






人工势场+领航跟随matlab仿真。
ID:34100742832102744
名字是什么并不重要
人工势场和领航跟随是一种常见的路径规划和控制方法,在无人驾驶、机器人导航等领域有广泛应用。本文将利用MATLAB软件进行仿真,详细介绍人工势场算法和领航跟随策略,并通过仿真实例验证其有效性。
首先,让我们来介绍人工势场算法。人工势场算法是基于势能场的路径规划方法,它通过在环境中引入虚拟势场来模拟机器人的运动,以实现路径规划、避障等目标。在人工势场算法中,存在两种势场:吸引势场和斥力势场。
吸引势场用于引导机器人朝目标点移动,并且随着机器人离目标点越近,吸引力逐渐增大。斥力势场用于避免机器人与障碍物碰撞,当机器人与障碍物距离过近时,斥力逐渐增大,使机器人远离障碍物。
在实际应用中,我们可以通过调整吸引力和斥力的权重来平衡机器人在目标点和障碍物之间的运动。同时,我们还需要考虑到环境中可能存在的局部最小点和盆地问题,避免机器人陷入无法跳出的局部极小点。
接下来,让我们讨论领航跟随策略。领航跟随是一种基于多智能体系统的控制策略,它通过引入领航者和跟随者的概念,实现跟随者对领航者的运动模仿和位置跟随。在领航跟随策略中,领航者负责规划路径和避障,而跟随者通过感知领航者的位置和运动,进行相应的模仿和调整。
在实际应用中,跟随者需要通过感知领航者的运动来获取位置和速度信息,并将其作为控制输入进行模仿。同时,为了保持跟随者与领航者之间的距离和相对位置,我们可以引入一些控制策略,比如PID控制器或者模糊控制器。
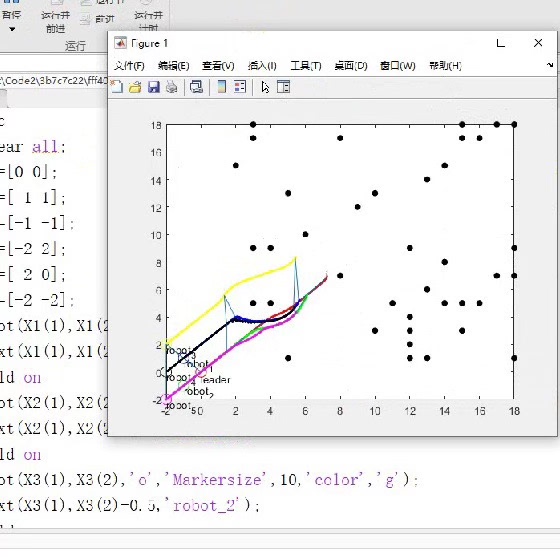
为了验证人工势场和领航跟随的有效性,我们将利用MATLAB软件进行仿真实验。在仿真实验中,我们将建立一个包含目标点和障碍物的环境,并通过人工势场算法和领航跟随策略来实现机器人的路径规划和跟随。通过不断调整参数和环境条件,我们可以观察到机器人的运动轨迹和避障效果。
通过本文的研究,我们可以得出以下结论:人工势场算法是一种简单有效的路径规划方法,可以帮助机器人避开障碍物,并快速到达目标点;领航跟随策略可以实现多机器人之间的协作和合作,提高整体运动性能。然而,人工势场算法和领航跟随策略也存在一些问题和挑战,比如局部最小点和盆地问题、多机器人之间的协
【相关代码,程序地址】:http://fansik.cn/742832102744.html
















 416
416

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









