







上一章用了牛顿欧拉递推式的动力学方程求解了6自由度机器人的各关节动力。具体可以看我的上一篇博客。
【机器人学】4-2.六自由度机器人动力学-牛顿欧拉递推式【附MATLAB代码】
这篇文章主要介绍拉格朗日方程求解机械臂的动力学。



几乎所有的书上,在介绍拉格朗日方程时,都会有上述公式,不过在使用MATLAB建模时却异常困难,由于物理意义不太明确,比较牛顿欧拉递推式难度指数级上升。博主也是无意中在一本书上看到了较简单的建模方式。
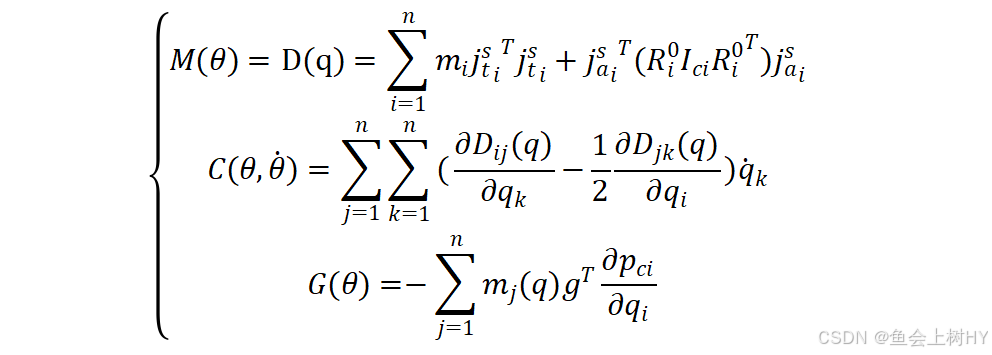
还记得【机器人学】4-1.六自由度机器人动力学-开篇-基础知识 中关于操作臂动力学方程的结构。

