







论文《实时2D/D配准的一种CNN回归方法》分析:
(该文章的写作思路:在摘要中大致谈一下自己所提出的方法的可以解决什么样的问题,所涉及哪些方法,然后引言中提出好几种方法,介绍它们,提出缺点,然后引出本文的方法,接下来一点介绍该文所研究的事务的背景,下一节细节化介绍新方法,再下一节来证明自己所提出的方法是有效的,以及实验过程,最后一节总结结果)
摘要:
- 提出一种卷积神经网络回归的方法(也称之为PEHL),该方法用于解决现有的基于强度的2D/3D配准技术所存在的两个主要的限制:1.计算慢。2.捕捉范围小(利用在配准之前进行初始化的方法来解决——利用目标物体的主要特征来进行姿态恢复)
- 该方法的关键在于训练一个CNN回归器用于恢复 从DRR和X光图像到它们潜在变换参数之间差异的映射
本篇论文提出的方法:
- 利用嵌入在数字化重建的放射图像和X光图像表面的信息并利用回归器来预估出变换参数
- 所涉及的具体方法:自动化特征提取步骤(An antomatic feature extraction step)——用于计算3D姿态索引特征,这个特征对要回归的变量很敏感,对于其余变量很健壮(robust)
基于优化方法的原理(optization-basesd methods):通过迭代的优化变换参数(代表配准质量的标量值度量函数——scalar-valued metric function) - 权重共享是为了减少内存占用
- 优化器(Optimizer)的作用在于是在DRR和X光图像之间最大化相似性度量
Ⅰ引言:
-
术前三维数据包括:CT,CBCT,MRI(磁共振成像),CAD(计算机辅助设计)
-
术中二维数据:X光成像
-
此篇论文的着重点:将CT或CBCT提供的三维X光衰减图和2维的X光图像配准
-
在现有的方法中,较为精确的二维/三维配准通常都是基于强度(intensity-based method)的2D/3D配准方法获得的,但是此方法有两个缺点:计算时间长(涉及到大量的相似性度量的评估),捕捉范围小(优化相似性度量的方法通常是非凸的,优化器很有可能陷入局部最大值(local maxima),因此捕捉范围小) 该方法若想解决捕捉范围小这个问题:在配准之前使用初始化的方法;加快配准速度的方法:1.稀疏采样(sparse sampling)解释在下面(但是只有一小部分适合)。2.拼接(splatting),解释在下面,这个方法存在一个缺点:有叠影,导致配准质量下降
-
DRR来自于对虚拟X光模拟所获得的三维X光衰减图像
-
PEHL方法:训练一个恢复映射的回归器很复杂,该文中通过简化以下三个方法简化非线性关系然后获得映射关系:
- LIR:近似于三维姿态索引,只会被初始值与基值之间的差异所影响
- PSP:将变换参数空间划分为很多小区域,对每个小区域进行回归器的训练
- HPR:分解变换参数并用层级方式进行回归
段落分析:
1.基础解释
2.现有方法中的2D/3D配准
Ⅱ问题公式化:(这一部分主要讲2维/3维配准的背景,并且可把配准的问题看成是一个回归问题)
A—X光成像模型:
X光图像生成公式:
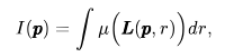
表示I(p)在点p处x光图像的强度
衰减系数:

最终:

B——三维变换的参数化:
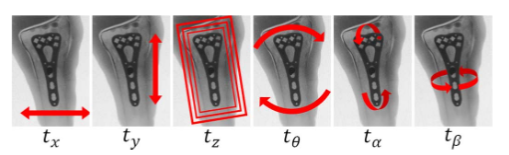
六个变换参数(三个平面和三个非平面参数)
C——通过回归进行二维/三维图像的配准(二维/三维图像的配准可看成是一个回归问题)
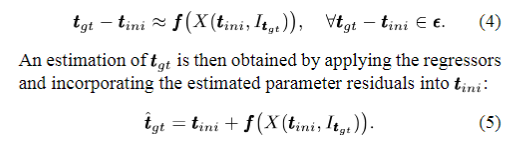
X()表示一个特征提取器
f()表示回归器,表达映射关系
Ⅲ通过层级学习进行姿态估计
(这一部分主要描述细节:(1)特征 如何被计算(2)回归器如何被设计训练和应用的)
如何被计算(2)回归器如何被设计训练和应用的)
A——参数的空间划分
训练回归器的目的:

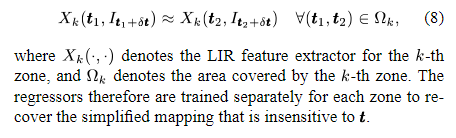
提取姿态索引特征:
这个特征对残差很敏感,对t不敏感,性质如下:

B——局部图像残差(LIR)
此部分的目的在于:

- (1)对局部图像残差进行计算
在2D图像平面中确定一个局部ROI
由参数
描述
分别表示中心,宽度和方向 - (2)三维点的提取
三维点通常用于计算LIR特征的提取(两个步骤)
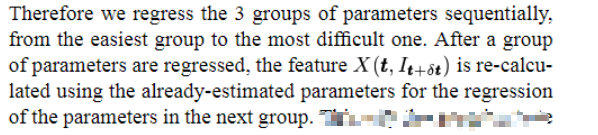
C——层级参数的回归
同时回归6个参数,使得所回归的映射会涉及多个组成因素,现进行层级划分,划分为三组:

