










24年12月来自普林斯顿、斯坦福和 dexterity.ai 的论文“TidyBot++: An Open-Source Holonomic Mobile Manipulator for Robot Learning”。
要充分利用模仿学习在移动机械操作方面的最新进展,需要收集大量人工引导的演示。本文提出一种开源设计,用于设计一种廉价、坚固、灵活的移动机械手,该机械手可支撑任意臂,从而实现各种现实世界的家用移动机械操作任务。至关重要的是,设计使用动力脚轮,使移动基座是完全完整的,能够独立且同时控制所有平面自由度。此功能使基座更具机动性并简化许多移动机械操作任务,消除了在非完整基座中产生复杂且耗时的运动学约束。机器人配备一个直观的手机遥操作界面,以便于采集模仿学习数据。
TidyBot++如图所示:
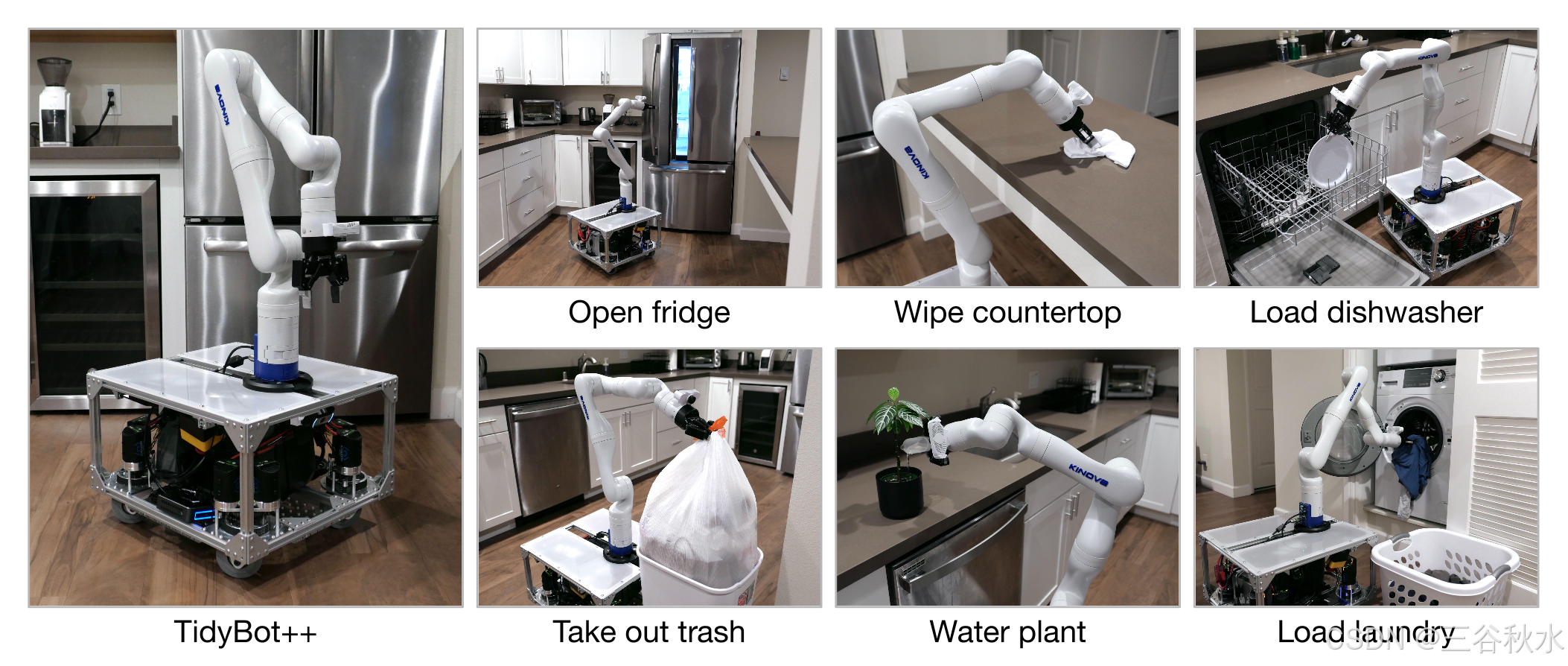
这项工作提出一种移动基座的开源设计,用于携带适合在家庭环境中使用的机械臂。除了价格低廉、灵活且易于组装之外,该基座还是完整的:能够随时在地面三个自由度 (DoF)(x、y、θ)中的任何一个上独立移动。这对于更直观的遥操作来说是一个重要优势,并且大大增加获取大量训练数据以进行现实世界模仿学习的便利性。
非完整机器人,例如差速驱动(类似轮椅)或阿克曼驱动(类似汽车)平台,其运动自由度受到限制。最显着的后果是,它们不能侧向移动。例如,汽车不能直接侧向驶入街边停车位,必须执行多步平行停车操作。
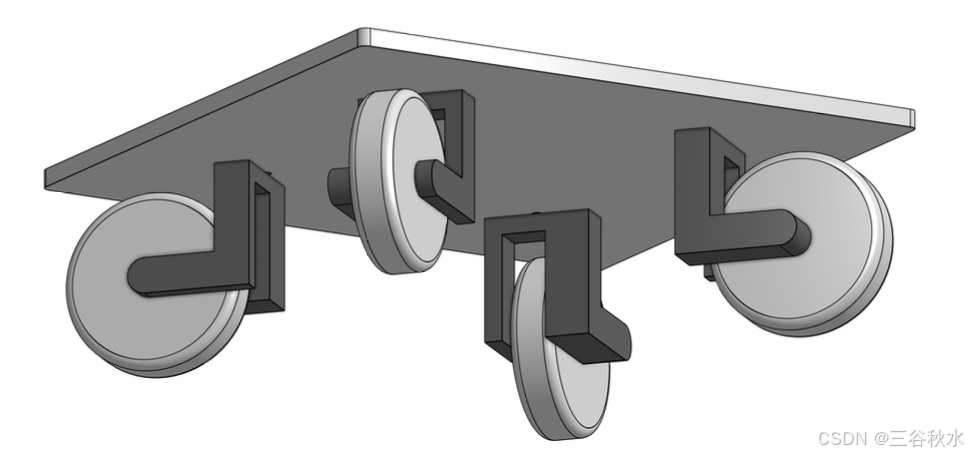
