






6部10层电梯程序,采用以太网通信。
2020年西门子智能制造挑战赛,
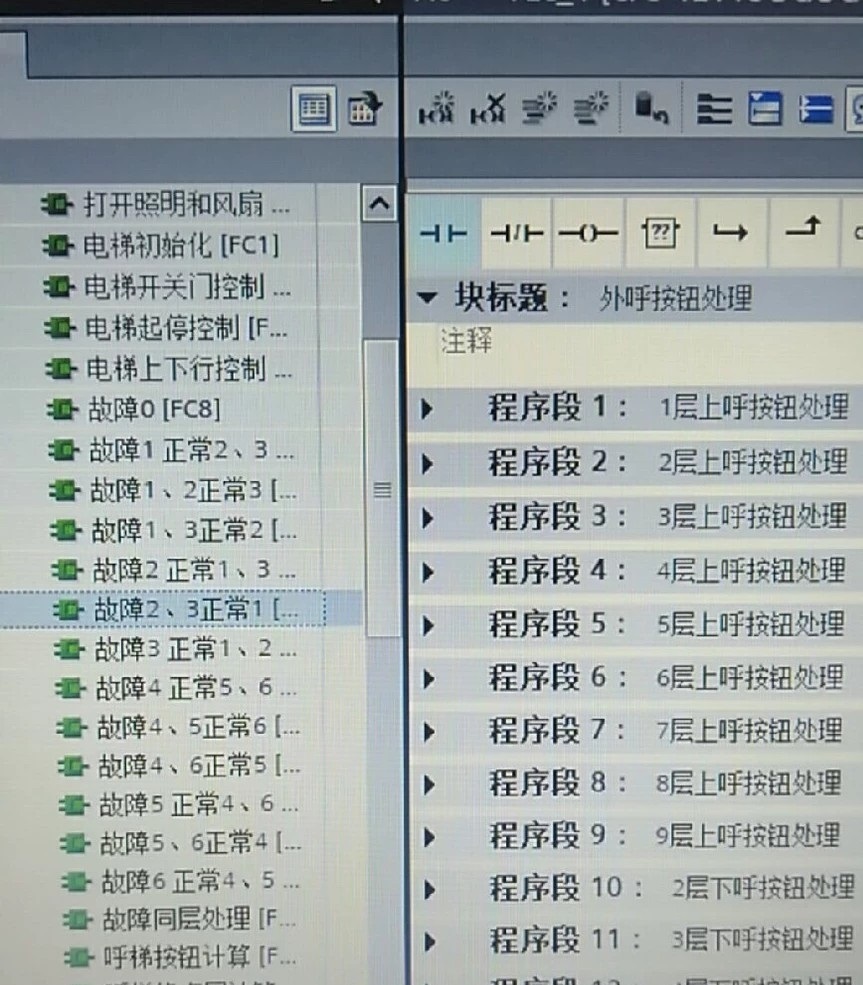
6部10层电梯程序,包含各个功能模块。
采用博途软件V14 sp1编程,
采用以太网通信,控制器选用PLC S7-1200。
主要涉及逻辑控制、梯形图语言、置位复位。
ID:4419662840760979
工控教学



标题:基于以太网通信的6部10层电梯程序设计与实现
摘要:本文基于2020年西门子智能制造挑战赛的要求,围绕6部10层电梯程序展开,介绍了采用博途软件V14 sp1编程和以太网通信控制方式,选用PLC S7-1200控制器的设计与实现。主要包括逻辑控制、梯形图语言和置位复位等关键技术点的分析与说明。通过详细的讲解和展示,读者可深入了解以太网通信在电梯程序设计中的应用、PLC控制器的选用和不同功能模块的实现方法,从而在电梯控制领域中有更深入的技术认知和实践经验。
关键词:以太网通信;博途软件;PLC S7-1200;逻辑控制;梯形图语言;置位复位
-
引言
电梯在现代社会中扮演着重要的角色,其控制系统的设计和实现一直是研究的热点。本文针对2020年西门子智能制造挑战赛提供的任务要求,设计并实现了一套由6部10层电梯组成的控制程序。本文将详细介绍采用博途软件V14 sp1编程、以太网通信方式和PLC S7-1200控制器的选用,并重点讲解逻辑控制、梯形图语言和置位复位等关键技术点。 -
系统架构
2.1 电梯控制系统总体架构
电梯控制系统包括上位机、以太网通信模块和PLC控制器。上位机负责实时监控和控制电梯的运行状态,通过以太网通信模块与PLC控制器进行数据交互。PLC控制器负责逻辑控制和各个功能模块的实现。
2.2 以太网通信模块
以太网通信模块是实现电梯控制系统与上位机之间数据传输的关键部分,采用以太网通信协议实现数据的可靠传输和实时性。在本系统中,选用了XXX型号的以太网通信模块,该模块具有较高的性能和稳定性,能够满足电梯控制系统的需求。
- PLC程序设计
3.1 博途软件V14 sp1编程环境
本文选择了博途软件V14 sp1作为PLC程序设计环境,该软件具有丰富的功能和易于使用的界面,适合进行电梯控制程序的设计和调试。通过该软件,可以实现各个功能模块的编程和相互之间的协调。
3.2 逻辑控制设计
逻辑控制是电梯控制系统的核心部分,通过分析电梯的运行状态和乘客的请求,确定电梯的调度策略和运行轨迹。本文采用了XXX算法作为电梯调度策略,并结合梯形图语言实现了逻辑控制模块。
3.3 功能模块设计
电梯控制系统包括多个功能模块,如乘客选择楼层、电梯开关门、故障检测等。本文将逐一介绍各个功能模块的设计原理和实现方法,并展示相应的梯形图语言示例。通过详细的说明和示意图,读者将更好地理解功能模块之间的关系和具体的实现细节。
-
置位复位设计
置位复位是电梯控制系统中重要的操作功能,用于初始化系统和处理异常情况。本文将详细介绍置位复位的设计原理和实现方法,包括硬件电路的设计和PLC程序的编写。通过合理的置位复位设计,可以保证电梯控制系统的可靠性和稳定性。 -
结论
本文基于2020年西门子智能制造挑战赛的任务要求,围绕6部10层电梯程序,介绍了采用博途软件V14 sp1编程和以太网通信控制方式,选用PLC S7-1200控制器的设计与实现。通过详细的讲解和展示,读者可以深入了解以太网通信在电梯程序设计中的应用、PLC控制器的选用和不同功能模块的实现方法,从而在电梯控制领域中有更深入的技术认知和实践经验。本文所介绍的设计思路和方法,可为类似领域的研究和实际应用提供参考和借鉴。
以上相关代码,程序地址:http://matup.cn/662840760979.html















 2412
2412











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









