










实验室的东西又要开始做了,改进之前的东西。
平台:上位机:基于mfc的对话框的界面 vc6.0
dsp:TMS320F28335 软件平台:ccs3.3
FPGA:cycloneIII EP3C25Q240C8 软件平台:quartusII 11.1
主要原理如下:
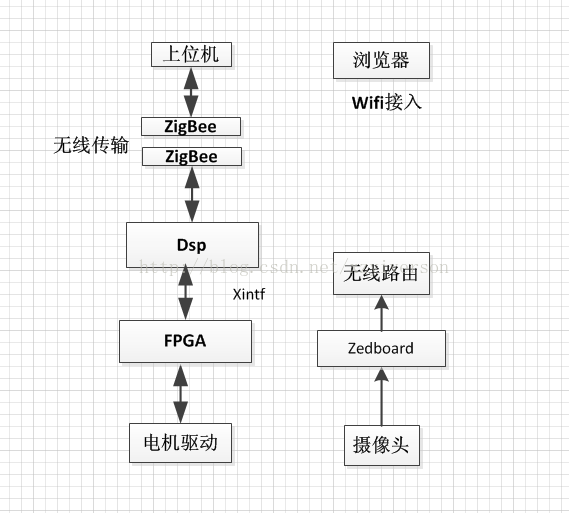
这是暂时实现的功能,机器人运动不是很稳定,准备对其进行改进,包括dsp和vc界面,正好也做一些记录。至于以后可能用zedboard这块板来完全代替dsp+FPGA的控制板,但这个是后话了,先做好眼前的事情。
改进计划:
首先,就是对dsp程序进行分析和改进了。
其次, 上位机界面。
下面就开始dsp的学习了。















 3005
3005

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









