







 单位要开展自动驾驶map消息集工作,有相应标准协议。博主整理相关含义,助力解读map协议,聚焦于自动驾驶信息技术领域。
单位要开展自动驾驶map消息集工作,有相应标准协议。博主整理相关含义,助力解读map协议,聚焦于自动驾驶信息技术领域。
前言
| MAP | MAP消息即地图消息,由路侧单元RSU(RodeSide Unit)广播,向车辆传递局部区域的地图信息。包括局部区域路口消息、路段消息、车道消息、道路之间的连接关系等。用于传递多种类型的地理道路信息,内容应该包括:复杂交叉路口描述,路段描述,高速曲线轮廓,车道线信息等。MAP信息可能会与SPAT消息关联使用。对于场景算法的设计是重要的消息来源。 |
最近单位要搞自动驾驶map消息消息集,标准协议如下
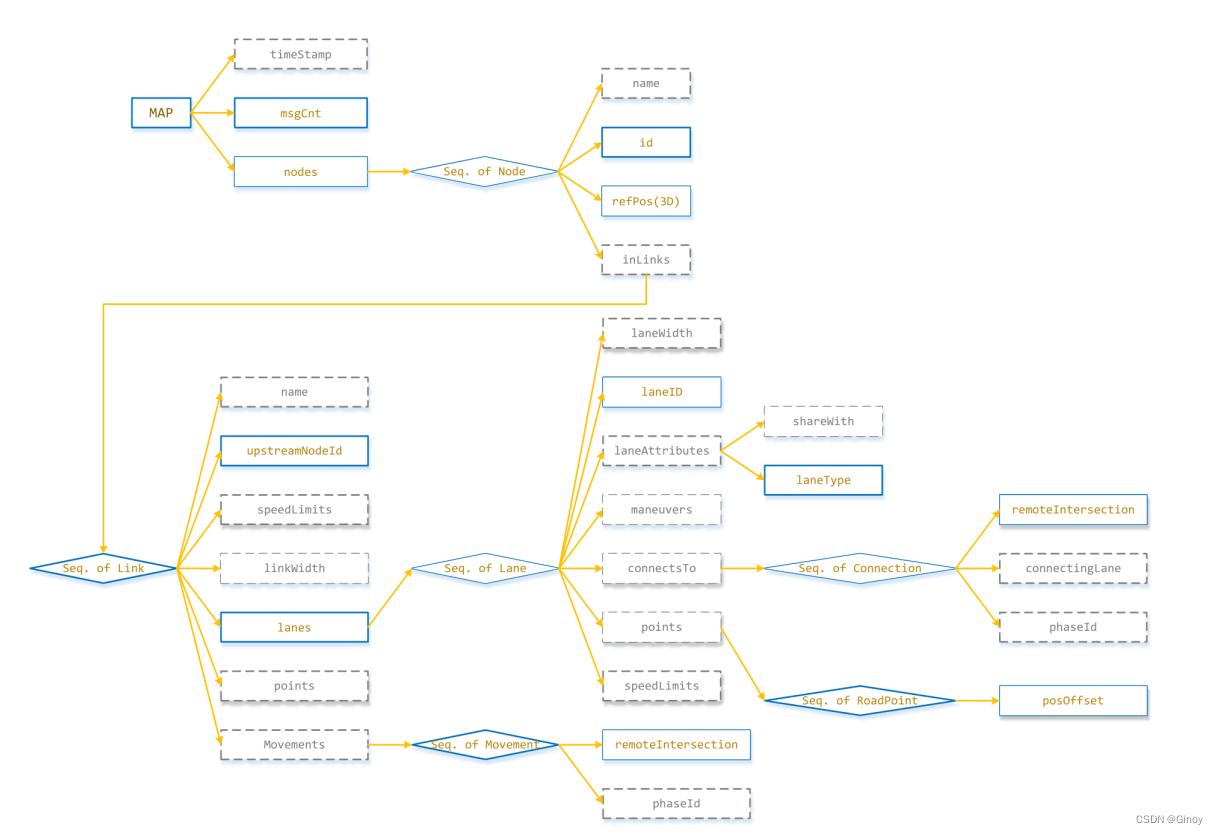
自己整理的含义帮助大家来解读map协议
| 属性 | 定义 |
| node.id | 节点id |
| node.name | 节点名称 |
| node.refPos | 节点坐标值,路口处相对中心位置点坐标,包含经纬度,海拔信息 |
| link.id | 路段id |
| link.name | 路段名称 |
| link.upstreamNodeId | 当前路段的上游node.id值 |
| link.speedLimits | 当前路段限速,如果没有可缺省,后续车道限速中补充赋值 |
| link.points | 路段中心线点序列集合,将路段均等分N个point,取其经纬度坐标 "points": [ { "posOffset": [ { "posOffset": { "lon": 118.97470074789925, "lat": 31.717812832384368 }, "offsetV": { "elevtion": 20.0 } } } ] } ] |
| link.movements | 上游节点id和下游节点id定义的路段与下游路段的连接关系,既当前link行驶下一个link的下游nodeID值 |
| lane.id | 车道id,车道信息,规定从上游节点向下游节点的方向,从左到右依次为1/2/3 |
| lane.width | 车道宽度 |
| lane.laneAttributes | 包括共享车道情况以及车道本身所属的类别特性 { "shareWith": "", "laneType":"driving" } |
| lane.maneuvers | 定义一个(机动车)车道的允许转向行为(转向),maneuvers指该路段能够进行的行为,指该路段能够左转和直行,"110000000000"表示直行和左转 例如: "maneuvers": "111101010000" |
| lane.connectsTo | 定义车道与下游路段车道的连接关系。包括下游路段出口节点ID、连接的下游路段车道基本信息以及对应的信号灯相位号。在车道连接中定义的相位号,是对Movement定义的转向的相位号的一个补充。当某一些车道在转向时需要参考一些特殊的信号灯相位(而不是在Movement中定义的默认相位),则应该将其定义在本数据帧中,定义路段中每条车道,在下游路口处与下游路段中车道的转向连接关系列表,json结构为: remoteIntersection的id为node节点id { "remoteIntersection": { "id": 10002, "region": 2 }, "connectingLane": { "lane": 1, "maneuver": "100000010000" }, "phaseId": 3 } |
| lane.points | 车道中心线点序列集合,将车道均等分N个point,取其经纬度坐标 |
| lane.speedLimits | 当前车道限速 json:{ "type": "vehicleMaxSpeed", "speed": 416 } |

















 987
987

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









