







这是一篇2011ICCV的文章,重点是Selective Search.
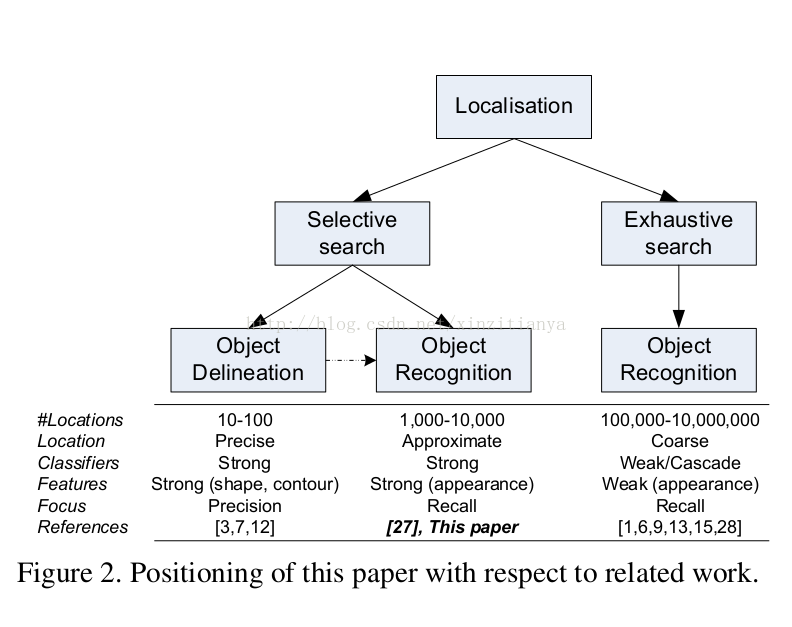
其中Exhaustive中还包括sliding window,part-based等等。
而这篇用改进的segmentation, a hierachical grouping algorithm来做Selective Search
使用part-based object segmentation作为起点,然后hierachy group,针对不同的color space。过程中利用greedy algorithm,利用similarity不断合并两个neighbour region.
S(a, b) = S size (a, b) + S texture (a, b)
S size(a,b) is defined as the fraction of the image that the segment a and b jointly occupy
S texture (a, b) is defined as the histogram intersection between SIFT-like texture measurements
作者在个人主页只提供了可执行文件,在http://dlib.net/imaging.html有c++的开源实现。
附上average precision的measurement
he detection task will be judged by the precision/recall curve. The principal quantitative measure used will be the average precision (AP) (see section 3.4.1). Example code for computing the precision/recall and AP measure is provided in the development kit. Detections are considered true or false positives based on the area of overlap with ground truth bounding boxes. To be considered a correct detection, the area of overlap ![]() between the predicted bounding box
between the predicted bounding box ![]() and ground truth bounding box
and ground truth bounding box ![]() must exceed
must exceed ![]() by the formula:
by the formula:














 538
538











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









