







Protocol Buffer 是google 公司开发的结构化数据序列化/反序列化方法。它比json和XML 效率更高。我们在ModularIoT 中使用Protocol buffer 实现消息体的编解码。当然也希望在微处理器cortex-M 的微服务器中也可以使用protobuf的编解码。网络上看见一个Protocol Buffer Nano 的项目。而且在Mbed OS 社区也发现了相关的项目。
ubuntu上安装 protoc-c 工具
apt-get install protobuf-c-compiler
编写proto 文件
syntax = "proto3";
package websocket;
message WebsocketMessage {
string Topic =1;
bytes Body=2;
}
message GenericRPC {
string Method =1;
string To=2;
string From =3;
int32 Code=4;
bytes parameters=5;
}
下载包 nanopb 包
nanopb 并不是标准的protobuf 所以要下载专用的程序包 nanopb
git clone https://github.com/nanopb/nanopb.git
protobuf nano 要使用特殊的转换器,当你下在了 protobufnano 包后,还需要安装
安装python-protobuf
sudo apt-get update
sudo apt-get install python-protobuf
转换过程
protoc –osimple.pb simple.proto
python ../.. /generator/nanopb-generator.py simple.bp
遇到的问题
在这过程中,发现protoc 的版本和 protobuf-python 的版本不一致。解决的方法很简单,使用下面的命令:
sudo pip install –U protobuf
完美地解决了问题
protobuf nano 的使用
Mbed OS 的社区中有一个nanopb-test 程序。我们对它进行的部分的修改。
#include "mbed.h"
#include "pb.h"
#include "pb_encode.h"
#include "pb_decode.h"
#include "threeaxis.pb.h"
Serial pc(USBTX, USBRX);
int main() {
pc.baud(115200);
gyro_message GyroOut, GyroIn;
uint8_t bufferout[150];
uint8_t bufferin[150];
GyroOut.X=1.1;
GyroOut.Y=2.1;
GyroOut.Z=3.1;
pc.printf("starting..\r\n");
while(1){
GyroOut.X+=0.1;
GyroOut.Y+=0.2;
GyroOut.Z+=0.3;
pc.printf("Raw values: x: %4.2f, y: %4.2f, z: %4.2f\r\n", GyroOut.X, GyroOut.Y, GyroOut.Z); //print values before encoding
pb_ostream_t streamout = pb_ostream_from_buffer(bufferout, sizeof(bufferout));
if (pb_encode(&streamout, gyro_message_fields, &GyroOut)) { //encode message
pc.printf("encoded\n");
}
else { //print error message if encoding fails
pc.printf("Encoding failed: %s\n", PB_GET_ERROR(&streamout));
return 0;
}
pc.printf("protopb length =%d\n",streamout.bytes_written);
for(int i=0;i<=150;i++) //copy output buffer to input buffer
bufferin[i]=bufferout[i];
pc.printf("decoding...\r\n");
pb_istream_t streamin = pb_istream_from_buffer(bufferin, sizeof(bufferin)); //create input stream
if (pb_decode(&streamin, gyro_message_fields, &GyroIn)) { //decode message
pc.printf("Decoded values: x: %4.2f, y: %4.2f, z: %4.2f\r\n", GyroIn.X, GyroIn.Y, GyroIn.Z); //print decoded values
}
else { //print error message if decoding fails
pc.printf("Decoding failed: %s\n", PB_GET_ERROR(&streamin));
return 0;
}
wait(2);
}
}
遇到了新的问题
1 使用上面提及的方法传送到mbed 的项目中,发现版本不同,无法编译
于是将nanopb 包中的代码传送到mbed 项目中。它们是
编译通过了
2 如果proto 文件中的结构造含有字符串,那么要使用 和proto 文件名一致的options 文件来规定字符串的最大长度。但是不知道 nanopb_generator.py 的options 如何标志,好在还有一个方法。就是在proto 文件中标志nano 的长度
syntax = "proto3";
package websocket;
import "nanopb.proto";
message WebsocketMessage {
string Topic =1 [(nanopb).max_size = 32];
bytes Body=2 [(nanopb).max_size = 256];
}
message GenericRPC {
string Method =1 [(nanopb).max_size = 32];
string To=2 [(nanopb).max_size = 32];
string From =3 [(nanopb).max_size = 32];
int32 Code=4;
bytes Parameters=5 [(nanopb).max_size = 240];
}注意:import nanopb.proto, nanopb.proto 文件在nanobp 包中 nanopb/generator/proto 中,可以直接将这个文件Copy 到你的当前目录中。
