







机器人控制算法七之 机器人控制相关原理总结
- 总结:
- 机器人的运动过程中相关的算法
- 运动规划
- 误差补偿
- 系统优化
本文章非一次行完成类文本,后期将慢慢补充,同时也欢迎各位同行研究者评论区批评指正或者补充!
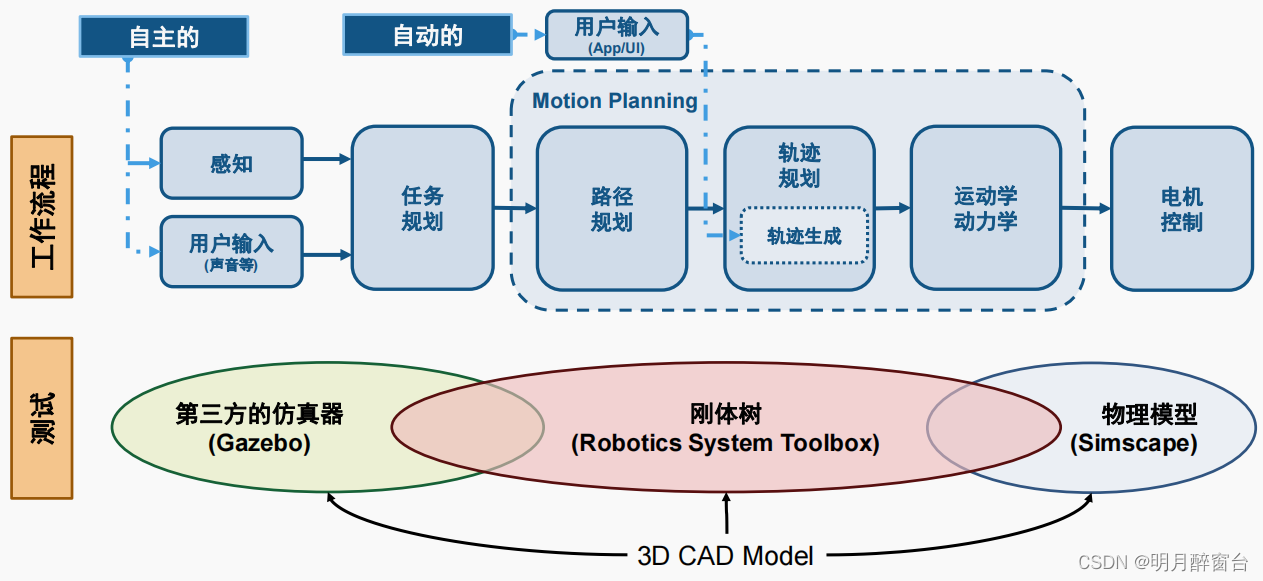
1.控制流程图概览

2.机器人模型表示
- matlab仿真工具箱:https://download.csdn.net/download/yohnyang/86099523
.urdf模型文件表示:
- 总结:
- 机器人的运动过程中相关的算法
- 运动规划
- 误差补偿
- 系统优化
本文章非一次行完成类文本,后期将慢慢补充,同时也欢迎各位同行研究者评论区批评指正或者补充!
.urdf模型文件表示:
 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文

























