







首先抛出水源涵养重要性评价的公式:水源涵养量=降雨量-蒸散发量-地表径流量,其中地表径流量=降雨量*平均地表径流系数
声明:以下数据来源于来自于牛强老师书籍(城乡规划GIS技术)。
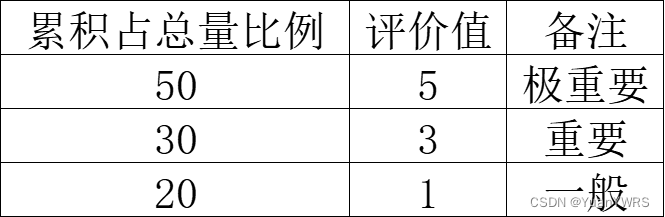
以下给出重要性评价阈值表:
分了三级:一般、重要和极重要。
用到数据:降雨量数据、生态系统空间分布数据、年均蒸散发量数据、实验区域矢量数据。
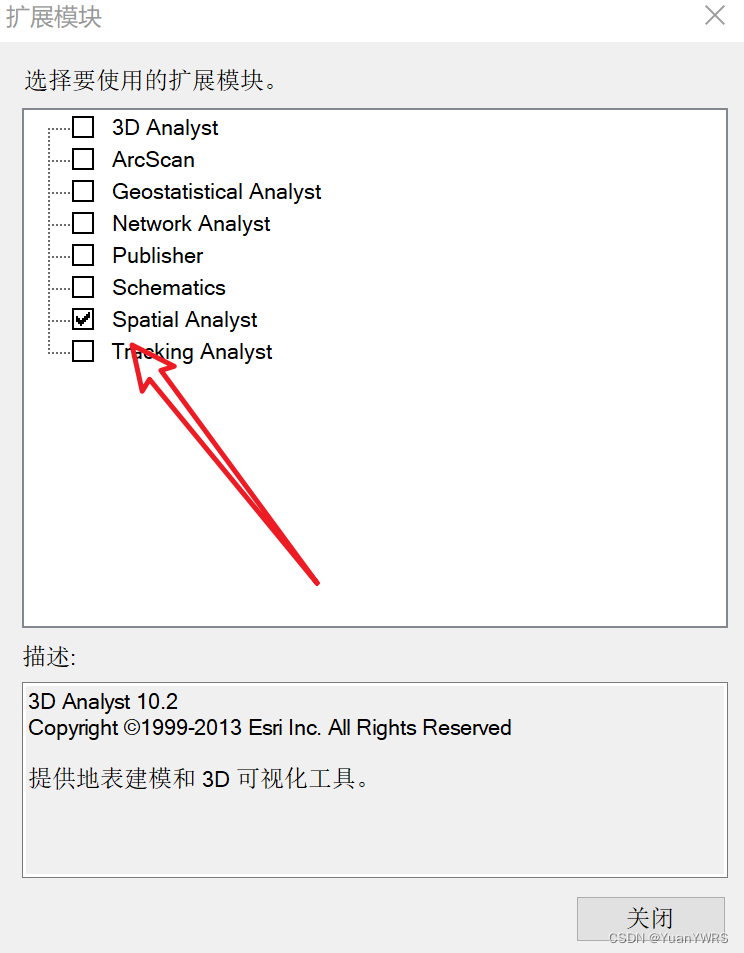
开始实验之前,先通过扩展模块将【空间分析】工具激活,然后才可以使用其中的工具。
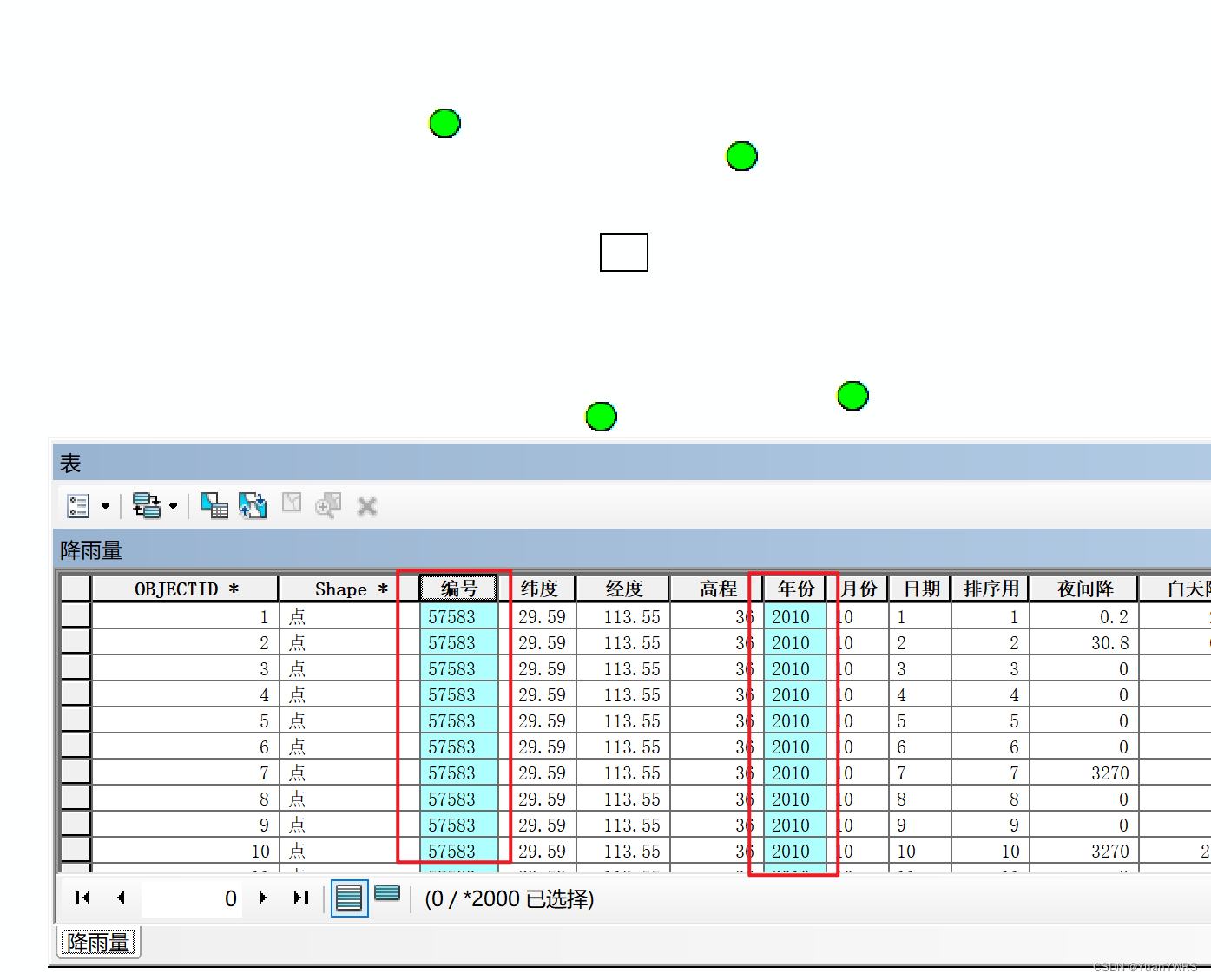
