







数字式传感器
1. 码盘式传感器基本工作原理。码盘式传感器分辨率的计算。二进制码盘与循环编码的特点与区别。消除粗大误差的方法有哪些。
2. 光栅传感器的基本工作原理。莫尔条纹间距与夹角之间的关系。方向辨别原理。
码盘式传感器
码盘式编码器也称为绝对编码器,它将角度或直线坐标转换为数字编码。
光学码盘式传感器
用光电方法把被测角位移转换成以数字代码形式表示的电信号的转换部件。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ezkpOnB1-1651743796581)(C:/Users/86150/AppData/Roaming/Typora/typora-user-images/image-20220503172207884.png)]

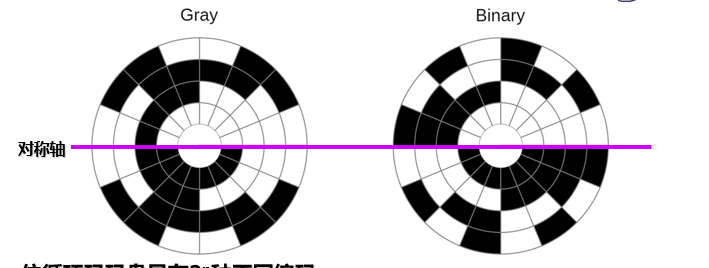
粗误差:来源:二进制码当某一较高的数码改变时, 所有比它低的各位数码均需同时改变。
消除粗大误差:双读数头法和循环码代替二进制码。
双读数头的优点是可以消除粗误差,精度由最低位(C1码道)决定。双读数头的缺点是读数头的个数增加了一倍。当编码器位数很多时,光电元件安装位置也有困难。
循环码:格雷码
光栅传感器
光栅传感器由光源、透镜、标尺光栅、指示光栅和接收光电器件组成。
//不动的是 指示光栅
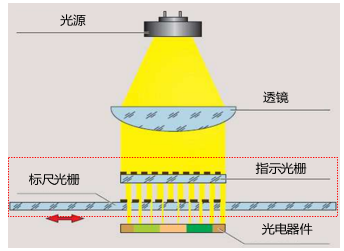
工作原理:当标尺光栅相对于指示光栅移动时,利用光电接收器件将光信号转换成电信号,从而测量出标尺光栅的移动距离。
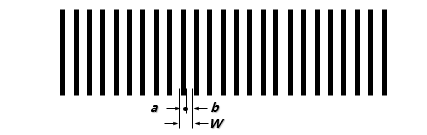
光栅常数 W=a+b
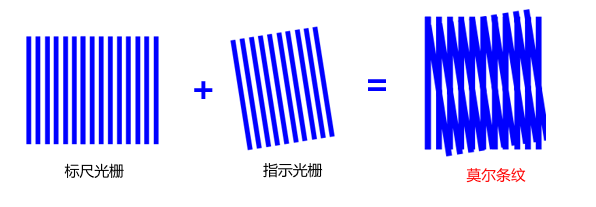
莫尔条纹
(1) 位移的移动方向(右下,左上)
当标尺光栅沿着刻线垂直方向向右移动时,莫尔条纹将沿着指示光栅的栅线向下移动;
当标尺光栅向左移动时,莫尔条纹沿着指示光栅的栅线向上移动。
(2) 位移的放大作用
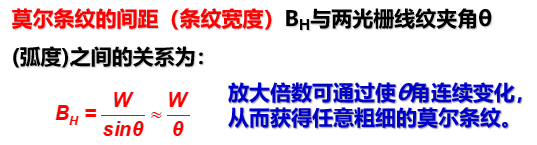
当光栅每移动一个光栅栅距W 时, 莫尔条纹也跟着移动一个条纹宽度BH,这相当于把栅距W放大了1/θ 倍。提高了灵敏度。
(3)光强分布
莫尔条纹的光强度变化近似呈正弦变化,在莫尔条纹中心光强度最大,在莫尔条纹的边缘光强度最小。
敏度。
(3)光强分布
莫尔条纹的光强度变化近似呈正弦变化,在莫尔条纹中心光强度最大,在莫尔条纹的边缘光强度最小。
辨向: 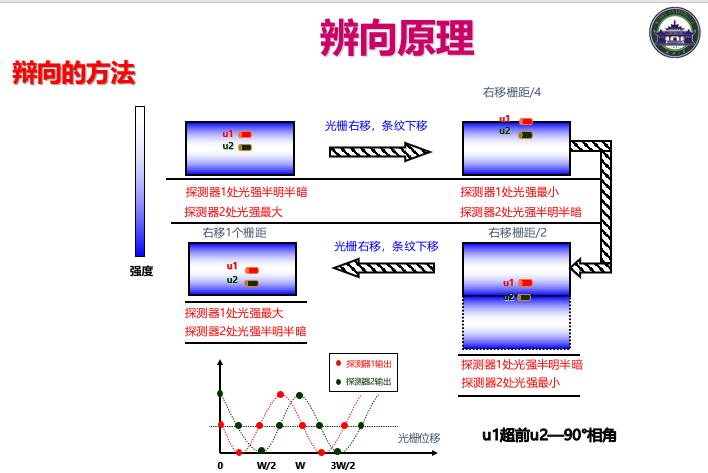














 331
331











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









