






MATLAB并联机器人Stewart平台仿真simulink simscape 运动学
ID:13199667838412167
爱小马的海盐大傻
MATLAB并联机器人Stewart平台仿真技术
引言:
随着机器人技术的不断发展,机器人在工业自动化和生活服务领域的应用越来越广泛。并联机器人是其中一种重要的机器人型号,其具有高精度、高稳定性和高载荷能力等优势。在并联机器人的研发和应用过程中,仿真技术是一种非常重要的手段。本文将聚焦于MATLAB在并联机器人Stewart平台仿真中的应用,特别关注使用Simulink和Simscape进行运动学仿真的方法。
-
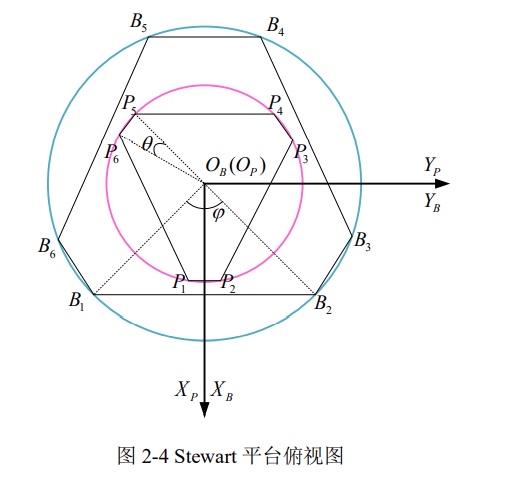
Stewart平台的介绍
Stewart平台是一种由六个自由度驱动的并联机构,由六个可调长度的连杆连接上平台和基座,通过改变连杆的长度,可以控制平台相对于基座的位置和姿态。Stewart平台具有结构简单、运动范围广和工作稳定等优点,广泛应用于飞行模拟器、航天工程和医学仿真等领域。 -
MATLAB在Stewart平台仿真中的应用
MATLAB是一种强大的数学计算和仿真软件,在并联机器人的仿真研究中有广泛应用。Simulink是MATLAB中的一个重要工具,可用于建立系统级模型和进行动态仿真。Simscape是MATLAB中的另一个工具箱,提供了建立物理模型和进行多领域仿真的功能。 -
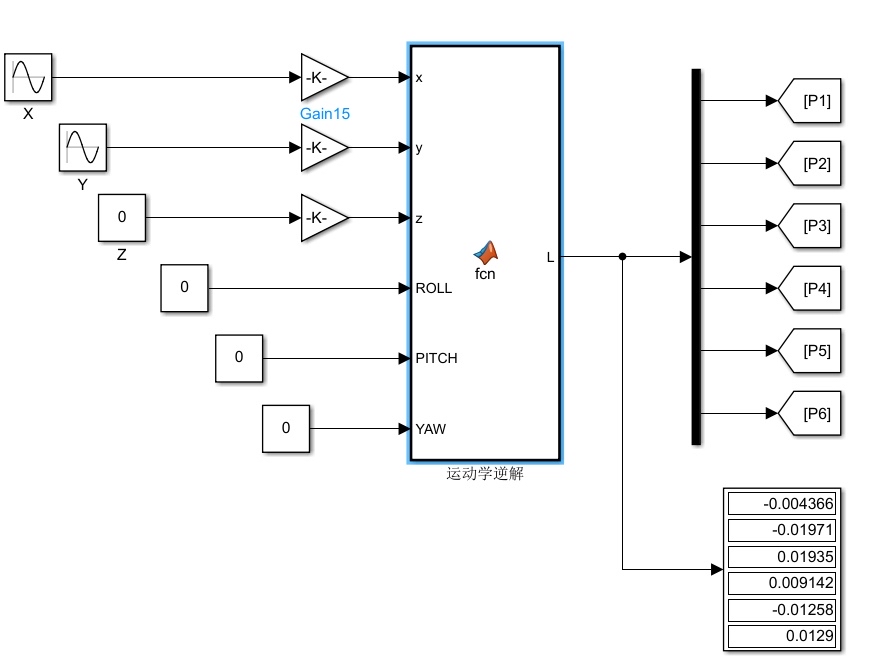