相比之下,完整机器人没有运动学约束,可以同时独立控制所有三个自由度。日常生活中常见完整车辆的一个例子是办公椅,它可以平稳地推向或旋转到任意方向。这是通过脚轮的设计实现(如图所示),脚轮在旋转机构的垂直轴和车轮的滚动轴之间有一个偏移。这种偏移是脚轮的一个重要设计特征,也是使办公椅称为全完整的原因。它创造一个杠杆臂,使车轮在椅子移动时落后于旋转机构的垂直轴,自动将车轮与运动方向对齐。如果没有脚轮偏移,车辆将是全向的(能够向任何方向移动),但仍然是非完整的,因为在车辆开始移动之前,必须手动将车轮对准所需运动的方向。总的来说,为了获得最大的机动性,最好采用完整驱动。该完整底座使用动力脚轮驱动机构 [28]。它由四个电动脚轮驱动,可以看作是一把电动办公椅。四个轮子都可以转向,这使得底座具有全向性,而脚轮偏移使底座具有完整的特性,使其能够瞬间向任何方向加速,因为它不需要先将车轮与运动方向对齐。
完整的移动底座,使遥操作和动觉教学更容易,可以收集模仿学习数据。日常任务,例如打开门和橱柜,通常需要移动底座的侧向运动,以改善手臂在执行过程中的工作空间。这种有用的运动对于差动驱动底座来说并不是立即可用的。相反,机器人必须重新规划车辆轨迹以满足非完整的约束,这会花费额外的运动和时间,而对任务没有任何附加价值。另一方面,完整的移动底座可以更具反应性。无论当前配置如何,它都可以向任何方向任意移动,允许操作员对底座的位置进行微调。
完整基座对于策略学习和推理也很有用。最近的真实机器人模仿学习工作集中在位置表示的使用上,因为与速度相比,位置表示更稳定、噪声更小。然而,非完整移动基座只能在速度模式下控制 [8, 16]。另一方面,完整基座可以直接被命令以可重复的方式移动到任务空间位置 (x, y, θ),因为它可以独立控制所有自由度而不受任何约束。在实验中,确实可以在一个真实的公寓住宅中为机器人几个移动操作任务训练高性能策略。此外,与非完整基座相比,使用从完整基座收集的数据可以更轻松地学习策略。
