







 本教程详细介绍如何使用ContextCapture软件从照片生成三维模型的过程。包括准备阶段、照片拍摄技巧、软件设置及模型生成步骤等关键信息。
本教程详细介绍如何使用ContextCapture软件从照片生成三维模型的过程。包括准备阶段、照片拍摄技巧、软件设置及模型生成步骤等关键信息。
一、准备和设置
1、准备
单反相机:(没有相机用手机拍照也可以测试)
软件:CC(ContextCapture),版本:CCCenter-partial-10.16.0.75.x64-en.msi
软件下载地址,也阔以自己在网上下载:
链接:https://pan.baidu.com/s/1m-TktbSsysCWFyI5q3bjfw
提取码:5lsc
素材下载地址:
链接:https://pan.baidu.com/s/1y8wu9f6KpjCg4zZBThmgzw
提取码:r5gh
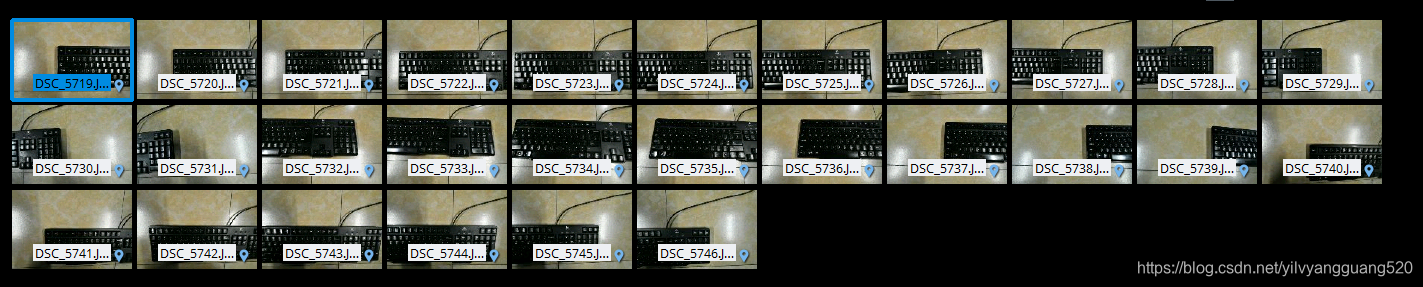
2、拍照
尽量多拍几张,保证重叠度在65%之上吧,不管是俯拍还是斜拍,重叠度都要够
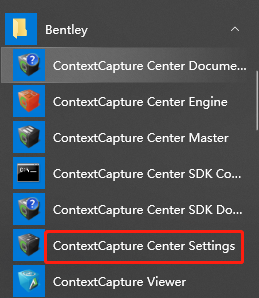
3、引擎设置等等

4、打开ContextCapture Center Engine,用于跑模型的引擎
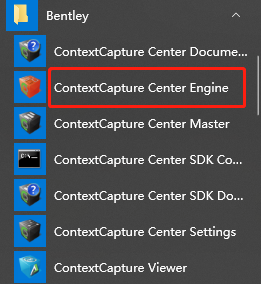
开启之后,里面长这样
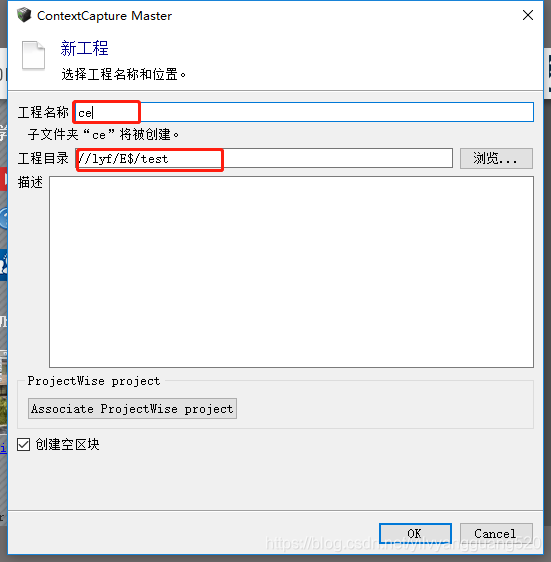
5、新建工程
工程名称和目录尽量不要中文,不容易出错
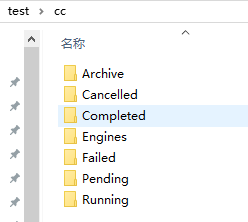
6、设置
这个目录和之前的引擎设置是一样的