基于Simulink的Stewart平台运动学仿真
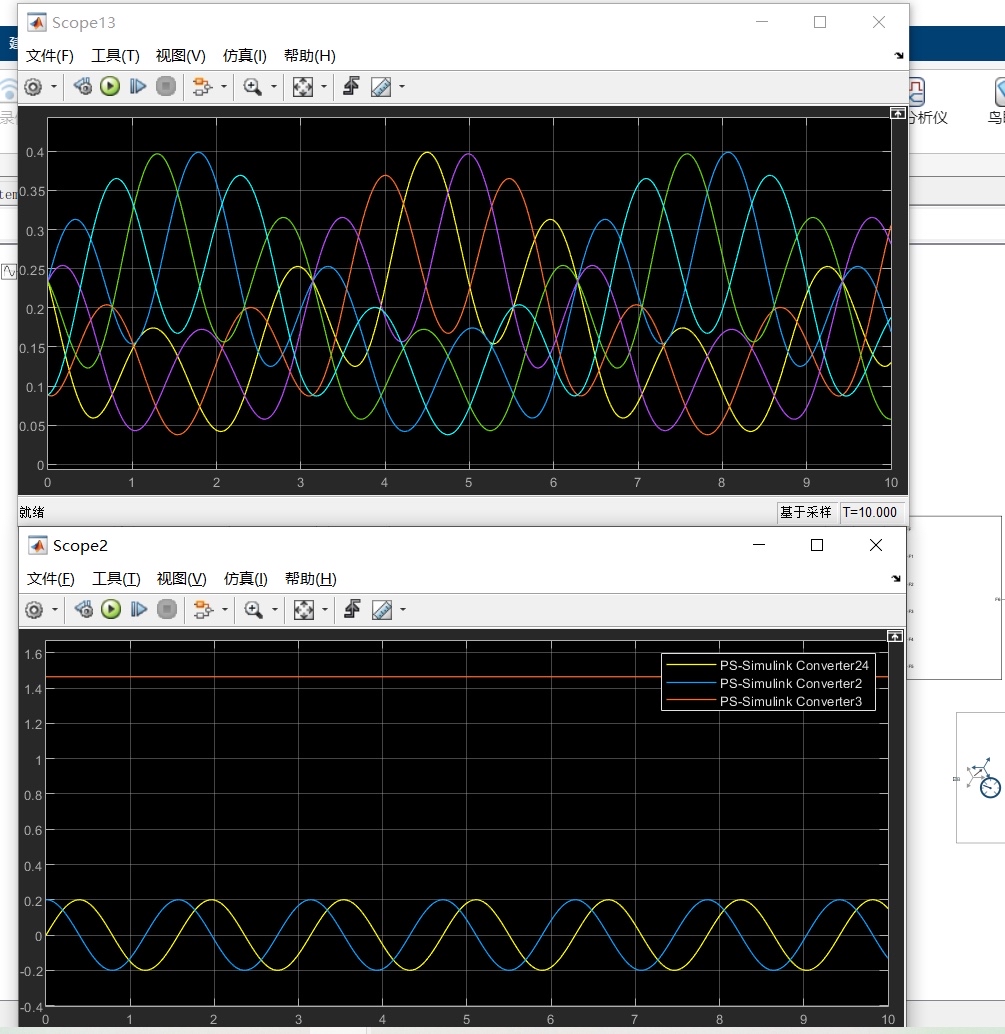
在Stewart平台的运动学仿真中,Simulink提供了一个直观且灵活的建模环境。通过构建平台和基座的连接关系,并设置连杆的长度和初始位置,可以实现对Stewart平台的运动控制仿真。在仿真过程中,可以观察平台的运动轨迹和各个关节的角度变化,以评估系统的性能和稳定性。 -
基于Simscape的Stewart平台动力学仿真
除了运动学仿真外,Simscape还提供了进行动力学仿真的功能。通过在模型中添加力和力矩的输入,可以模拟外部扰动对Stewart平台的影响。同时,还可以通过调整连杆的弹性和阻尼参数,分析不同工况下平台的响应性能,并优化控制策略。 -
结论
本文介绍了MATLAB在并联机器人Stewart平台仿真中的应用。通过使用Simulink和Simscape,可以实现对Stewart平台的运动学和动力学仿真。仿真结果可以为机器人的设计和控制提供重要参考,减少实际测试的成本和风险。随着MATLAB的不断发展和完善,相信在未来的研究中,它
以上相关代码,程序地址:http://wekup.cn/667838412167.html


















 211
211

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