为了方便该移动机械手收集数据,还开发一个手机遥控界面。该界面使用 WebXR API [29] 将手机的实时 6 自由度姿势传输到计算机,计算机通过低级控制将手机运动映射到移动底座或手臂的相应运动。大多数现代 Android 和 iOS 手机都支持 WebXR,因此界面不需要购买单独的遥控设备。在实验中,使用此遥控界面来收集数据以训练策略。
完整移动基座成本低廉(5-6 千美元),从头开始设计,以优化移动机械操作的研究效率。将完全开源此系统的所有方面,包括硬件设计、手机远程操作界面、策略学习设置和低级控制器。还将为移动基座创建一个文档网页,包括物料清单 (BOM)、带视频的硬件组装指南和 3D CAD 文件。
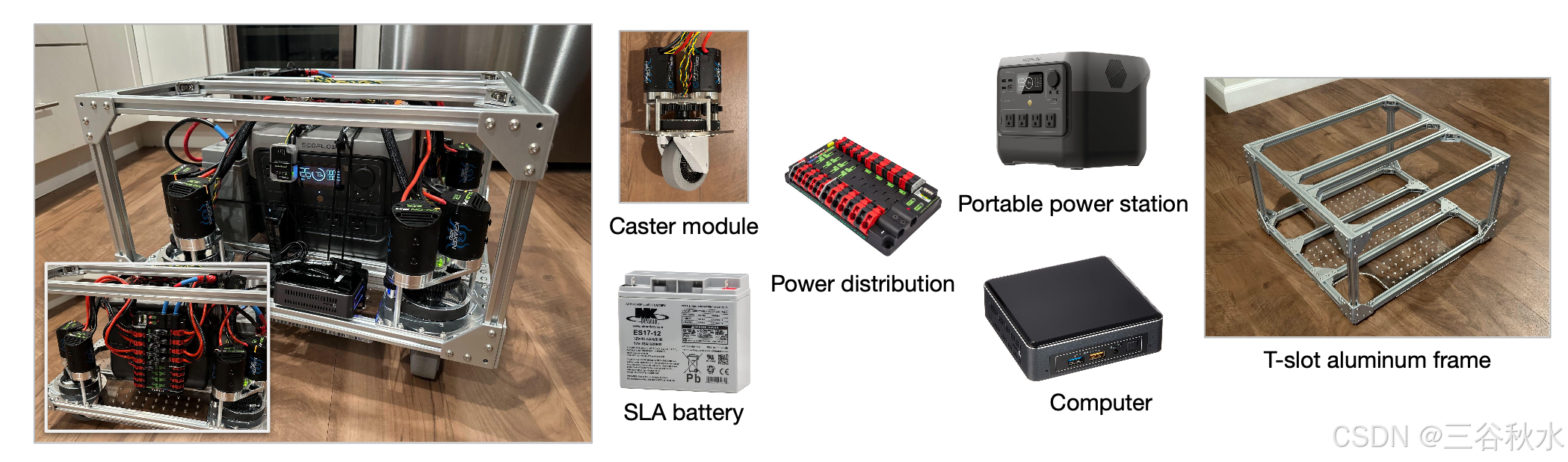
从头开始设计这个移动基座概念,优化移动机械操作研究的生产力。它是简单的、低成本(5-6 千美元)且模块化的(如图所示)。其核心是驱动系统,它基于 FIRST 机器人竞赛 (FRC) [56] 生态系统中现成的组件。由铝制 T 型槽挤压件制成的基本框架,承载着四个电动脚轮模块,这些模块通过熔断配电板由密封铅酸 (SLA) 电池供电。FRC 生态系统中有许多类似的组件可用于构建类似的系统。FRC 用户和供应商庞大而活跃的社区确保组件有据可查且随时可用。
驱动系统源自一组在 FRC 中广泛使用的 SDS MK4 偏转模块 [57]。偏转模块与脚轮非常相似,有一个可以主动转向和驱动的轮子,但它们没有脚轮偏移,因此形成一个非完整基座。这些模块使用两个带有集成编码器和 CAN 总线控制器的电机,一个用于转向,一个用于驱动。此外,还有一个绝对编码器直接安装在转向轴上以测量转向位置,从而消除启动归位运动的需要。USB-CAN 适配器用于通过 CAN 总线与电机和编码器通信。