二、数据和模型生成
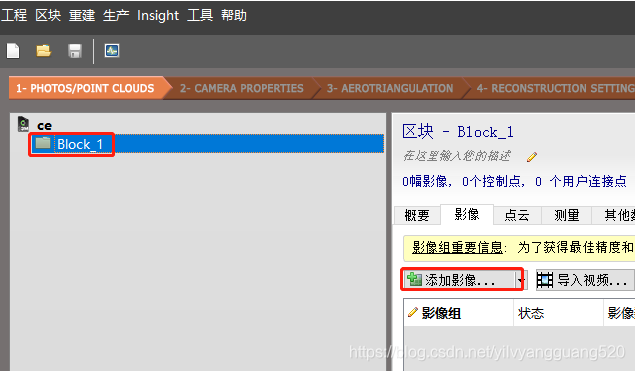
1、导入照片
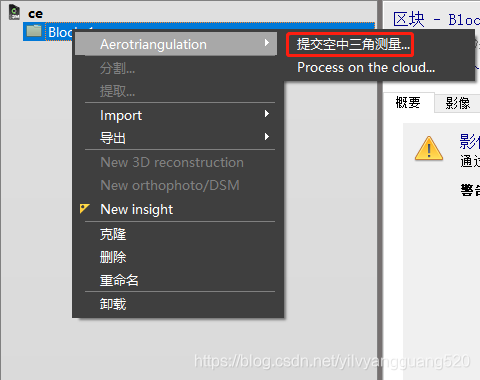
2、空三计算
一切设置默认
浏览一下空三成果,照片基本上是能够匹配上的

