m}=\frac{z-z_0}{n} lx−x0=my−y0=nz−z0
③参数式: { x = x 0 + l t y = y 0 + m t z = z 0 + n t \displaystyle\begin{cases} x=x_0+lt\\ y=y_0+mt\\ z=z_0+nt \end{cases} ⎩ ⎨ ⎧x=x0+lty=y0+mtz=z0+nt, M ( x 0 , y 0 , z 0 ) M(x_0,y_0,z_0) M(x0,y0,z0)为直线上的已知点, t t t为参数。
④两点式: x − x 1 x 2 − x 1 = y − y 1 y 2 − y 1 = z − z 1 z 2 − z 1 \displaystyle\frac{x-x_1}{x_2-x_1}=\frac{y-y_1}{y_2-y_1}=\frac{z-z_1}{z_2-z_1} x2−x1x−x1=y2−y1y−y1=z2−z1z−z1(直线过不同的两点 P i ( x i , y i , z i ) , i = 1 , 2 \bm P_i(x_i,y_i,z_i),i=1,2 Pi(xi,yi,zi),i=1,2)
(3)位置关系
距离
点
P
\bm P
P到平面
A
x
+
B
y
+
C
z
+
D
=
0
Ax+By+Cz+D=0
Ax+By+Cz+D=0的距离
d
=
∣
A
x
0
+
B
y
0
+
C
z
0
+
D
∣
A
2
+
B
2
+
C
2
\displaystyle d=\frac{|Ax_0+By_0+Cz_0+D|}{\sqrt{A^2+B^2+C^2}}
d=A2+B2+C2∣Ax0+By0+Cz0+D∣。
直线间的关系
设
τ
1
=
(
l
1
,
m
1
,
n
1
)
,
τ
2
=
(
l
2
,
m
2
,
n
2
)
\tau_1=(l_1,m_1,n_1),\tau_2=(l_2,m_2,n_2)
τ1=(l1,m1,n1),τ2=(l2,m2,n2)分别为直线
L
1
,
L
2
L_1,L_2
L1,L2的方向向量。
垂直: L 1 ⊥ L 2 ⇔ τ 1 ⊥ τ 2 ⇔ l 1 l 2 + m 1 m 2 + n 1 n 2 = 0 平行: L 1 ∥ L 2 ⇔ τ 1 ∥ τ 2 ⇔ l 1 l 2 = m 1 m 2 = n 1 n 2 \displaystyle 垂直:L_1\perp L_2\Leftrightarrow \tau_1 \perp \tau_2 \Leftrightarrow l_1l_2+m_1m_2+n_1n_2=0\\[2ex] 平行:L_1\parallel L_2\Leftrightarrow \tau_1 \parallel \tau_2 \Leftrightarrow\frac{l_1}{l_2}= \frac{m_1}{m_2}= \frac{n_1}{n_2} 垂直:L1⊥L2⇔τ1⊥τ2⇔l1l2+m1m2+n1n2=0平行:L1∥L2⇔τ1∥τ2⇔l2l1=m2m1=n2n1
平面间的关系
设平面
π
1
,
π
2
\pi_1,\pi_2
π1,π2的法向量分别为
n
1
