






matlab程序,改进人工势场法模拟机器人路径规划与避障,障碍物的个数和坐标可以手动修改。
程序采用了模糊规则与人工势场算法相结合的方式来实现路径规划与避障。
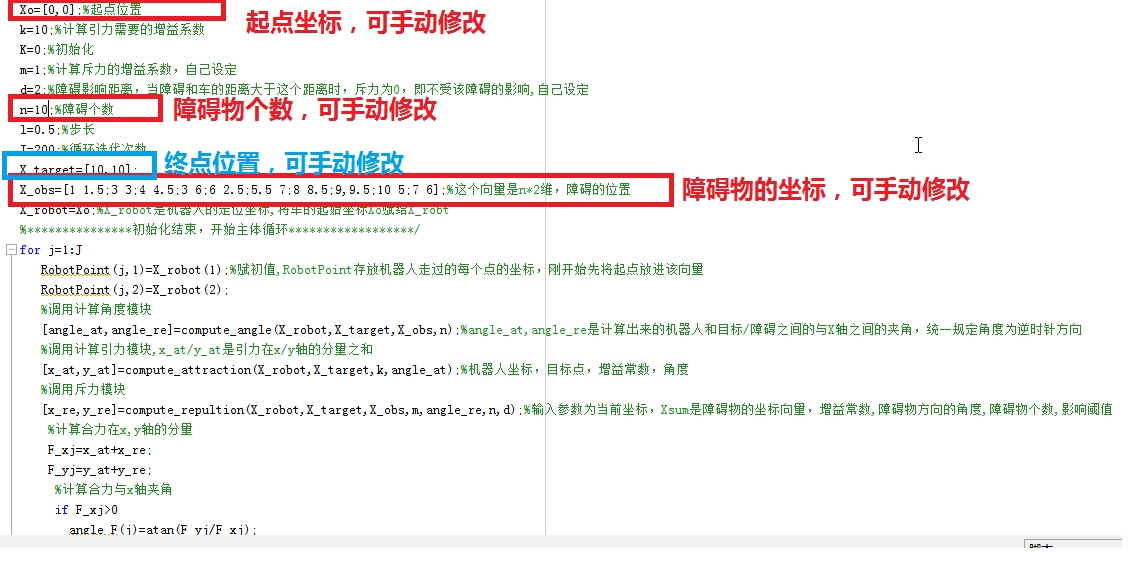
起点坐标,终点坐标,障碍物坐标,障碍物个数都可以在程序里直接改。
ID:3960662710091016
专业算法工程师
标题:改进人工势场法模拟机器人路径规划与避障
摘要:
本文介绍了一种改进的人工势场法路径规划与避障算法,使用Matlab编写程序实现。该算法结合了模糊规则与人工势场算法,能够灵活地适应不同的起点坐标、终点坐标以及障碍物坐标和个数。通过手动修改参数,可以实现对机器人路径规划与避障的模拟。
-
引言
机器人路径规划与避障一直是机器人领域的研究热点之一。人工势场法是一种常用的路径规划与避障方法,它通过定义势能场来模拟机器人周围的环境,以达到规划安全路径的目的。然而,传统的人工势场法在处理复杂场景时存在问题,例如局部最小点问题和震荡问题。为了解决这些问题,本文提出了一种改进的人工势场法,结合了模糊规则,以提高路径规划与避障的效果。 -
方法
2.1 人工势场算法
人工势场算法将机器人看作一个质点,通过定义势能场来模拟机器人周围的环境。势能场由吸引势和斥力势组成。吸引势使得机器人朝目标点移动,而斥力势使得机器人避开障碍物。然后,计算机器人在势能场中受到的合力,通过控制机器人沿合力方向移动,实现路径规划与避障。
2.2 模糊规则
传统的人工势场法在处理复杂场景时存在一些问题,例如局部最小点问题和震荡问题。为了解决这些问题,本文引入了模糊规则。模糊规则通过处理模糊信息,使得机器人在遇到复杂场景时可以做出更准确的决策。在路径规划过程中,我们通过定义一系列模糊规则,根据机器人与目标点、障碍物之间的距离和角度等信息,来决定机器人的移动方向和速度。
-
实验结果
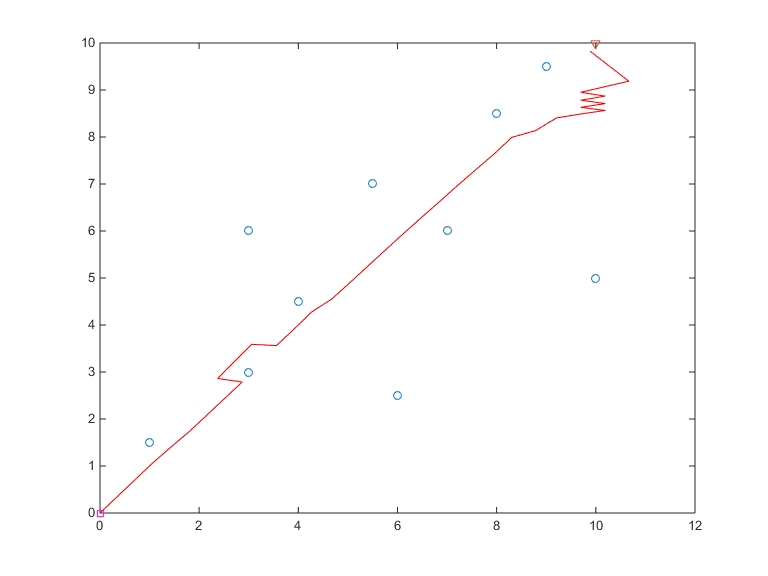
通过使用Matlab编写程序,我们实现了改进的人工势场法路径规划与避障算法。根据程序内部的注释,我们可以手动修改起点坐标、终点坐标、障碍物坐标和障碍物个数。通过对不同场景进行模拟实验,我们发现改进的算法能够有效地规划出安全的路径并避开障碍物。在复杂场景下,模糊规则的引入可以有效提高路径规划的准确性和鲁棒性。 -
结论
本文提出了一种改进的人工势场法路径规划与避障算法。该算法通过结合模糊规则,可以适应不同的起点坐标、终点坐标以及障碍物坐标和个数。实验证明,改进的算法能够有效地规划出安全路径,并避开障碍物。这为机器人路径规划与避障提供了一种新的思路和方法。
关键词:人工势场法、路径规划、避障、模糊规则、Matlab编程
以上相关代码,程序地址:http://matup.cn/662710091016.html















 548
548











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