这三组难度递增
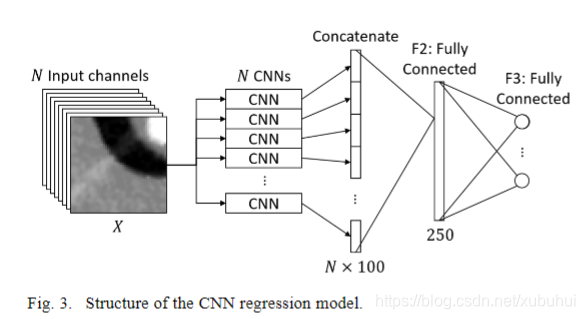
D——CNN回归模型
所提出的回归方法有几个方面的挑战
- (1)该对于复杂映射需要足够灵活
- (2)该模型的权重需要足够轻使得能够实时转发并存储在RAM当中
如何解决这两个挑战:
-
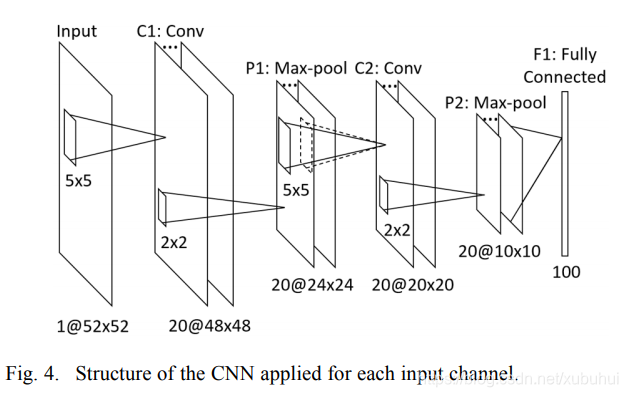
(1)网络结构(Network Structure):
一个CNN回归模型图如上图所示,
应用在每个channel中的CNN结构如下所示:
-
(2)训练(Training):
CNN回归模型在合成的X光图像中进行训练(参数均均匀分布)
Ⅳ 实验(Experiments)
A——数据集(Dataset)
通过三个方面对PEHL的实时2D/3D配准的应用对该方法评价:
- (1)Total Knee Arthroplasty(TKA)
使用二维/三维配准方法,可以透视视频的方法匹配膝盖的三维模型,可以预估膝关节的运动状态 - (2)Virtual Implant Planning System (VIPS)
在这个应用当中,二维/三维配准被用于匹配虚拟的三维植入物(通过对真实植入物的透视视频来获得) - (3)X-ray Echo Fusion (XEF)
二维/三维配准被用于预测经食管超声心动图探头的三位姿态估计
Ⅴ 结果
该文章为了使用回归解决实时2D/3D配准问题,提出了一个CNN回归方法——PEHL,并且介绍了三个新颖的算法策略,LIR,HPR和PSP,简化了用于回归的潜在映射,且设计了一个CNN回归模型。印证了这三个算法策略和CNN回归模型对于PEHL很重要,三次迭代为最优化的设置,此刻的成功率已经很高
英语缩略词集合:
- DRR:Digitally Reconstructed Radiograph——数字化重建X光图像(模拟的X光图像——通过模拟虚拟X光图像的3维衰减映射得到的)
- GHT:Generalizd Hough Transform——广义霍夫变换——>用于对脊椎进行初始的姿态估计
- MI: Mutual Information
- SRC: Stochastic Rank Correlation——随机秩关联
- MLP: Multi-Layer Perception——多层感知器
- PEHL: Pose Estimation via Hierarchical Learning——通过层级学习进行姿态估计,通过此方法能获得2维/3维配准精度和广度
- LIR: Local image residual——局部图像残差
- PSP: Parameter space partitioning——参数的空间划分
- HPR: 层级的参数回归
- SGD: Stochastic Gradient Descent——随机梯度下降
- TKA: Total Knee Arthroplasty——全膝关节置换术
- VIPS: Virtual Implant Planning System ——虚拟植入物计划系统
- XEF: X-ray Echo Fusion——X射线回声融合
- TEE: transesophageal echocardiography——经食道超声心动图
专业词汇解释:
- 相似性度量(similarity measure):两个事物越接近,它们的相似性度量也就越大,而两个事物越疏远,它们的相似性度量也就越小。
- 凸优化和非凸优化:
凸: 指的是顺着梯度方向走到底就 一定是 最优解 。 大部分 传统机器学习 问题 都是凸的。
非凸: 指的是顺着梯度方向走到底只能保证是局部最优,不能保证 是全局最优。深度学习以及小部分传统机器学习问题都是非凸的。
- 稀疏采样: 它作为一个新的采样理论,它通过开发信号的稀疏特性,在远小于Nyquist 采样率的条件下,用随机采样获取信号的离散样本,然后通过非线性重建算法完美的重建信号 。
- 拼接(splatting) 基于立体像素的体积渲染技术——直接将单个立体像素投影到成像平面
- 损失函数(loss function) 是用来估量模型的预测值f(x)与真实值Y的不一致程度,即度量拟合程度。它是一个非负实值函数,通常使用 L(Y, f(X)) 来表示,损失函数越小,模型的拟合越好,鲁棒性越好。
- 欧几里得损失: 对模型的训练期间将目标函数最小化














 2487
2487











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