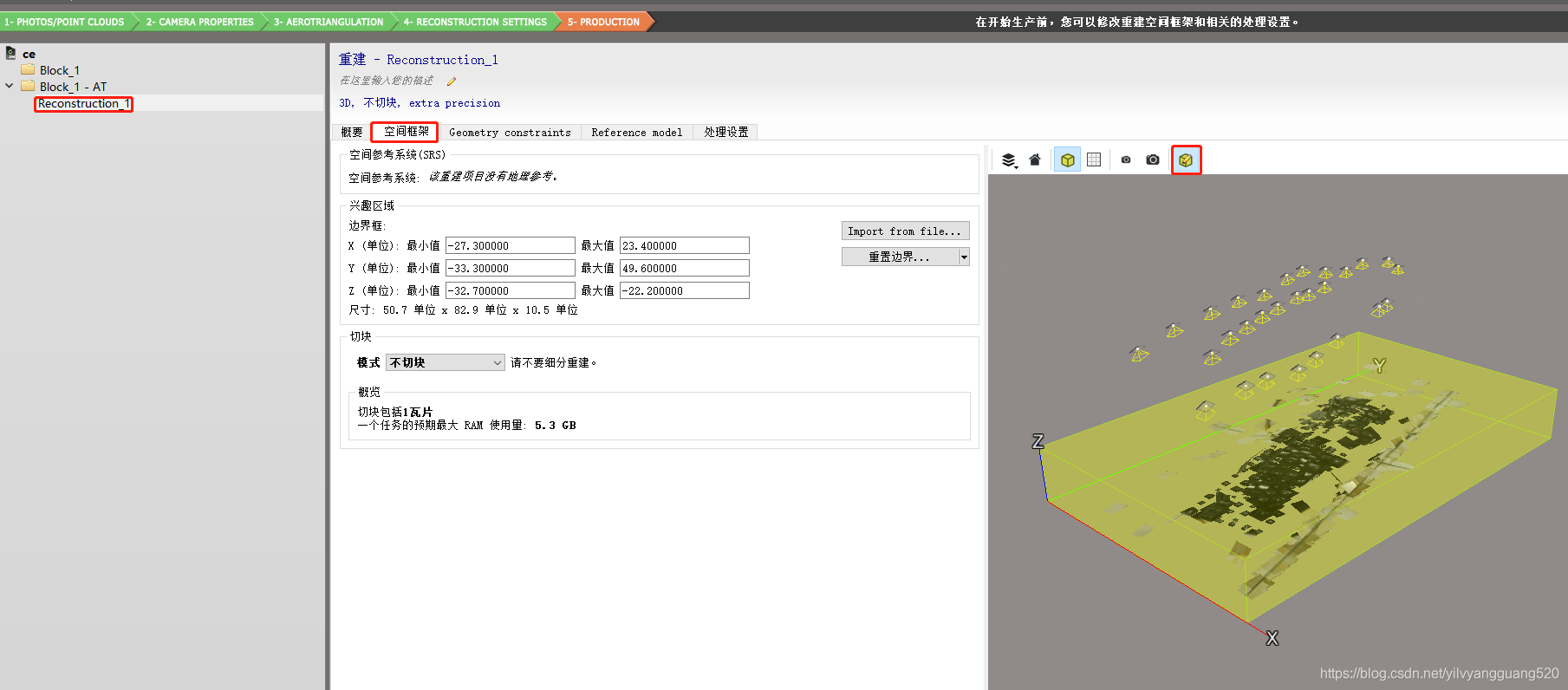
3、重建项目
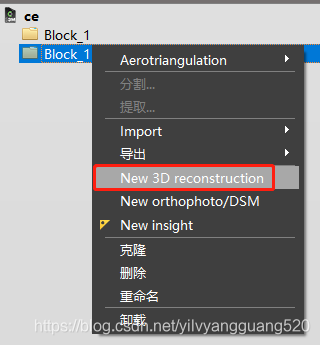
调整下模型范围,左键放到框架上,按住移动即可,左键点到别处可以旋转
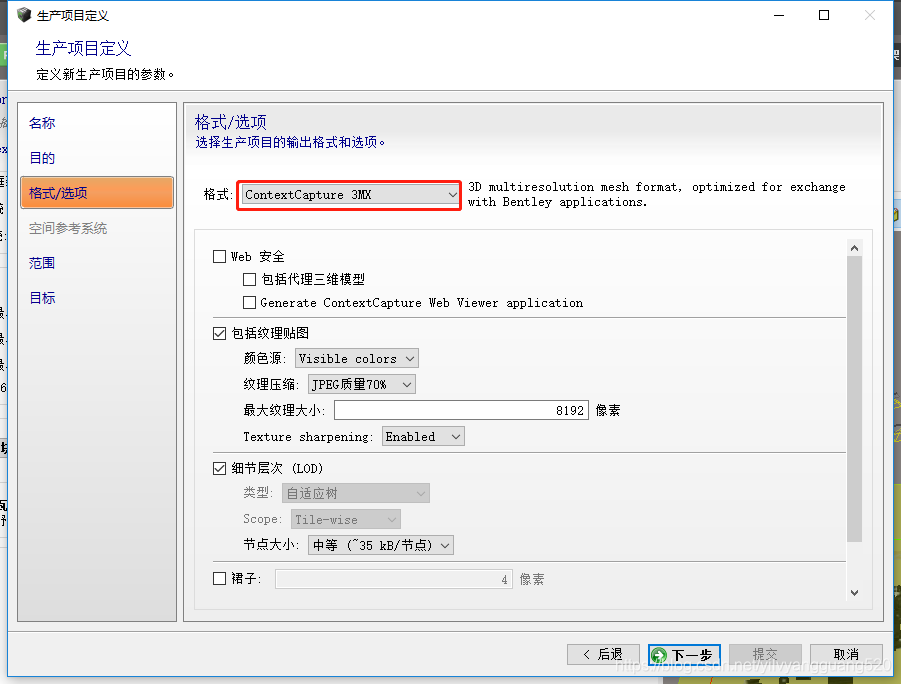
4、生成
一切设置默认
这个格式后续可以直接打开浏览
5、浏览模型




















 2334
2334

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











