







机器人动力学的两种典型方法:拉格朗日方程和牛顿欧拉方程。
拉格朗日方程的本质:基于系统的总能量去计算驱动力;
牛顿欧拉方程的本质:基于运动和力的关系去计算驱动力,牛顿方面出手的是牛顿方程(即牛顿第二定律,描述平移运动);欧拉方面出手的是欧拉方程(描述转动运动)。
本文仅介绍拉格朗日法。首先,拉格朗日动力学方程可以表述为:
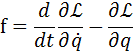
其中,代表广义力(之所以说广义,因为可以是力或者力矩),
代表广义坐标(可以是角度或者长度)。L是拉格朗日函数,定义为整个系统的动能减去势能。拉格朗日动力学方程的目标就是求解那个外力f。拉格朗日方程的推导过程在多数动力学教材中都有,如果你从量纲去理解就比较简单,第一项就是“能量/(时间·速度)”,即力的量纲;第二项∂L/∂q就是“能量/位移”,也是力的量纲。
举例1:只能在垂直方向移动的质点
一个受到约束而只能在垂直线上移动的质量为m的质点 该质点的位形空间便是竖直线,因而广义坐标的一个自然选择便是质点的高度q = h,规定正方向向上。重力mg是向下作用,外界施加的作用力f按照默认方向。如果我们仅仅根据牛顿第二定律,即F=ma,不参考拉格朗日方程,也可以得出质点的动力学方程:
![]()
![]()
好,然后我们用拉格朗日动力学方程来推导。首先拉格朗日函数等于
![]()
然后,拉格朗日动力学方程求外力:

由于包含![]() 的项只能对
的项只能对![]() 求导,对h求导为0;包含h的项只能h求导,对
求导,对h求导为0;包含h的项只能h求导,对![]() 求导为0。所以
求导为0。所以

可以看到和牛顿第二定律的推导结果一致!
举例2:受到重力和关节力矩的平面2R开链机器人
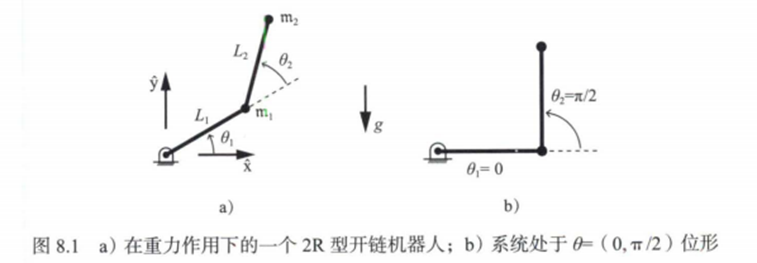
(附图来自《现代机器人学》)
该运动链在xy平面内运动,重力g则作用于-y方向。在导出动力学方程之前,我们必须指定所有连杆的质量和惯量属性。为了保持模型的简明,两个连杆被视为各自质量集中于各连杆末端的点质量m1和 m2。 按照我的习惯,我想先求一下拉格朗日函数:

这里稍微轻松一下,我们把几个速度先表示出来:
![]()
![]()
![]()
![]()
然后把这几个公式带回到拉格朗日函数中:
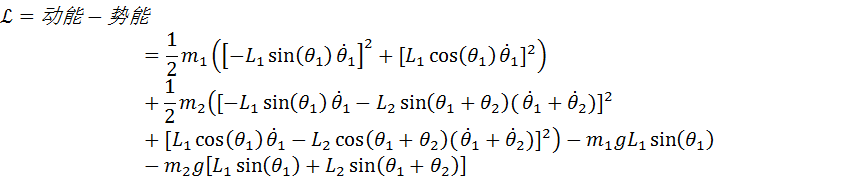
(1)
别急,上式中我已经把速度都带进去了,可以看到这个式子已经比较恶心的。
这里将产生本例最大的疑问,外力有哪些?如何求?
答:首先,外力只有两个,第一关节力矩τ1和第二关节力矩τ2,这里不考虑末端受到的冲击力。如果只考虑关节力矩,那么拉格朗日公式的意义就显然了,就是让两关节获得需要的角度和角速度,来求得对应关节力矩的大小。动力学方程只需要对广义关节求偏导即可:
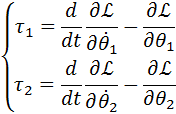 (2)
(2)
将公式(1)代入到公式(2),便可得:
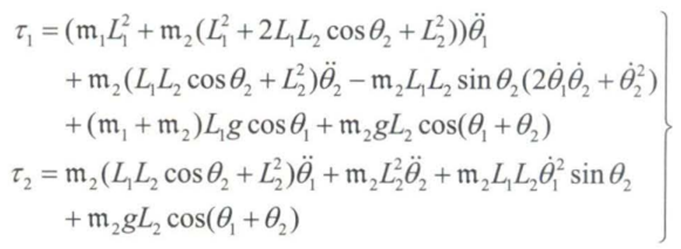
上式作为关节力矩结果已经完全可以,但是作为平面2R开链机器人的动力学方程,显然还比较杂乱。
因此,将上式化简一下,可得:

(3)
式(3)就是平面2R开链机器人的动力学方程,是以拉格朗日方程为工具进行求算的。
将矩阵块进行总结,式(3)的普遍性规律就是著名的机器人动力学方程:
![]() (4)
(4)
式(4)对应到平面2R开链机器人,则



![]() 是质量矩阵,其中元素都是和角度θ相关的参数,没有角速度和角加速度项。准确的说,
是质量矩阵,其中元素都是和角度θ相关的参数,没有角速度和角加速度项。准确的说,![]() 是转动惯量的量纲,
是转动惯量的量纲,![]() 是力矩的量纲。
是力矩的量纲。
![]() 是为包含科里奥利和向心力矩的向量。包含
是为包含科里奥利和向心力矩的向量。包含![]() 的二次项称为向心项,而包含
的二次项称为向心项,而包含![]() 的二次项则称为科里奥利项。
的二次项则称为科里奥利项。
![]() 是包含重力矩的向量,不难看出
是包含重力矩的向量,不难看出![]() 中的项也是力矩的量纲。
中的项也是力矩的量纲。
机器人动力学方程(4)对于包含转动关节的串联运动链而言,通常都是正确的,而不只适用于2R型机器人。

















 5599
5599

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









