







课件及相关资源下载:http://blog.csdn.net/yoouzx/article/details/53098176
贝叶斯滤波器
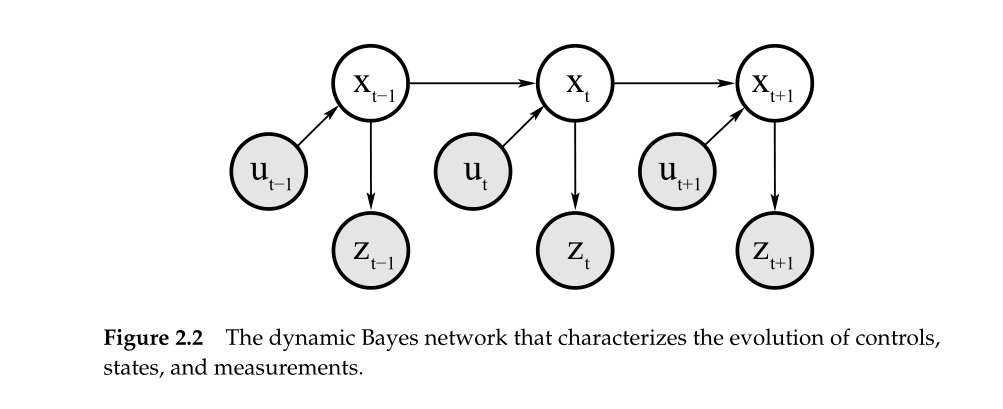
测量和控制输入
定义
z1:t
为不同时刻
t
的环境测量值,
预测方程和矫正方程的推导
贝叶斯滤波器的推导基于贝叶斯概率公式和马尔科夫假设。
1. 贝叶斯概率公式(后验概率):
p(x|y)=p(y|x)p(x)p(y)=ηp(y|x)p(x)
当条件概率涉及到的变量比较多,上式分母就会变得比较复杂,为表示方便这里定义 η 为归一化参数。
相似的,我们可以考虑 p(x|y,z) 的条件概率,这里可以看成在 z 发生的条件下,将概率
p(x|y,z)=p(y|x,z)p(x|z)p(y|z)
2. 定义可信度:
bel(xt)=p(xt|z1:t,u1:t)
3. 根据贝叶斯概率公式将上式展开(参考1.中三个变量贝叶斯公式推导)为:
bel(xt)=p(xt|z1:t,u1:t)=ηp(zt|xt,z1:t−1,u1:t)(1)p(xt|z1:t−1,u1:t)(2)
4. 根据马尔科夫假设进行简化
在probability robotics 这本书里,马尔科夫假设是全书的基本假设,所有的公式都是在这个假设基础行推导而来的,马尔科夫假设核心思想是:已知当前时刻的状态 xt ,不会影响过去和将来的状态。
对于3.公式(1)部分, xt 可以根据之前 t−1 个时刻的测量值 z1:t−1 和t个时刻控制输入 u1:t 得到(参考1. 中状态转移图)。所以(1)部分简化为:
p(zt|xt,z1:t−1,u1:t)=p(zt|xt)
对于公式(2)部分,在连续域进行展开:
p(xt|z1:t−1,u1:t)=∫xt−1p(xt|xt−1,z1:t−1,u1:t)p(xt−1|z1:t−1,u1:t)dxt−1
这一部分可以类比以下公式(B对应于上式 xt−1 ):
p(A)=∫Bp(A|B)p(B)dB(连续域)∑Bp(A|B)p(B)(离散域)
在马尔科夫假设前提下,已知将来的状态 ut 对估计 xt−1 没用提供任何信息,所以:
p(xt|z1:t−1,u1:t)=∫xt−1p(xt|xt−1,z1:t−1,u1:t)p(xt−1|z1:t−1,u1:t)dxt−1=∫xt−1p(xt|xt−1,z1:t−1,u1:t)p(xt−1|z1:t−1,u1:t−1)dxt−1=∫xt−1p(xt|xt−1,ut)bel(xt−1)dxt−1
5. 根据1-4推导,得到迭代的贝叶斯滤波公式:
bel(xt)=ηp(zt|xt)∫x(t−1)p(xt|xt−1,ut)bel(xt−1)dt−1
贝叶斯滤波的更新过程可以分为两个过程:
预测过程(由上一时刻状态 xt−1 和当前时刻控制量 ut 预测当前状态 xt ):
bel(xt)¯¯¯¯¯¯¯¯¯¯=∫x(t−1)p(xt|xt−1,ut)bel(xt−1)dt−1
校准过程(在已知当前状态 xt 的条件下,计算当前测量值 zt 的可信度):
bel(xt)=ηp(zt|xt)bel(xt−1)¯¯¯¯¯¯¯¯¯¯¯¯¯
贝叶斯滤波设计了以概率方式进行状态估计的框架,但没有规定状态变量需要服从哪种分布,在实际应用中,我们可以根据传感器和机器人实际参数进行相关分布律假设。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









