






出自:慕尼黑工业大学
期刊:未知
摘要:
我们解决了点云数据的位置识别问题,引入了自注意和方向编码网络(SOE-Net),充分利用点之间的关系,并将远距离上下文融合到点局部描述符中。在PointOE模块中捕获来自8个方向的每个点的局部信息,而局部描述符之间的远距离特征依赖则通过自注意单元捕获。此外,我们提出了一种新的损失函数,称为Hard Positive Hard Negative quadruplet loss (HPHN quadruplet),它比常用的度量学习损失具有更好的性能。在各种基准数据集上的实验表明,该网络的性能优于当前最先进的方法。代码地址:https://github.com/Yan-Xia/SOE-Net.
点云场景识别的必要性:
在大规模和复杂环境中,位置识别和场景定位是一个基础性的挑战,其应用范围从自动驾驶、机器人导航到增强现实。在过去的十年中,各种基于图像检索的解决方案显示出了很好的性能。然而,当由于天气和季节的变化导致光照和外观的剧烈变化时,基于图像的方法的性能往往会下降。点云受到天气和季节的变换的影响小,对三维信息进行操作,场景识别可以做的更为鲁棒。
主要贡献:
1、 提出了一种新颖的点定向编码方法(PointOE)模块有效地从给定的点云中提取局部描述符,考虑到每个点与其相邻点之间的关系。进一步设计了一个自注意单元来区分不同的局部描述符与全局描述符的重要性。
2、 设计了一个新的损失函数HPHN,对大规模点云检索更为有效。与以往的损失函数相比,它依靠正负对的最大距离和最小距离来实现更通用的全局描述符。
算法网络流程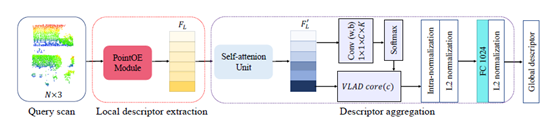
SOE-Net架构概述。网络以N个点的查询扫描作为输入,使用PointOE模块提取逐点的局部描述符FL。在描述符聚合时,在局部描述符上应用自注意单元,然后是NetVLAD层。最后,采用全连接层(FC)对输出描述符向量进行压缩,然后采用L2范数来产生一个全局描述符。
注:日常学习记录,转载请注明出处,欢迎讨论。















 5231
5231











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