任何机械臂动力学方程都可以写成如上式(4.11)方程结构。如果我们可以分别求出M,V,G那么动力学方程也就迎刃而解。

假设机械臂动力学参数如下:
| 关节1 | 关节2 | 关节3 | 关节4 | 关节5 | 关节6 | |
| Ixx | 0 | -2.782 | -0.6741 | 0.4964 | 0.0893 | -0.2332 |
| Ixy | 0 | 0. 086 | -0.3658 | -0.3109 | -0.0252 | 0. 0203 |
| Ixz | 0 | -0.8413 | 0.0373 | 0.1658 | -0.0699 | -0.0601 |
| Iyy | 0 | 0 | 0 | 0 | 0 | 0 |
| Iyz | 3.7033 | -0.1364 | 0.0377 | 0.2139 | 0.0325 | 0.0477 |
| Izz | 0 | 2.4741 | 1.0102 | -0.1213 | 0. 151 | 0.0763 |
| lx | 0 | 3. 5349 | 1.8417 | -0.0475 | -0.0202 | 0.0006 |
| ly | 0 | 0. 0939 | 0.0746 | 0.1624 | -0.0844 | 0.03 |
| lz | 0 | 0 | 0 | 0 | 0 | 0 |
| m | 0 | 10 | 10 | 10 | 10 | 10 |
假设有六轴机器人的DH参数如下所示:
| 关节1 | 关节2 | 关节3 | 关节4 | 关节5 | 关节6 | |
| 0 | 90 | 0 | 0 | -90 | 90 | |
| a | 0 | 0 | 425 | 393 | 0 | 0 |
| d | 160.7 | 0 | 0 | 113.3 | 99 | 93.6 |
| 0 | 90 | 0 | -90 | 0 | 0 | |
| 0 | 0 | 0 | 0 | 0 | 0 |
MATLAB仿真验证
1. 求解解析参数
%求解解析参数
function [Jee,M,C,G] = myLagrange(dh,rob,Pc,Ic,g,m,q,dq)
alpha = dh(1,:);
a = dh(2,:);
d = dh(3,:);
theta = dh(4,:);
N = size(dh,2);
for i=1:N
pc{i}=Pc(:,i);
end
for i=1:N
if alpha(i)==0
Salpha(i)=0;
Calpha(i)=1;
elseif abs(alpha(i))==pi/2
Calpha(i)=0;
if alpha(i)==pi/2
Salpha(i)=1;
elseif alpha(i)==-pi/2
Salpha(i)=-1;
end
elseif abs(alpha(i))==pi
Salpha(i)=0;
Calpha(i)=-1;
else
Salpha(i)=sin(alpha(i));
Calpha(i)=cos(alpha(i));
end
end
% R
for i=1:N
if rob(i)==0 % Rotation matrix of revolute joints
R{i}=[cos(q(i)) -sin(q(i)) 0;
sin(q(i))*Calpha(i) cos(q(i))*Calpha(i) -Salpha(i);
sin(q(i))*Salpha(i) cos(q(i))*Salpha(i) Calpha(i)];
elseif rob(i)==1 % Rotation matrix of prismatic joints
R{i}=[cos(theta(i)) -sin(theta(i)) 0;
sin(theta(i))*Calpha(i) cos(theta(i))*Calpha(i) -Salpha(i);
sin(theta(i))*Salpha(i) cos(theta(i))*Salpha(i) Calpha(i)];
end
end
% P
for i=1:N
if rob(i)==0 % Position vector of revolute joints
p{i}=[a(i);-Salpha(i)*d(i);Calpha(i)*d(i)];
elseif rob(i)==1 % Position vector of prismatic joints
p{i}=[a(i);-Salpha(i)*q(i);Calpha(i)*q(i)];
end
end
for i=1:N
pic{i}=p{i}+R{i}*pc{i};
end
poc{1}=pic{1};
for i=2:N
nic=pic{i};
for j=i-1:-1:1
nic=p{j}+R{j}*nic;
end
poc{i}=nic;
end
Pee = poc{N};
% R0{i} stand for 0--> ith framework rotation transition matrix
R0{1}=R{1};
for i=2:N
R0{i}=simplify(R0{i-1}*R{i});
end
Ree = R0{N};
% linear part of jacobians
for i=1:N
Jv{i}=simplify(jacobian(poc{i},q));
end
% angular part of jacobians
if rob(1)==0
Jo{1}=simplify([R0{1}(:,3),zeros(3,N-1)]);
elseif rob(1)==1
Jo{1}=zeros(3,N);
end
for i=2:N
if rob(i)==1
Jo{i}=zeros(3,N);
elseif rob(i)==0
Jo{i}=Jo{i-1};
Jo{i}(:,i)=R0{i}(:,3);
