






本文部分素材来自Dr_Can的B站教程,请支持原作者。DR_CAN的个人空间-DR_CAN个人主页-哔哩哔哩视频 (bilibili.com)
1. 二阶系统标准形式

为常数,可知
为
另
可知根为
化简为
可知根为
和
将上式分解可得
转换为时域形式
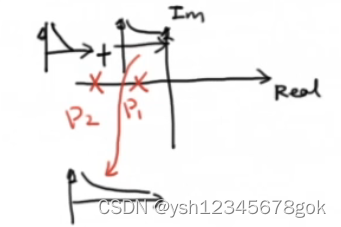
- 当
时,P1和P2<0,根位于负实轴上,根越远离0收敛越快,但是最终收敛的速度取决于离0最近的根。
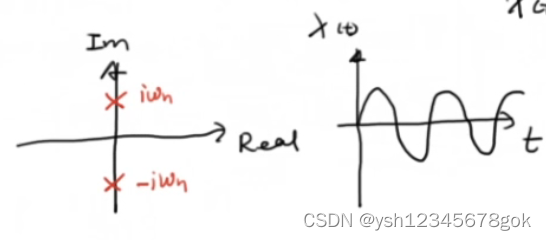
- 当
时
和
可知
由拉普拉斯反变换可知
所体现出两个根在虚轴两侧,一直震荡不会收敛。
- 当
时
定义阻尼固有频率
此时有
常用拉氏变换表 - YKR - 博客园 (cnblogs.com)
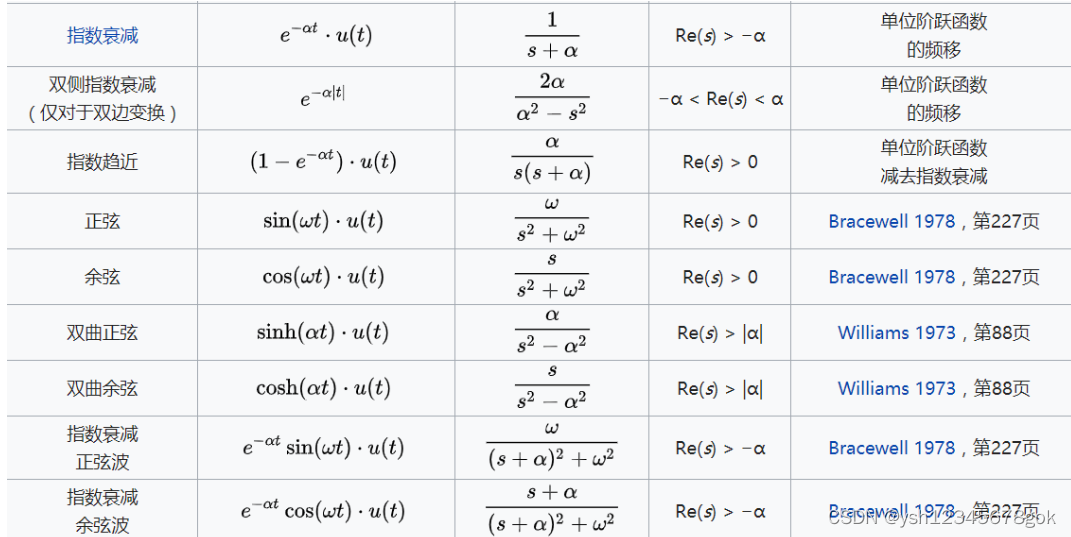
符合指数衰减正弦波

若将根向左移动,那么系统的震荡频率不变,但是收敛的速度会变快。
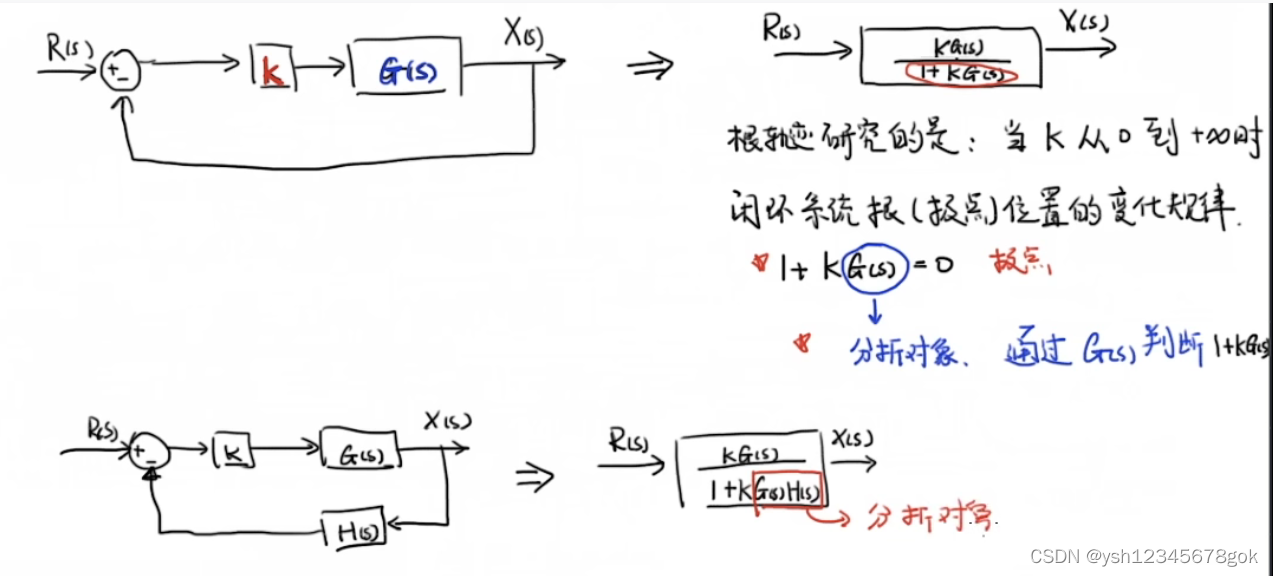
分析根轨迹时基于开环传递函数极点分析,通过G(s)判断1+G(s)=0,若存在H(s),那么G(s)代表着G(s)H(s)















 2265
2265











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