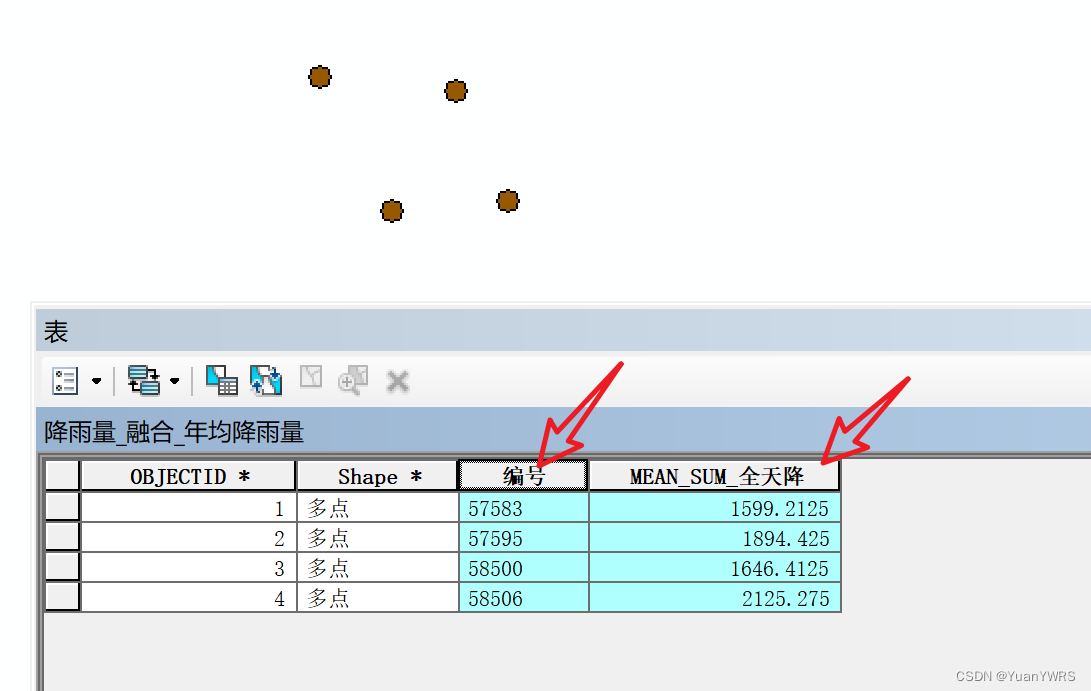
下图是降雨量数据,在研究区周边共有四个气象观测站,因此,就获得了这4个点位的数据,数据中包含很多字段,其中最有用的包括编号、年份和全天降雨量。
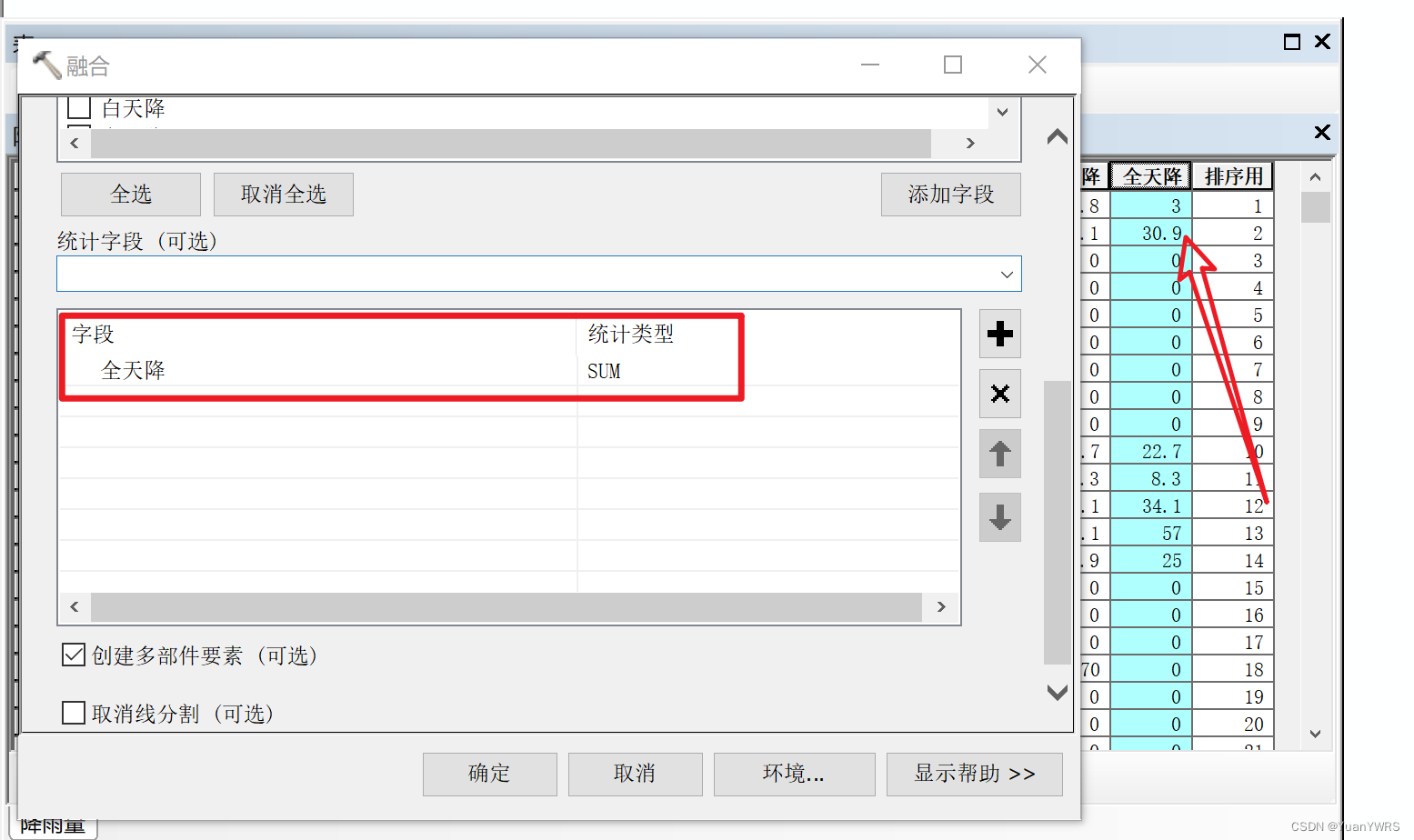