修改 MK4 转向模块,通过引入主销后倾角偏移来创建完整的基础设计,对原装转向模块进行最少的修改:2 个定制的 3D 打印轮架和一个定制的加工轴。轮架可以在标准 FDM 3D 打印机上使用 PLA 长丝状打印,并且可以使用 CAD 文件和规格从 Xometry 等在线加工服务轻松订购轴。现成套件的所有其他部件都可直接重复使用。
为了完成这个移动机械手,添加一台迷你电脑(英特尔 NUC)和 Kinova Gen3 臂。计算、操作和外围设备的电源由高容量(768 Wh)、快速充电(70 分钟内 0-100%)便携式电站(野营电池)和交流电源插座提供。便携式电站(8.6 千克)和 SLA 电池(6 千克)用作配重,防止底座翻倒。请注意,可以构建仅使用一块电池的电路以提高空间效率,但这里选择单独的电池,因为它提供更大的灵活性并使设置更容易。
开源设计具有高度可定制性:可以轻松修改框架以支持安装不同的臂甚至多个臂,并且可以轻松安装和供电许多其他传感器(如摄像头、麦克风等),以适应正在进行的研究。
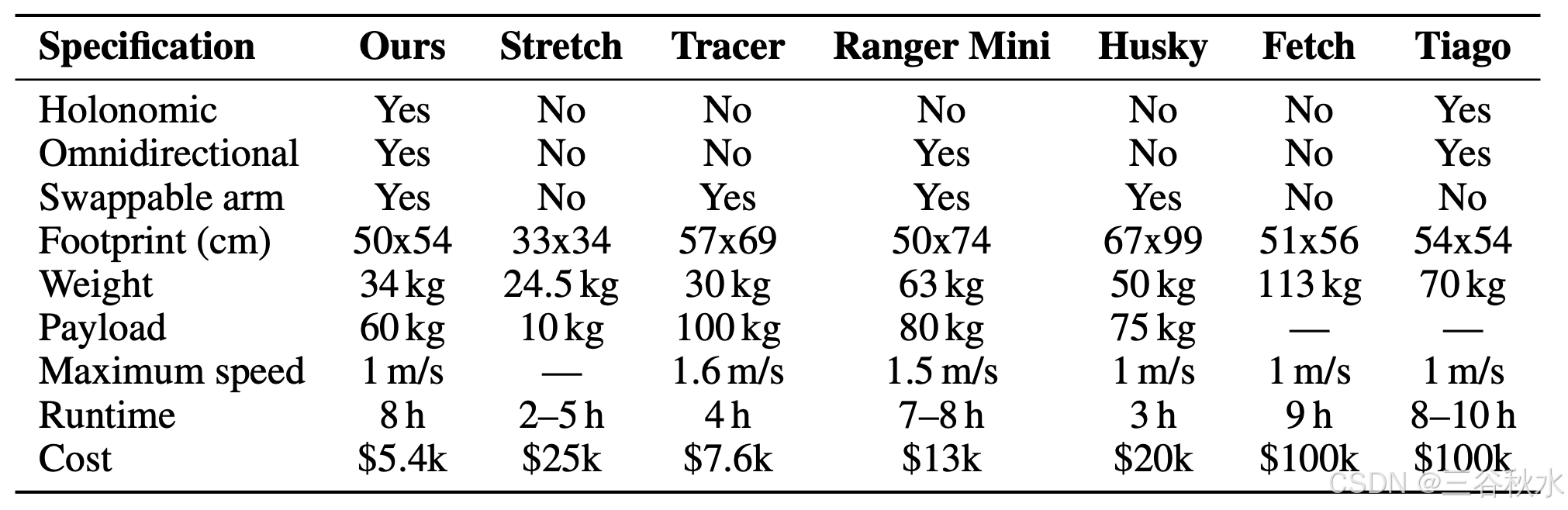
在下表中,将完整基座与其他常见移动基座和移动机械手进行比较。其中包括 Hello Robot 的 Stretch 移动机械手、AgileX 的 Tracer 和 Ranger Mini 2.0 AGV、Clearpath 的 Husky AGV 以及 Fetch & Tiago 移动机械手。我们的移动基座具有最大的机动性、性能和灵活性,同时成本也最低。请注意,虽然 Tiago 是完整的,但它使用麦克纳姆轮,这会使机器人在移动时振动。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