=
(
A
1
,
B
1
,
C
1
)
,
n
2
=
(
A
2
,
B
2
,
C
2
)
\bm n_1=(A_1,B_1,C_1),\bm n_2=(A_2,B_2,C_2)
n1=(A1,B1,C1),n2=(A2,B2,C2)
垂直: π 1 ⊥ π 2 ⇔ n 1 ⊥ n 2 ⇔ A 1 A 2 + B 1 B 2 + C 1 C 2 = 0 平行: π 1 ∥ π 2 ⇔ n 1 ∥ n 2 ⇔ A 1 A 2 = B 1 B 2 = C 1 C 2 \displaystyle垂直:\pi_1\perp \pi_2\Leftrightarrow \bm n_1 \perp \bm n_2 \Leftrightarrow A_1A_2+B_1B_2+C_1C_2=0\\[2ex] 平行:\pi_1\parallel \pi_2\Leftrightarrow \bm n_1 \parallel \bm n_2 \Leftrightarrow\frac{A_1}{A_2}= \frac{B_1}{B_2}= \frac{C_1}{C_2} 垂直:π1⊥π2⇔n1⊥n2⇔A1A2+B1B2+C1C2=0平行:π1∥π2⇔n1∥n2⇔A2A1=B2B1=C2C1
平面与直线的关系
设直线
L
L
L的方向向量为
τ
=
(
l
,
m
,
n
)
\tau=(l,m,n)
τ=(l,m,n),平面的法向量为
n
=
(
A
,
B
,
C
)
\bm n=(A,B,C)
n=(A,B,C)
垂直: L ⊥ π ⇔ τ ∥ n ⇔ A l = B m = C n 平行: L ∥ π ⇔ τ ⊥ n ⇔ A l + B m + C n = 0 \displaystyle 垂直:L\perp \pi\Leftrightarrow \tau \parallel \bm n \Leftrightarrow \frac{A}{l}= \frac{B}{m}= \frac{C}{n}\\[2ex] 平行:L\parallel \pi \Leftrightarrow \tau \perp\bm n \Leftrightarrow Al+Bm+Cn=0 垂直:L⊥π⇔τ∥n⇔lA=mB=nC平行:L∥π⇔τ⊥n⇔Al+Bm+Cn=0
线线①、面面②的位置公式一一对应,而线面③的位置公式互相反转,仅记住相反的③即可。 \color{#8B8989}{线线①、面面②的位置公式一一对应,而线面③的位置公式互相反转,仅记住相反的③即可。} 线线①、面面②的位置公式一一对应,而线面③的位置公式互相反转,仅记住相反的③即可。
3.空间曲线与曲面
(1)空间曲线
①一般式: Γ : { F ( x , y , z ) = 0 G ( x , y , z ) = 0 \Gamma :\begin{cases} F(x,y,z)=0\\ G(x,y,z)=0 \end{cases} Γ:{F(x,y,z)=0G(x,y,z)=0其几何背景为两个曲面的交线。