这样便成功了
我的例中,这个例子实现了protobuf 的分层嵌套。GenericRPC 嵌入在WebsocketMessage 中,要分两步编解码。感兴趣的就慢慢看吧,我是调通了的。
#include "mbed.h"
#include "pb.h"
#include "pb_encode.h"
#include "pb_decode.h"
#include "websocket.pb.h"
Serial pc(USBTX, USBRX);
int main() {
pc.baud(115200);
websocket_WebsocketMessage websocketMessage,websocketMessage_in;
websocket_GenericRPC genericRPC,genericRPC_in;
uint8_t bufferout[512];
uint8_t bufferin[512];
uint8_t pbuf[4];
pbuf[0]=0x00;
pbuf[1]=0x01;
strcpy(genericRPC.Method,"modbus.query");
strcpy(genericRPC.From,"microserver2");
strcpy(genericRPC.To,"weatherstation2");
genericRPC.Code=0;
genericRPC.Parameters.size=4;
memcpy(&genericRPC.Parameters.bytes,pbuf ,4);
pc.printf("starting encode..\r\n");
while(1){
//encode genericRPC
pb_ostream_t streamout = pb_ostream_from_buffer(bufferout, sizeof(bufferout));
if (pb_encode(&streamout, websocket_GenericRPC_fields, &genericRPC)) { //encode message
pc.printf("GenericRPCencoded\n");
}
else { //print error message if encoding fails
pc.printf("Encoding GenericRPC failed: %s\n", PB_GET_ERROR(&streamout));
return 0;
}
pc.printf("genericRPC length =%d\n",streamout.bytes_written);
strcpy(websocketMessage.Topic,"weatherstation2.RPC");
websocketMessage.Body.size=streamout.bytes_written;
memcpy(&websocketMessage.Body.bytes,bufferout ,streamout.bytes_written);
// encode websocketMessage
streamout = pb_ostream_from_buffer(bufferout, sizeof(bufferout));
if (pb_encode(&streamout, websocket_WebsocketMessage_fields, &websocketMessage)) { //encode message
pc.printf("WebsocketMessage\n");
} else { //print error message if encoding fails
pc.printf("Encoding WebMessage failed: %s\n", PB_GET_ERROR(&streamout));
return 0;
}
pc.printf("websocketMassage length =%d\n",streamout.bytes_written);
// for(int i=0;i<streamout.bytes_written;i++) //copy output buffer to input buffer
// bufferin[i]=bufferout[i];
memcpy(bufferin,bufferout,streamout.bytes_written);
pc.printf("decoding...\r\n");
pb_istream_t streamin = pb_istream_from_buffer(bufferin, streamout.bytes_written); //create input stream
if (pb_decode(&streamin, websocket_WebsocketMessage_fields, &websocketMessage_in)) { //decode message
pc.printf("Decoded websockerMessage ,Topic:%s\n",websocketMessage_in.Topic);
int bodylength=websocketMessage_in.Body.size;
memcpy(bufferin,websocketMessage_in.Body.bytes,bodylength);
streamin = pb_istream_from_buffer(bufferin, bodylength);
if (pb_decode(&streamin, websocket_GenericRPC_fields, &genericRPC_in)) {
pc.printf("Decoded Method:%s,From:%s,To:%s\n",genericRPC_in.Method,genericRPC_in.From,genericRPC_in.To ); //print decoded values
} else {
pc.printf("Decoding GenericRPC failed: %s\n", PB_GET_ERROR(&streamin));
return 0;
}
}
else { //print error message if decoding fails
pc.printf("Decoding WebsocketMessage failed: %s\n", PB_GET_ERROR(&streamin));
return 0;
}
wait(2);
}
}
在STM32 的USB 串口显示的内容为
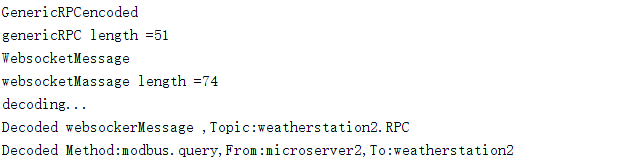
当你搞不定时,哪怕是网路上的垃圾,对你也许就是救命稻草。但愿对你有所帮助。















 2291
2291











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