end
end
Jee = [Jv{N};Jo{N}];
% M
for i = 1:size(rob,2)
TEEA{i} = Ic(:,:,i);
end
for i=1:N
Mass{i}=simplify(m(i)*Jv{i}.'*Jv{i}+Jo{i}.'*R0{i}*TEEA{i}*R0{i}.'*Jo{i});
end
M=0;
for i=1:N
M=simplify(Mass{i}+M);
end
% C
for k=1:N
for s=1:N
c(1)=.5*((diff(M(k,s),q(1))+diff(M(k,1),q(s))-diff(M(1,s),q(k)))*dq(1));
for i=2:N
c(i)=.5*((diff(M(k,s),q(i))+diff(M(k,i),q(s))-diff(M(i,s),q(k)))*dq(i))+c(i-1);
end
C(k,s)=simplify(c(N));
end
end
% G
P(1)=m(1)*[0,0,g]*poc{1};
for i=2:N
P(i)=P(i-1)+m(i)*[0,0,g]*poc{i};
end
P=simplify(P(N));
for i=1:N
G(i,:)=simplify(diff(P,q(i)));
end
end2.输入参数生成解析表达式
%输入参数生成解析表达式的参数
clear
clc
alpha=[0, pi/2, 0, 0, -pi/2, pi/2];
a= [0, 0, 0.425, 0.393, 0, 0];
d= [0.1607, 0, 0, 0.1133, 0.099, 0.0936];
theta=[0, pi/2, 0, -pi/2, 0, 0];
dh = [alpha; a; d; theta];
rob=[0,0,0,0,0,0];%0 standard for rotation, 1 standard for translation
N = size(rob);
g = sym('g');
assume(g,'real');
m = sym('m',N);
assume(m, 'real')
Pc = sym('Pc%d%d',[3,6]);
assume(Pc,'real');
Ic = sym('Ic_%d%d_%d',[3,3,6]);
assume(Ic,'real');
for i = 1:size(Ic,3)
Ic(2,1,i)=Ic(1,2,i);
Ic(3,1,i)=Ic(1,3,i);
Ic(3,2,i)=Ic(2,3,i);
end
q = sym('q',N); % 1st group of state variables (joints' angle or position)
assume(q, 'real')
dq = sym('dq',N); % 2nd group of state variables (joints' velocity)
assume(dq, 'real')
[J_L,M_L,C_L,G_L] = myLagrange(dh,rob,Pc,Ic,g,m,q,dq);
%将生成的参数保存至Result_L_test.mat文件中
save ('Result_L_test.mat','J_L','M_L','C_L','G_L');3.拉格朗日方程求解动力学
%输入参数
%inertia_tensor_list 机器人的惯性矩阵
%mass_center_list 机器人质心矩阵
%thetaOffset 角度偏移
%theta 角度
%qd 角速度
%qdd 角加速度
%mass_list 关节质量
function tau_L = LagCom(inertia_tensor_list,mass_center_list,thetaOffset,theta,qd,qdd,mass_list)
rob=[0,0,0,0,0,0];
N = size(rob);
g = sym('g');
assume(g,'real');
m = sym('m',N);
assume(m, 'real')
Pc = sym('Pc%d%d',[3,6]);
assume(Pc,'real');
Ic = sym('Ic_%d%d_%d',[3,3,6]);
assume(Ic,'real');
for i = 1:size(Ic,3)
Ic(2,1,i)=Ic(1,2,i);
Ic(3,1,i)=Ic(1,3,i);
Ic(3,2,i)=Ic(2,3,i);
end
q = sym('q',N); % 1st group of state variables (joints' angle or position)
assume(q, 'real')
dq = sym('dq',N); % 2nd group of state variables (joints' velocity)
assume(dq, 'real')
load('Result_L_test.mat');
sym_sub = [];
num_sub = [];
for i = 1:size(Ic,3)
sym_sub=[sym_sub,m(i)];
num_sub=[num_sub,mass_list(i)];
for j = 1:size(Pc,1)
sym_sub=[sym_sub,Pc(j,i)];
num_sub=[num_sub,mass_center_list(j,i)];
end
for j = 1:size(Ic,1)
for k = 1:size(Ic,2)
sym_sub=[sym_sub,Ic(j,k,i)];
num_sub=[num_sub,inertia_tensor_list(j,k,i)];
end
end
end
G = subs(G_L,[g,sym_sub],[9.8,num_sub]);