②参数方程: Γ : { x = φ ( t ) , y = ψ ( t ) , z = ω ( t ) , t ∈ [ α , β ] \Gamma :\begin{cases} x=\varphi(t),\\ y=\psi(t),\\ z=\omega(t), \end{cases}t\in[\alpha,\beta] Γ:⎩ ⎨ ⎧x=φ(t),y=ψ(t),z=ω(t),t∈[α,β]
③空间曲线在坐标面上的投影
以求曲线
Γ
\Gamma
Γ在平面上的投影曲线为例:
将
Γ
:
{
F
(
x
,
y
,
z
)
=
0
G
(
x
,
y
,
z
)
=
0
\Gamma: \begin{cases} F(x,y,z)=0\\ G(x,y,z)=0 \end{cases}
Γ:{F(x,y,z)=0G(x,y,z)=0中的
z
z
z消去,得到
φ
(
x
,
y
)
=
0
\varphi(x,y)=0
φ(x,y)=0,
则曲线
Γ
\Gamma
Γ在
x
O
y
xOy
xOy面上的投影曲线包含于曲线
{
φ
(
x
,
y
)
=
0.
z
=
0.
\begin{cases} \varphi (x,y)=0.\\ z=0. \end{cases}
{φ(x,y)=0.z=0.
曲线 Γ \Gamma Γ在其他平面上的投影曲线可类似求得。
(2)空间曲面
(1)曲面方程:
F
(
x
,
y
,
z
)
=
0
F(x,y,z)=0
F(x,y,z)=0
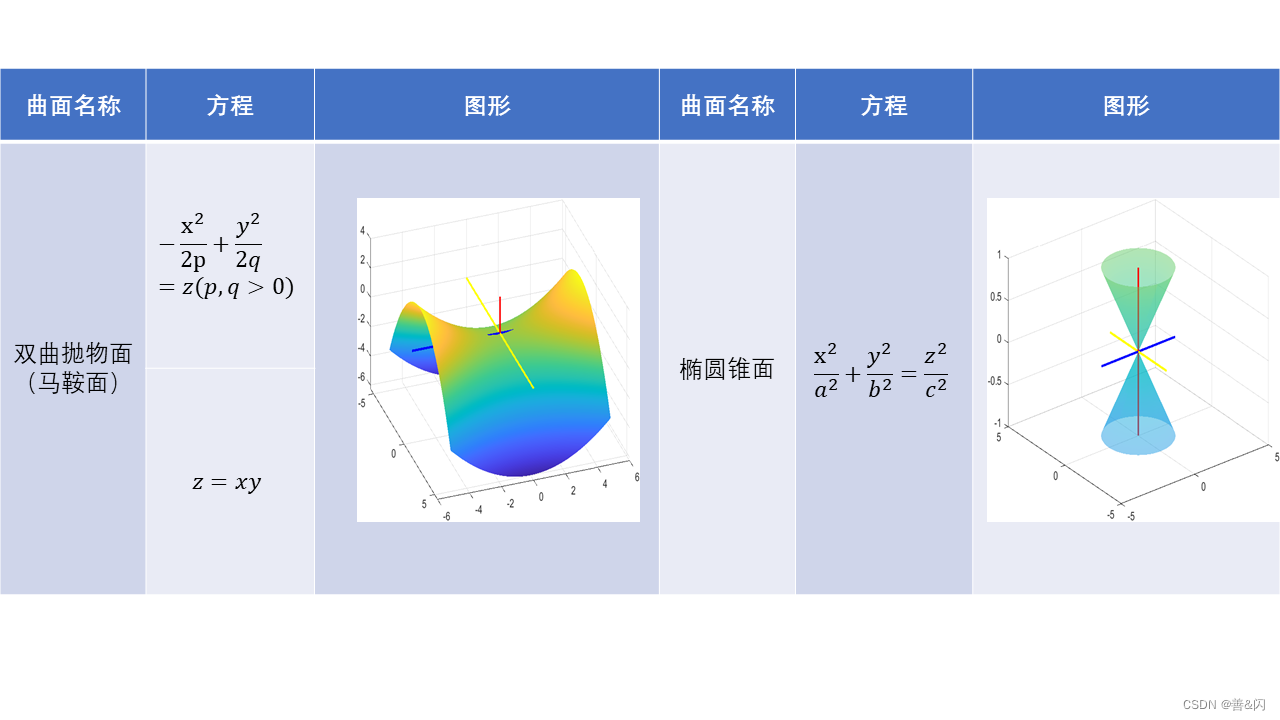
(2)二次曲面
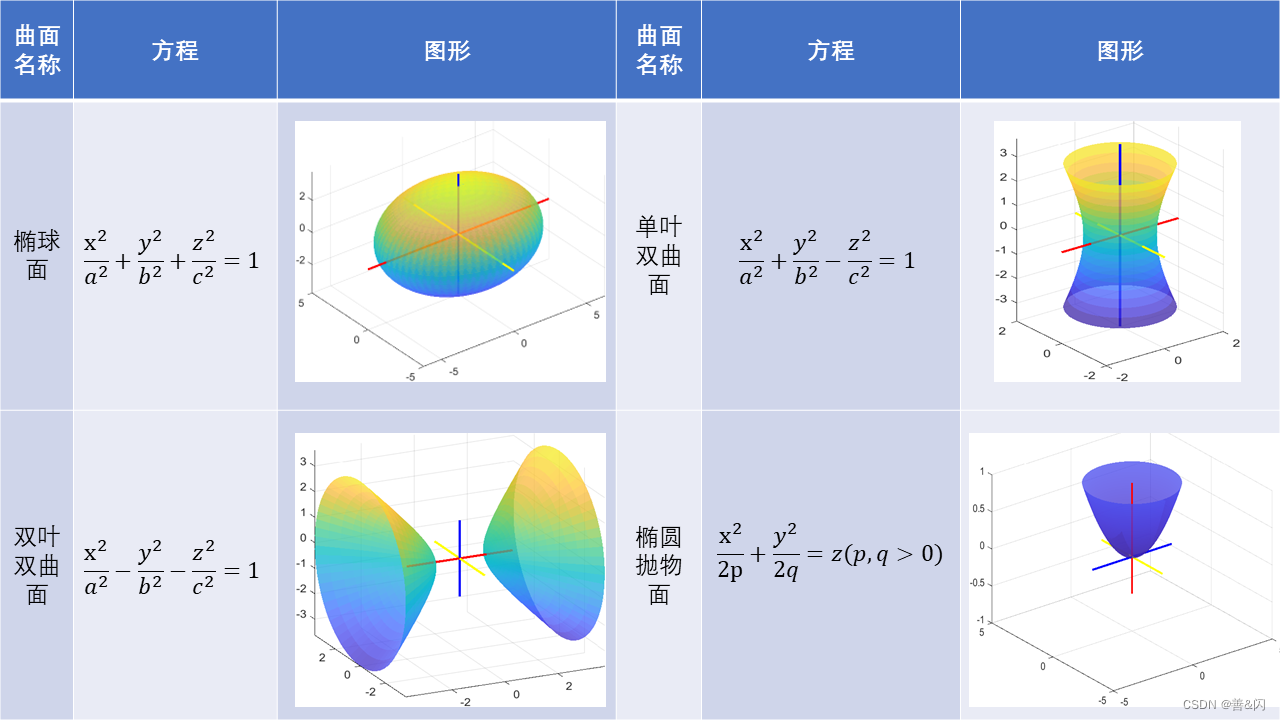
(3)柱面:动直线沿定曲线平行移动所形成的曲面
椭圆柱面 x 2 a 2 + y 2 b 2 = 1 \displaystyle\quad\frac{x^2}{a^2}+\frac{y^2}{b^2}=1 a2x2+b2y2=1
双曲柱面 x 2 a 2 − y 2 b 2 = 1 \displaystyle\quad\frac{x^2}{a^2}-\frac{y^2}{b^2}=1 a2x2−b2y2=1
抛物柱面
y
=
a
x
2
\displaystyle\quad y=ax^2
y=ax2
注:在空间解析几何中,一般认为缺少变量的方程为柱面。
(4)旋转曲面(重点):曲线
Γ
\Gamma
Γ绕一条定直线旋转一周所形成的曲面。
曲线
Γ
:
{
F
(
x
,
y
,
z
)
=
0
,
G
(
x
,
y
,
z
)
=
0
\Gamma:\begin{cases} F(x,y,z)=0,\\ G(x,y,z)=0 \end{cases}
Γ:{F(x,y,z)=0,G(x,y,z)=0绕直线
L
:
x
−
x
0
m
=
y
−
y
0
n
=
z
−
z
0
p
\displaystyle L:\frac{x-x_0}{m}=\frac{y-y_0}{n}=\frac{z-z_0}{p}
L:mx−x0=ny−y0=pz−z0旋转形成一个曲面,旋转曲面的求法如下:

如图所示,已知
M
0
(
x
0
,
y
0
,
z
0
)
M_0(x_0,y_0,z_0)
M0(x0,y0,z0),方向向量
s
⃗
=
(
m
,
n
,
p
)
.
\vec{s}=(m,n,p).
