






Joint 3D Instance Segmentation and Object Detection for Autonomous Driving
简单介绍~~
框架PointNet++作为backbone.
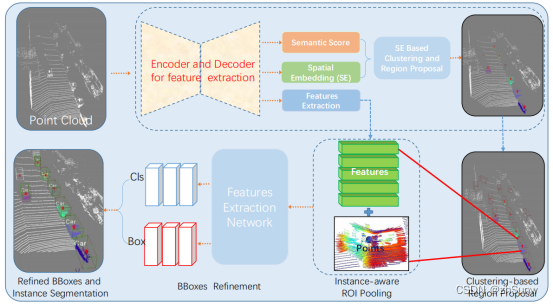
- Backbone提取特征之后为每个点分割语义(FG/BG)信息并预测BBox(offset,dim,θ)的信息。
- 对前景点进行偏移、聚类,将每一类的点分配ID作为一个实例并对每个实例用前5个预测的信息平均得到BBox。
- 实例感知的RoI轮询:将不在BBox内的但是拥有对应ID的前景点也用于Refinement;将在BBox内但是没有拥有对应ID的前景点删除。(即Refinement中对每一个object proposal考虑的是实例的点而不是Box内的点。)















 6298
6298











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









