






 本文档详细介绍了如何使用Robotics Library在带有障碍物的环境中规划机器人无碰撞路径。教程涵盖创建环境几何数据、设定路径规划描述文件,并结合rlPlanDemo进行路径搜索。场景模拟拾取和放置任务,涉及VRML和XML文件描述机器人的运动学和几何形状,以及RRT和PRM等规划算法的应用。
本文档详细介绍了如何使用Robotics Library在带有障碍物的环境中规划机器人无碰撞路径。教程涵盖创建环境几何数据、设定路径规划描述文件,并结合rlPlanDemo进行路径搜索。场景模拟拾取和放置任务,涉及VRML和XML文件描述机器人的运动学和几何形状,以及RRT和PRM等规划算法的应用。
机器人C++库(11)Robotics Library 之指定路径规划算法

本教程介绍如何使用机器人和各种障碍物设置场景,这些障碍物可与规划算法结合使用以创建无碰撞路径。它需要机器人的正确运动学和几何形状描述,如相应教程中所述。
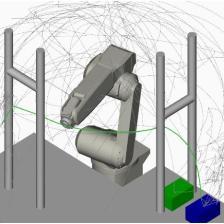
该场景将模拟一个简单的拾取和放置任务,机器人已经就位以抓取物体。规划人员必须找到一条通往目标位置的无碰撞路径来放置该对象。
1.创建环境的几何数据
场景描述的一个必要元素是对机器人及其环境中障碍物的几何描述。由于机器人模型可以在不同场景之间重复使用,因此只需要对障碍物及其相对于机器人基础的位置进行建模。
在我们的教程中,所选机器人是具有六个自由度的常见工业机械手。环境使用一组基本形状(如框和圆柱体)建模,可以使用文本编辑器对其进行编辑以进行进一步试验。

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 1200
1200

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