s=(m,n,p).在母线
Γ
\Gamma
Γ上任取一点
M
1
(
x
1
,
y
1
,
z
1
)
M_1(x_1,y_1,z_1)
M1(x1,y1,z1),则过
M
1
M_1
M1的维圆上的任意一点
P
(
x
,
y
,
z
)
P(x,y,z)
P(x,y,z)满足条件
M
1
P
→
⊥
s
,
∣
M
1
P
→
∣
=
∣
M
0
M
1
→
∣
\overrightarrow{M_1P} \perp \bm s,|\overrightarrow{M_1P} |=|\overrightarrow{M_0M_1}|
M1P⊥s,∣M1P∣=∣M0M1∣,即
{
m
(
x
−
x
1
)
+
n
(
y
−
y
1
)
+
p
(
z
−
z
1
)
=
0
(
x
−
x
0
)
2
+
(
y
−
y
0
)
2
+
(
z
−
z
0
)
2
=
(
x
1
−
x
0
)
2
+
(
y
1
−
y
0
)
2
+
(
z
1
−
z
0
)
2
,
\displaystyle\begin{cases} m(x-x_1)+n(y-y_1)+p(z-z_1)=0\\ (x-x_0)^2+(y-y_0)^2+(z-z_0)^2=(x_1-x_0)^2+(y_1-y_0)^2+(z_1-z_0)^2, \end{cases}
{m(x−x1)+n(y−y1)+p(z−z1)=0(x−x0)2+(y−y0)2+(z−z0)2=(x1−x0)2+(y1−y0)2+(z1−z0)2,与方程
F
(
x
1
,
y
1
,
z
1
)
=
0
F(x_1,y_1,z_1)=0
F(x1,y1,z1)=0和
G
(
x
1
,
y
1
,
z
1
)
=
0
G(x_1,y_1,z_1)=0
G(x1,y1,z1)=0联立消去
x
1
,
y
1
,
z
1
,
x_1,y_1,z_1,
x1,y1,z1,便可得到旋转曲面的方程。
4.多元函数微分学的几何应用
(1)空间曲线的切线与法平面
(1)设空间曲线 Γ \Gamma Γ由参数方程 { x = φ ( t ) , y = ψ ( t ) , z = ω ( t ) \begin{cases} x=\varphi(t),\\ y=\psi(t),\\ z=\omega(t) \end{cases} ⎩ ⎨ ⎧x=φ(t),y=ψ(t),z=ω(t)给出,其中 φ ( t ) , ψ ( t ) , ω ( t ) \varphi(t),\psi(t),\omega(t) φ(t),ψ(t),ω(t)均可导,
P 0 ( x 0 , y 0 , z 0 ) P_0(x_0,y_0,z_0) P0(x0,y0,z0)是 Γ \Gamma Γ上的点,且当 t = t 0 t=t_0 t=t0时, φ ′ ( t 0 ) , ψ ′ ( t 0 ) , ω ′ ( t 0 ) \varphi^{'}(t_0),\psi^{'}(t_0),\omega ^{'}(t_0) φ′(t0),ψ′(t0),ω′(t0)都不为0,则
①曲线 Γ \Gamma Γ在点 P 0 ( x 0 , y 0 , z 0 ) P_0(x_0,y_0,z_0) P0(x0,y0,z0)处的切向量为 τ = ( φ ′ ( t 0 ) , ψ ′ ( t 0 ) , ω ′ ( t 0 ) ) \tau =(\varphi^{'}(t_0),\psi^{'}(t_0),\omega ^{'}(t_0)) τ=(φ′(t0),ψ′(t0),ω′(t0)).
②曲线 Γ \displaystyle\Gamma Γ在点 P 0 ( x 0 , y 0 , z 0 ) P_0(x_0,y_0,z_0) P0(x0,y0,z0)处的切线方程为 x − x 0 φ ′ ( t 0 ) = y − y 0 ψ ′ ( t 0 ) = z − z 0 ω ′ ( t 0 ) \frac{x-x_0}{\varphi^{'}(t_0)}=\frac{y-y_0}{\psi^{'}(t_0)}=\frac{z-z_0}{\omega ^{'}(t_0)} φ′(t0)x−x0=ψ′(t0)y−y0=ω′(t0)z−z0.
③曲线 Γ \Gamma Γ在点 P 0 ( x 0 , y 0 , z 0 ) P_0(x_0,y_0,z_0) P0(x0,y0,z0)处的法平面(过点 P 0 ( x 0 , y 0 , z 0 ) P_0(x_0,y_0,z_0) P0(x0,y0,z0)且与切线垂直的平面)方程为 ψ ′ ( t 0 ) ( x − x 0 ) + φ ′ ( t 0 ) ( y − y 0 ) + ω ′ ( t 0 ) ( z − z 0 ) = 0 \displaystyle\psi^{'}(t_0)(x-x_0)+\varphi^{'}(t_0)(y-y_0)+\omega^{'}(t_0)(z-z_0)=0 ψ′(t0)(x−x0)+φ′(t0)(y−y0)+ω′(t0)(z−z0)=0
(2)设空间曲线 Γ \Gamma Γ由交面式方程 { F ( x , y , z ) = 0 , G ( x , y , z ) = 0 \begin{cases} F(x,y,z)=0,\\ G(x,y,z)=0 \end{cases} {F(x,y,z)=0,G(x,y,z)=0给出,则在以下表达式有意义的条件下,有
①曲线
Γ
\Gamma
Γ在点
P
0
(
x
0
,
y
0
,
z
0
)
P_0(x_0,y_0,z_0)
P0(x0,y0,z0)处的切向量为
τ
=
(
∣
F
y
′
F
z
′
G
y
′
G
z
′
∣
P
0
,
∣
F
z
′
F
x
′
G
z
′
G
x
′
∣
P
0
,
∣
F
x
′
F
y
′
G
x
′
G
y
′
∣
P
0
)
.
