









如果判断点是否在凸多边形内,则有多种方法,方法简单,计算速度也快,直接使用物理引擎做判断也行
但实际问题中遇到的多边形不一定是凸多边形,它可能是凹边行或者复合多边形
判断一个点在多边形内或多边形外,射线法是个不错的选择
射线法,判断一点是否在多边形内或多边形外,只要从这点起,作一条射线,例如,沿x向直到负无穷,如果越过的边数是单数,这点就在多边形内,越过的边数是偶数,这点就在多边形外。
如图
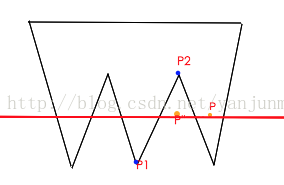
1)如果射线正好穿过P1或者P2,那么这个交点会被算作2次,处理办法是如果P的从坐标与P1,P2中较小的纵坐标相同,则直接忽略这种情况
2)如果射线水平,则射线要么与其无交点,要么有无数个,这种情况也直接忽略。
3)如果射线竖直,而P0的横坐标小于P1,P2的横坐标,则必然相交。
4)再判断相交之前,先判断P是否在边(P1,P2)的上面,如果在,则直接得出结论:P再多边形内部
计算X轴坐标

//计算交点逻辑
tanα = b / c;
tanα = d / a;
d = b*a / c;
代码:
bool HelloWorld::IsPointInsideShape(Vec2 pos,std::vector<Vec2>& m_vAllShape)
{
int nCross = 0;
int nCount = (int)m_vAllShape.size();
Vec2 p = pos;
for (int i = 0; i < nCount; i++)
{
Vec2 p1 = m_vAllShape[i];
Vec2 p2 = m_vAllShape[(i + 1) % nCount];
// 求解 y=p.y 与 p1p2 的交点
if (p1.y == p2.y)
{// p1p2 与 y=p0.y平行
continue;
}
if (p.y < MIN(p1.y, p2.y))
{// 交点在p1p2延长线上
continue;
}
if (p.y >= MAX(p1.y, p2.y))
{// 交点在p1p2延长线上
continue;
}
// 求交点的 X 坐标 --------------------------------------------------------------
double x = (double)(p.y - p1.y) * (double)(p2.x - p1.x) / (double)(p2.y - p1.y) + p1.x;
if (x > p.x){
nCross++; // 只统计单边交点
}
}
// 单边交点为偶数,点在多边形之外
// if (nCross % 2 == 1) {
// log("在多边形内");
// }
// if (nCross % 2 == 0) {
// log("在多边形外");
// }
return (nCross % 2 == 1);
}

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