M = subs(M_L,sym_sub,num_sub);
C = subs(C_L,sym_sub,num_sub);
J=subs(J_L,Pc,mass_center_list);
save('MCG.mat','M','C','G','J');
tau_L = (double(subs(M,q,(theta'+thetaOffset')'))*qdd' + double(subs(C,[q,dq],[(theta'+thetaOffset')',qd]))*qd' + double(subs(G,q,(theta+thetaOffset))))';
end4.机器人工具箱验证
clear;
clc;
m=[0 10 10 10 10 10];
% DH parameters th d a alpha sigma
L1=Link([ 0 0.1607 0 0 ],'modified');
L2=Link([ 0 0 0 pi/2 ],'modified');L2.offset = pi/2;
L3=Link([ 0 0 0.425 0 ],'modified');
L4=Link([ 0 0.1133 0.393 0 ],'modified');L4.offset = -pi/2;
L5=Link([ 0 0.099 0 -pi/2 ],'modified');
L6=Link([ 0 0.0936 0 pi/2 ],'modified');
thetaOffset=[0, pi/2, 0, -pi/2, 0, 0];
L1.Jm = 0; L2.Jm = 0; L3.Jm = 0; L4.Jm = 0; L5.Jm = 0; L6.Jm = 0;
L1.m = m(1); L2.m = m(2); L3.m = m(3);
L4.m = m(4); L5.m = m(5); L6.m = m(6);
% L1.r =
L1.I = [0 0 0; 0 0 0; 0 0 3.7033];
L2.I = [-2.782 0.086 -0.8413; 0.086 0 -0.1364; -0.8413 -0.1364 2.4741];
L3.I = [-0.6741 -0.3658 0.0373; -0.3658 0 0.0377; 0.0373 0.0377 1.0102];
L4.I = [0.4964 -0.3109 0.1658; -0.3109 0 0.2139; 0.1658 0.2139 -0.1213];
L5.I = [0.0893 -0.0252 -0.0699; -0.0252 0 0.0325; -0.0699 0.0325 0.151];
L6.I = [-0.2332 0.0203 -0.0601; 0.0203 0 0.0477; -0.0601 0.0477 0.0763];
% 质心位置
p10 = [0;0;0];p21 = [3.5349;0.0939;0]; p32 = [1.8417; 0.0746; 0];
p43 = [-0.0475;0.1624;0]; p54 = [-0.0202;-0.0844;0];
p65 = [0.0006; 0.03;0];
L1.r = p10; L2.r = p21; L3.r = p32;
L4.r = p43; L5.r = p54; L6.r = p65;
robot = SerialLink([L1, L2, L3, L4, L5, L6]);
robot.name='My_Robot';
inertia_tensor_list = zeros(3,3,6);
inertia_tensor_list(:,:,1) = L1.I;
inertia_tensor_list(:,:,2) = L2.I;
inertia_tensor_list(:,:,3) = L3.I;
inertia_tensor_list(:,:,4) = L4.I;
inertia_tensor_list(:,:,5) = L5.I;
inertia_tensor_list(:,:,6) = L6.I;
mass_center_list = [p10.';p21.';p32.';p43.';p54.';p65.']';
theta = [pi, 0, pi, 0, 0, pi]*pi/180;
qd = [1 1 pi 1 1 1]; qdd = [1 1 1 pi 1 1];
tau_L = LagCom(inertia_tensor_list,mass_center_list,thetaOffset,theta,qd,qdd,m');
tau_N = myNewtonEuler(theta*180/pi, qd', qdd',m);
tau = robot.rne(theta, qd, qdd, [0 0 9.8]);
[tau_L;tau_N;tau]
注意:使用机器人工具箱验证之前,先调用第二个matlab代码生成拉格朗日方程的解析形式,时间比较长请耐心等待,博主跑了大概30分钟。
5.MATLAB计算结果
当theta = [pi, 0, pi, 0, 0, pi]*pi/180; qd = [1 1 pi 1 1 1]; qdd = [1 1 1 pi 1 1];时结果如下,第一行为拉格朗日方程计算的结果,第二行为牛顿欧拉递推式的结果,第三行为机器人工具箱的结果。

当theta = [pi, 0, pi/2, 0, pi/2, pi]*pi/180; qd = [1 1 pi 1 pi/2 1]; qdd = [1 pi/2 1 pi 1 1];时结果如下。



















 3384
3384

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