(4.19)
\tau =(\left | \begin{array}{} F^{'}_y &F^{'}_z\\[2ex] G^{'}_y &G^{'}_z \end{array}\right|_{P_0}, \left | \begin{array}{} F^{'}_z &F^{'}_x\\[2ex] G^{'}_z &G^{'}_x \end{array}\right|_{P_0}, \left | \begin{array}{} F^{'}_x &F^{'}_y\\[2ex] G^{'}_x &G^{'}_y \end{array}\right|_{P_0}).\tag{4.19}
τ=(
Fy′Gy′Fz′Gz′
P0,
Fz′Gz′Fx′Gx′
P0,
Fx′Gx′Fy′Gy′
P0).(4.19)②曲线
Γ
\Gamma
Γ在点
P
0
(
x
0
,
y
0
,
z
0
)
P_0(x_0,y_0,z_0)
P0(x0,y0,z0)处的切线方程为
x
−
x
0
∣
F
y
′
F
z
′
G
y
′
G
z
′
∣
P
0
=
y
−
y
0
∣
F
z
′
F
x
′
G
z
′
G
x
′
∣
P
0
=
z
−
z
0
∣
F
x
′
F
y
′
G
x
′
G
y
′
∣
P
0
.
(4.20)
\frac{x-x_0}{\left |\begin{array}{} F^{'}_y &F^{'}_z\\[2ex] G^{'}_y &G^{'}_z \end{array}\right|_{P_0}}= \frac{y-y_0}{\left | \begin{array}{} F^{'}_z &F^{'}_x\\[2ex] G^{'}_z &G^{'}_x \end{array}\right|_{P_0}}= \frac{z-z_0}{\left | \begin{array}{} F^{'}_x &F^{'}_y\\[2ex] G^{'}_x &G^{'}_y \end{array}\right|_{P_0}}.\tag{4.20}
Fy′Gy′Fz′Gz′
P0x−x0=
Fz′Gz′Fx′Gx′
P0y−y0=
Fx′Gx′Fy′Gy′
P0z−z0.(4.20)③曲线
Γ
\Gamma
Γ在点
P
0
(
x
0
,
y
0
,
z
0
)
P_0(x_0,y_0,z_0)
P0(x0,y0,z0)处的法平面方程为
∣
F
y
′
F
z
′
G
y
′
G
z
′
∣
P
0
(
x
−
x
0
)
+
∣
F
y
′
F
z
′
G
y
′
G
z
′
∣
P
0
(
y
−
y
0
)
+
∣
F
x
′
F
y
′
G
x
′
G
y
′
∣
P
0
(
z
−
z
0
)
=
0
(4.21)
\left |\begin{array}{} F^{'}_y &F^{'}_z\\[2ex] G^{'}_y &G^{'}_z \end{array}\right|_{P_0}(x-x_0)+ \left |\begin{array}{} F^{'}_y &F^{'}_z\\[2ex] G^{'}_y &G^{'}_z \end{array}\right|_{P_0}(y-y_0)+ \left | \begin{array}{} F^{'}_x &F^{'}_y\\[2ex] G^{'}_x &G^{'}_y \end{array}\right|_{P_0}(z-z_0)=0\tag{4.21}
Fy′Gy′Fz′Gz′
P0(x−x0)+
Fy′Gy′Fz′Gz′
P0(y−y0)+
Fx′Gx′Fy′Gy′
P0(z−z0)=0(4.21)
(2)空间曲面的切平面与法线
(1)设空间曲面 Σ \Sigma Σ由方程 F ( x , y , z ) = 0 F(x,y,z)=0 F(x,y,z)=0给出, P 0 ( x 0 , y 0 , z 0 ) P_0(x_0,y_0,z_0) P0(x0,y0,z0)是 Σ \Sigma Σ上的点,则
①曲面
Σ
\Sigma
Σ在点
P
0
(
x
0
,
y
0
,
z
0
)
P_0(x_0,y_0,z_0)
P0(x0,y0,z0)处的法向量(垂直于该点切平面的向量)为
n
=
(
F
x
′
(
x
0
,
y
0
,
z
0
)
,
F
y
′
(
x
0
,
y
0
,
z
0
)
,
F
z
′
(
x
0
,
y
0
,
z
0
)
)
,
\bm n=(F^{'}_x(x_0,y_0,z_0),F^{'}_y(x_0,y_0,z_0),F^{'}_z(x_0,y_0,z_0)),
n=(Fx′(x0,y0,z0),Fy′(x0,y0,z0),Fz′(x0,y0,z0)),且法线方程为
x
−
x
0
F
x
′
(
x
0
,
y
0
,
z
0
)
=
y
−
y
0
F
y
′
(
x
0
,
y
0
,
z
0
)
=
z
−
z
0
F
z
′
(
x
0
,
y
0
,
z
0
)
.
\frac{x-x_0}{F^{'}_x(x_0,y_0,z_0)}=\frac{y-y_0}{F^{'}_y(x_0,y_0,z_0)}=\frac{z-z_0}{F^{'}_z(x_0,y_0,z_0)}.
Fx′(x0,y0,z0)x−x0=Fy′(x0,y0,z0)y−y0=Fz′(x0,y0,z0)z−z0.
