






本文部分素材来自Dr_Can的B站教程,请支持原作者。DR_CAN的个人空间-DR_CAN个人主页-哔哩哔哩视频 (bilibili.com)
1.系统稳定性
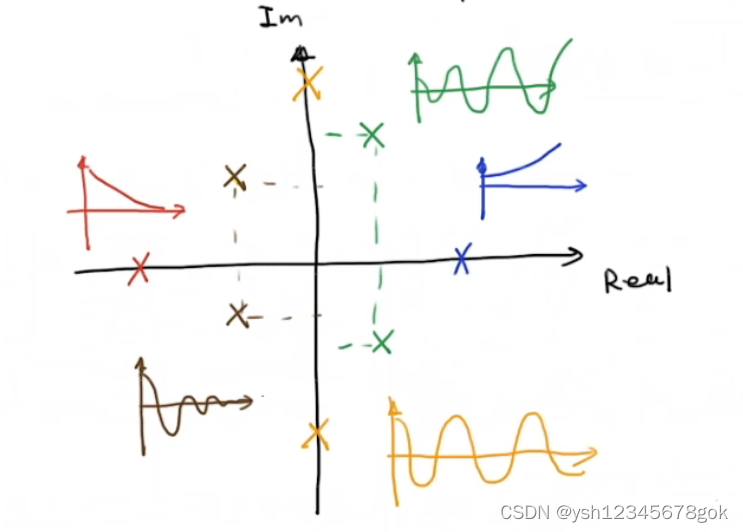
三种稳定情况,一共分为不稳定、临界稳定和稳定三种状态,不稳定在输入情况下输出不确定范围跳动,临界稳定输入在限定范围内,输出在规定的范围内波动,图中举例为平衡车,身体前倾看作有界的输入,平衡车跟随输入有界输出,超出范围后系统失去稳定性,稳定系统在时间为无穷大时,最终的结果都会趋于稳定。

2.闭环传递函数

最后化简
再变成传递函数的形式

最终的设计重点变为控制器的稳定性设计和误差分析,实际是把该闭环系统视为“开环系统”,该系统传递函数为
,研究
是否稳定。

此时开环系统与闭环系统输入为单位脉冲与
,其拉普拉斯变换后值为1,故追求稳定性的的问题就却决于
是否收敛。

将得到的传递函数因式分解可以得到如上形式,进行拉普拉斯变换,拉普拉斯变换常用公式如下
可知例1传递函数可以分解为第二种形式,极点值为-3和2,随时间变化逐渐到,
随时间增大逐渐增大,
,可知

同理,该系统为逐渐稳定的。
实部的正负影响着系统的稳定性,实部为正系统不稳定随时间增加逐渐发散,实部为负系统逐渐稳定,实部为0,系统震荡不稳定。
3.控制器D(s)研究
(1)比例控制器
下图为肥胖问题的传递函数图,只使用比例控制器控制,R为摄入量,M为体重,D为扰动项。


最终稳定与否取决于第二项
时的值,这就用到了下面的结论,要求
满足上述条件时才有可能实现稳定。
Dr_CAN留问题Kp=-5,含义是什么。
一位同学回答比较好,在此贴出
这个模型里是不是可以把这个Kp看成一个“决心因子”或者“自控因子”,Kp越大,表示你减小差距的愿望越强烈,采取的行动越多。根据系统的根我们知道Kp+10α两个参数共同影响着体重的输出结果。于是当你的决心Kp在代谢率系数10α的承受范围内,即Kp>-13时,体重总是可控的,而且愿望越强烈,就能越快达到目标。
Kp>0说明你比较节制,只要体重超过预期,就会采取行动减肥;
Kp=0说明you just dont care,不会因为体重和预期有差距而产生任何行动,任由干扰项身体代谢率 do the job,
Kp<0(比如-5)说明你就算体重超过预期仍然快乐养膘,这时只要你的快乐程度没有战胜基础代谢率(系统自身的稳定性储备),那么体重虽然慢但仍然早晚可以依靠自然代谢率降下来。但是如果你看到自己越胖约开心,主观上加大力度继续变胖,自控因子Kp<-13,身体代谢率也救不了你的时候,你的体重就会疯狂爆炸。
总结:Kp正负决定着反馈的正负,超出限定值系统失去稳定性,(系统自身的稳定性储备)<输入反馈。
(2)积分控制器
但这也引入了一个问题,使用比例控制器控制系统,一直会存在一个稳态误差。

比例项稳态误差分析

输出值为
FVT(终值定理)
可知最终稳定值为,假设R(s)为定值将指定值与最终稳态值做差可知稳态误差为
根据此公式可知,Kp越大稳态误差越小,但可能导致超调,且不论多大都存在误差值。
重新设计控制器
FVT(终值定理)
实际上
若要,那么
可以得到
此时,控制器C(s)完美解决了稳态误差,但是使其变成了二阶系统,存在超调
但是比例与积分环节串联,使得















 6012
6012











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