②曲面 Σ \Sigma Σ在点 P 0 ( x 0 , y 0 , z 0 ) P_0(x_0,y_0,z_0) P0(x0,y0,z0)处的切平面方程为 F x ′ ( x 0 , y 0 , z 0 ) ( x − x 0 ) + F y ′ ( x 0 , y 0 , z 0 ) ( y − y 0 ) + F z ′ ( x 0 , y 0 , z 0 ) ( z − z 0 ) = 0 F^{'}_x(x_0,y_0,z_0)(x-x_0)+F^{'}_y(x_0,y_0,z_0)(y-y_0)+F^{'}_z(x_0,y_0,z_0)(z-z_0)=0 Fx′(x0,y0,z0)(x−x0)+Fy′(x0,y0,z0)(y−y0)+Fz′(x0,y0,z0)(z−z0)=0
(2)设空间曲面 Σ \Sigma Σ由方程 z = f ( x , y ) z=f(x,y) z=f(x,y)给出,令 F ( x , y , z ) = f ( x , y ) − z F(x,y,z)=f(x,y)-z F(x,y,z)=f(x,y)−z,则
①曲面 Σ \Sigma Σ在点 P 0 ( x 0 , y 0 , z 0 ) P_0(x_0,y_0,z_0) P0(x0,y0,z0)处的法向量为 n = ( f x ′ ( x 0 , y 0 ) , f y ′ ( x 0 , y 0 ) , − 1 ) , \bm n=(f^{'}_x(x_0,y_0),f^{'}_y(x_0,y_0),-1), n=(fx′(x0,y0),fy′(x0,y0),−1),且法线方程为 x − x 0 f x ′ ( x 0 , y 0 ) = y − y 0 f y ′ ( x 0 , y 0 ) = z − z 0 − 1 \frac{x-x_0}{f^{'}_x(x_0,y_0)}=\frac{y-y_0}{f^{'}_y(x_0,y_0)}=\frac{z-z_0}{-1} fx′(x0,y0)x−x0=fy′(x0,y0)y−y0=−1z−z0
②曲线
Σ
\Sigma
Σ在点
P
0
(
x
0
,
y
0
,
y
0
)
P_0(x_0,y_0,y_0)
P0(x0,y0,y0)处的平面方程为
f
x
′
(
x
0
,
y
0
)
(
x
−
x
0
)
+
f
y
′
(
x
0
,
y
0
)
(
y
−
y
0
)
−
(
z
−
z
0
)
=
0
f^{'}_x(x_0,y_0)(x-x_0)+f^{'}_y(x_0,y_0)(y-y_0)-(z-z_0)=0
fx′(x0,y0)(x−x0)+fy′(x0,y0)(y−y0)−(z−z0)=0【注】若用
α
,
β
,
γ
\alpha ,\beta,\gamma
α,β,γ表示曲面
z
=
f
(
x
,
y
)
z=f(x,y)
z=f(x,y)在点
P
0
(
x
0
,
y
0
,
z
0
)
P_0(x_0,y_0,z_0)
P0(x0,y0,z0)处的法向量的方向角,并假定法向量的方向是向上的,即它与
z
z
z轴正向所成的角
γ
\gamma
γ是锐角,则法向量的方向余弦为
cos
α
=
−
f
x
1
+
f
x
2
+
f
y
2
,
cos
β
=
−
f
y
1
+
f
x
2
+
f
y
2
,
cos
γ
=
−
1
1
+
f
x
2
+
f
y
2
.
\cos \alpha=\frac{-f_x}{\sqrt{1+f^{2}_x+f^{2}_y}},\cos \beta=\frac{-f_y}{\sqrt{1+f^{2}_x+f^{2}_y}},\cos \gamma=\frac{-1}{\sqrt{1+f^{2}_x+f^{2}_y}}.
cosα=1+fx2+fy2−fx,cosβ=1+fx2+fy2−fy,cosγ=1+fx2+fy2−1.
5.场论初步
(1)方向导数
偏导数反映函数沿着坐标轴方向的变化率,不够全面,需要研究函数沿任一指定方向的变化率,即方向导数。
定义1 设三元函数
u
=
u
(
x
,
y
,
z
)
u=u(x,y,z)
u=u(x,y,z)在点
P
0
(
x
0
,
y
0
,
y
0
)
P_0(x_0,y_0,y_0)
P0(x0,y0,y0)的某空间邻域
U
⊂
R
3
U\subset\bm R^3
U⊂R3内有定义,
l
l
l为从点
P
0
P_0
P0出发的射线,
P
(
x
,
y
,
z
)
P(x,y,z)
P(x,y,z)为
l
l
l上且在
U
U
U内的任一点,则
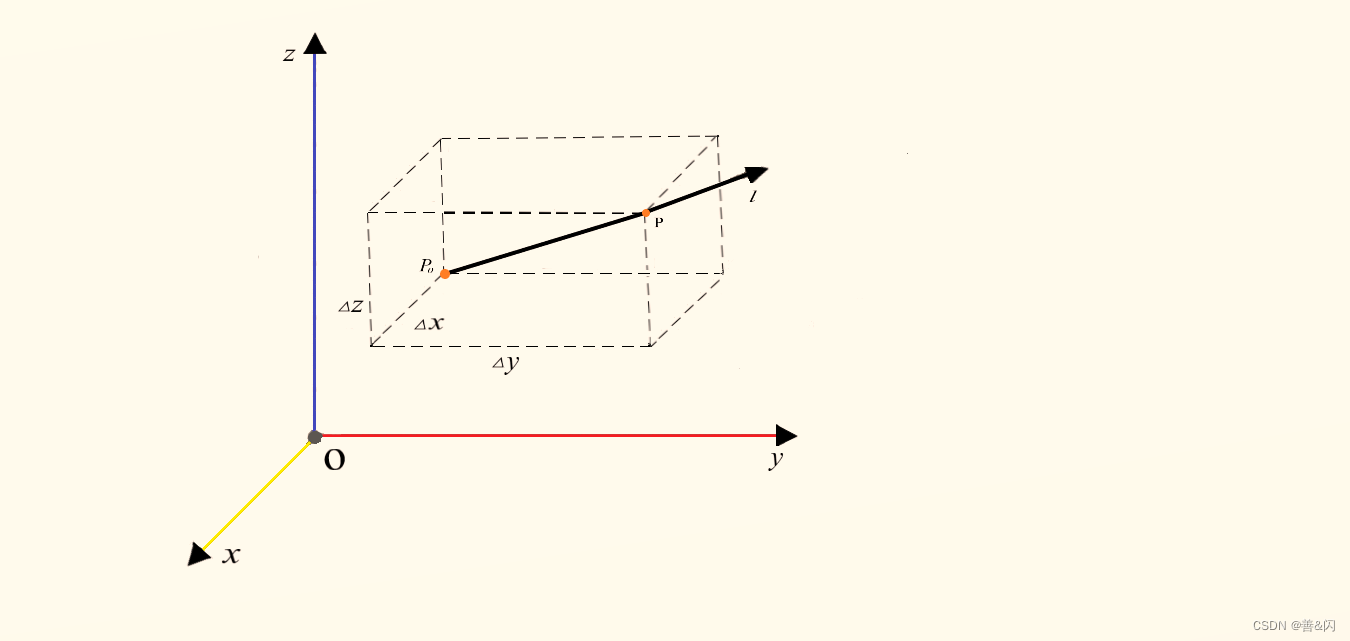
{
x
−
x
0
=
Δ
x
=
t
cos
α
,
y
−
y
0
=
Δ
y
=
t
cos
β
,
z
−
z
0
=
Δ
z
=
t
cos
γ
.
\begin{cases} x-x_0=\Delta x=t\cos \alpha,\\[2ex] y-y_0=\Delta y=t\cos \beta,\\[2ex] z-z_0=\Delta z=t\cos \gamma. \end{cases}
⎩
⎨
⎧x−x0=Δx=tcosα,y−y0=Δy=tcosβ,z−z0=Δz=tcosγ.以
t
=
(
Δ
x
)
2
+
Δ
y
)
2
+
Δ
z
)
2
t=\sqrt{(\Delta x)^2+\Delta y)^2+\Delta z)^2}
t=(Δx)2+Δy)2+Δz)2表示
P
P
P与
P
0
P_0
P0之间的距离,如图所示,若极限
lim
t
→
0
+
u
(
P
)
−
u
(
P
0
)
t
=
lim
t
→
0
+
u
(
x
0
+
t
cos
α
,
y
0
+
t
cos
β
,
z
0
+
t
cos
γ
)
−
u
(
x
0
,
y
0
,
z
0
)
t
\lim_{t\to 0^+}\frac{u(P)-u(P_0)}{t}=\lim_{t\to 0^+}\frac{u(x_0+t\cos \alpha,y_0+t\cos \beta,z_0+t\cos \gamma)-u(x_0,y_0,z_0)}{t}
t→0+limtu(P)−u(P0)=t→0+limtu(x0+tcosα,y0+tcosβ,z0+tcosγ)−u(x0,y0,z0)存在,则称此极限为函数
u
=
u
(
x
,
y
,
z
)
u=u(x,y,z)
u=u(x,y,z)在点
P
0
P_0
P0沿方向
l
l
l的方向导数,记作
∂
u
∂
l
∣
P
0
.
\left.\frac{\partial u}{\partial \bm l}\right|_{P_0}.
∂l∂u
P0.
定理(方向导数的计算公式) 设三元函数
u
=
u
(
x
,
y
,
z
)
u=u(x,y,z)
u=u(x,y,z)在点
P
0
(
x
0
,
y
0
,
y
0
)
P_0(x_0,y_0,y_0)
P0(x0,y0,y0)处可微分,则
u
=
(
x
,
y
,
z
)
u=(x,y,z)
u=(x,y,z)在点
P
0
P_0
P0处沿任一方向
l
l
l的方向导数都存在,且
∂
u
∂
l
∣
P
0
=
u
x
′
(
P
0
)
cos
α
+
u
y
′
(
P
0
)
cos
β
+
u
z
′
(
P
0
)
cos
γ
(4.27)
\left.\frac{\partial u}{\partial \bm l}\right|_{P_0}=u^{'}_x(P_0)\cos \alpha+u^{'}_y(P_0)\cos \beta+u^{'}_z(P_0)\cos \gamma\tag{4.27}
∂l∂u
P0=ux′(P0)cosα+uy′(P0)cosβ+uz′(P0)cosγ(4.27)其中,
cos
α
,
cos
β
,
cos
γ
\cos \alpha,\cos \beta,\cos\gamma
cosα,cosβ,cosγ为
l
l
l的方向余弦。
(2)梯度
定义2 设三元函数 u = u ( x , y , z ) u=u(x,y,z) u=u(x,y,z)在点 P 0 ( x 0 , y 0 , y 0 ) P_0(x_0,y_0,y_0) P0(x0,y0,y0)处有一阶偏导数,则定义 g r a d u ∣ P 0 = ( u x ′ ( P 0 ) , u y ′ ( P 0 ) , u z ′ ( P 0 ) ) \left.\bm{grad} ~~\bm u\right|_{P_0}=(u^{'}_x(P_0),u^{'}_y(P_0),u^{'}_z(P_0)) grad u∣P0=(ux′(P0),uy′(P0),uz′(P0))为函数 u = u ( x , y , z ) u=u(x,y,z) u=u(x,y,z)在点 P 0 P_0 P0处的梯度。
(3)方向导数与梯度的关系
由方向导数的计算公式4.27与梯度定义可得 ∂ u ∂ l ∣ P 0 = ( u x ′ ( P 0 ) + u y ′ ( P 0 ) + u z ′ ( P 0 ) ) ⋅ ( cos α , cos β , cos γ ) = g r a d u ∣ P 0 ⋅ l 0 = ∣ g r a d u ∣ P 0 ∣ ∣ l 0 ∣ cos θ = ∣ g r a d u ∣ P 0 ∣ cos θ \begin{aligned} \left.\frac{\partial u}{\partial \bm l}\right|_{P_0} &=(u^{'}_x(P_0)+u^{'}_y(P_0)+u^{'}_z(P_0))\cdot(\cos \alpha,\cos \beta,\cos \gamma)\\[2ex] &=\left.\bm{grad} ~~u\right|_{P_0}\cdot \bm l^{0}\\[2ex] &=|\left.\bm{grad} ~~u\right|_{P_0}||\bm l^{0}|\cos\theta\\[2ex] &=|\left.\bm{grad} ~~u\right|_{P_0}|\cos\theta \end{aligned} ∂l∂u P0=(ux′(P0)+uy′(P0)+uz′(P0))⋅(cosα,cosβ,cosγ)=grad u∣P0⋅l0=∣grad u∣P0∣∣l0∣cosθ=∣grad u∣P0∣cosθ其中 θ \theta θ为 g r a d u ∣ P 0 与 l 0 \left.\bm{grad} ~~u\right|_{P_0} 与\bm l^{0} grad u∣P0与l0的夹角,当 cos θ = 1 \cos \theta=1 cosθ=1时, ∂ u ∂ l ∣ P 0 \left.\frac{\partial u}{\partial \bm l}\right|_{P_0} ∂l∂u P0有最大值。
结论 函数在某点的梯度是一个向量,它的方向与取得最大方向导数的方向一致,而它的模为方向导数的最大值。
(4)散度与旋度
设向量场 A ( x , y , z ) = ( P ( x , y , z ) , Q ( x , y , z ) , R ( x , y , z ) ) , \bm A(x,y,z)=(P(x,y,z),Q(x,y,z),R(x,y,z)), A(x,y,z)=(P(x,y,z),Q(x,y,z),R(x,y,z)),即 A ⃗ = P i ⃗ + Q j ⃗ + R k ⃗ \vec{A}=\bm P\vec{i}+\bm Q\vec{j}+\bm R\vec{k} A=Pi+Qj+Rk则散度 d i v A = ∂ P ∂ x + ∂ Q ∂ y + ∂ R ∂ z , div A=\frac{\partial \bm P}{\partial x}+\frac{\partial \bm Q}{\partial y}+\frac{\partial \bm R}{\partial z}, divA=∂x∂P+∂y∂Q+∂z∂R,旋度 r o t A = i j k ∂ ∂ x ∂ ∂ y ∂ ∂ z P Q R \bm{rot} ~~A=\begin{array}{c|ccc|} &\bm{i}&\bm{j}&\bm{k}\\[2ex] &\frac{\partial }{\partial x}&\frac{\partial }{\partial y}&\frac{\partial }{\partial z}\\[2ex] &P&Q&R \end{array} rot A=i∂x∂Pj∂y∂Qk∂z∂R
6.计算补充
零向量方向是不确定的,可以指任意方向。
点乘:
a
⃗
⋅
a
⃗
=
∣
a
⃗
∣
2
\vec{a}\cdot\vec{a}=|\vec{a}|^{2}
a⋅a=∣a∣2
叉乘:
a
⃗
×
a
⃗
=
0
\vec{a}\times\vec{a}=0
a×a=0
坐标轴
x
,
y
,
z
x,y,z
x,y,z轴对应的单位方向向量分别为
i
⃗
,
j
⃗
,
k
⃗
\vec{i},\vec{j},\vec{k}
i,j,k,其任意两两叉乘均为另外一个单位向量,方向由右手定则确定,详细结果如下:
| i ⃗ \vec{i} i | j ⃗ \vec{j} j | k ⃗ \vec{k} k | |
|---|---|---|---|
| i ⃗ \vec{i} i | i ⃗ × i ⃗ = 0 ⃗ \vec{i}\times\vec{i}=\vec{0} i×i=0 | i ⃗ × j ⃗ = k ⃗ \vec{i}\times\vec{j}=\vec{k} i×j=k | i ⃗ × k ⃗ = − j ⃗ \vec{i}\times\vec{k}=-\vec{j} i×k=−j |
| j ⃗ \vec{j} j | j ⃗ × i ⃗ = − k ⃗ \vec{j}\times\vec{i}=-\vec{k} j×i=−k | j ⃗ × j ⃗ = 0 ⃗ \vec{j}\times\vec{j}=\vec{0} j×j=0 | j ⃗ × k ⃗ = i ⃗ \vec{j}\times\vec{k}=\vec{i} j×k=i |
| k ⃗ \vec{k} k | k ⃗ × i ⃗ = j ⃗ \vec{k}\times\vec{i}=\vec{j} k×i=j | k ⃗ × j ⃗ = − i ⃗ \vec{k}\times\vec{j}=-\vec{i} k×j=−i | k ⃗ × k ⃗ = 0 ⃗ \vec{k}\times\vec{k}=\vec{0} k×k=0 |
暂定这样,后续根据情况进行补充……














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