下图是对降雨量数据进行的【融合】操作,其目的是得到全年总降雨量,同时保留编号和年份。如下,在【融合_字段】里选择需要保留的编号和年份。
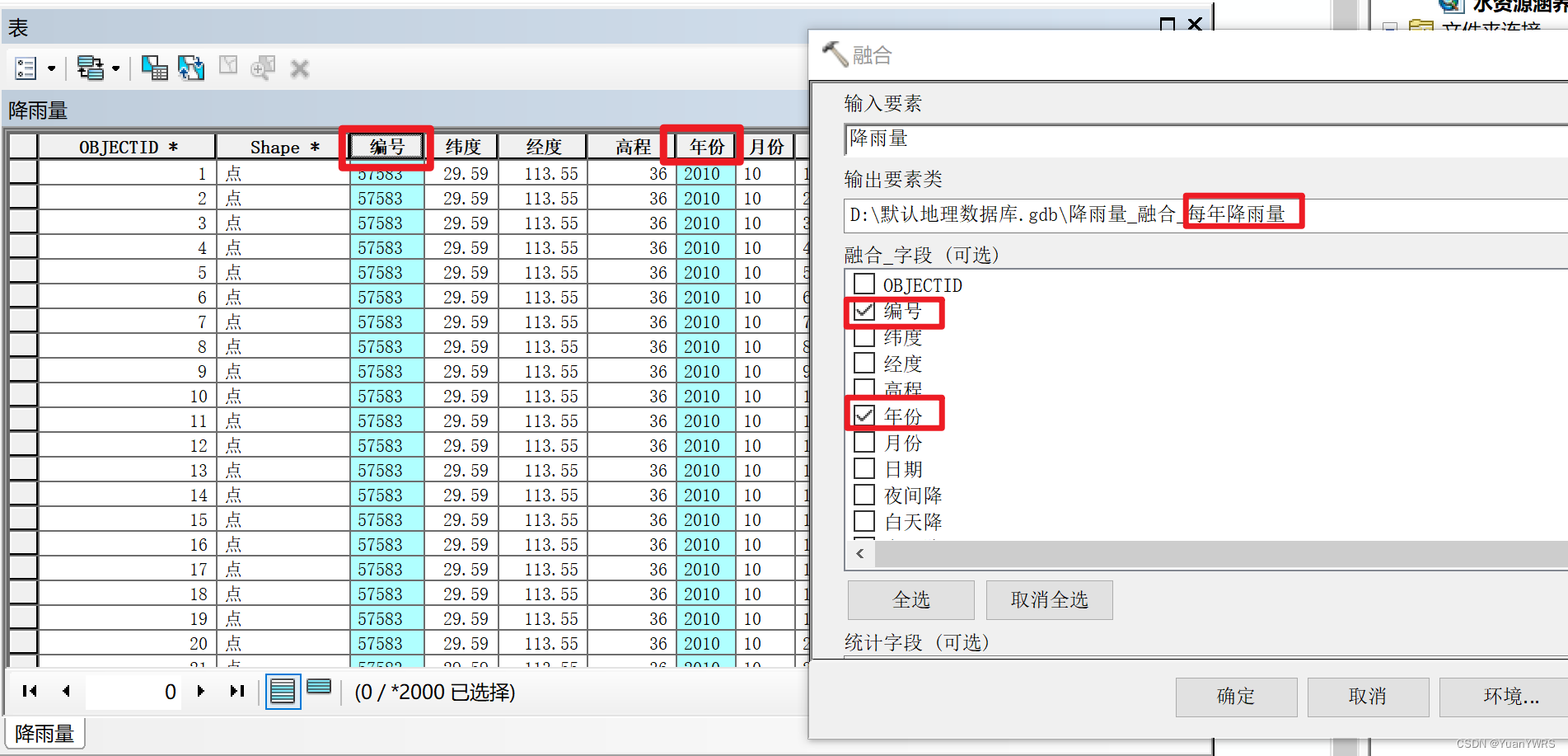
在【统计字段】里选择全天降雨量的SUM类型,用于得到每一年的全年总降雨量。
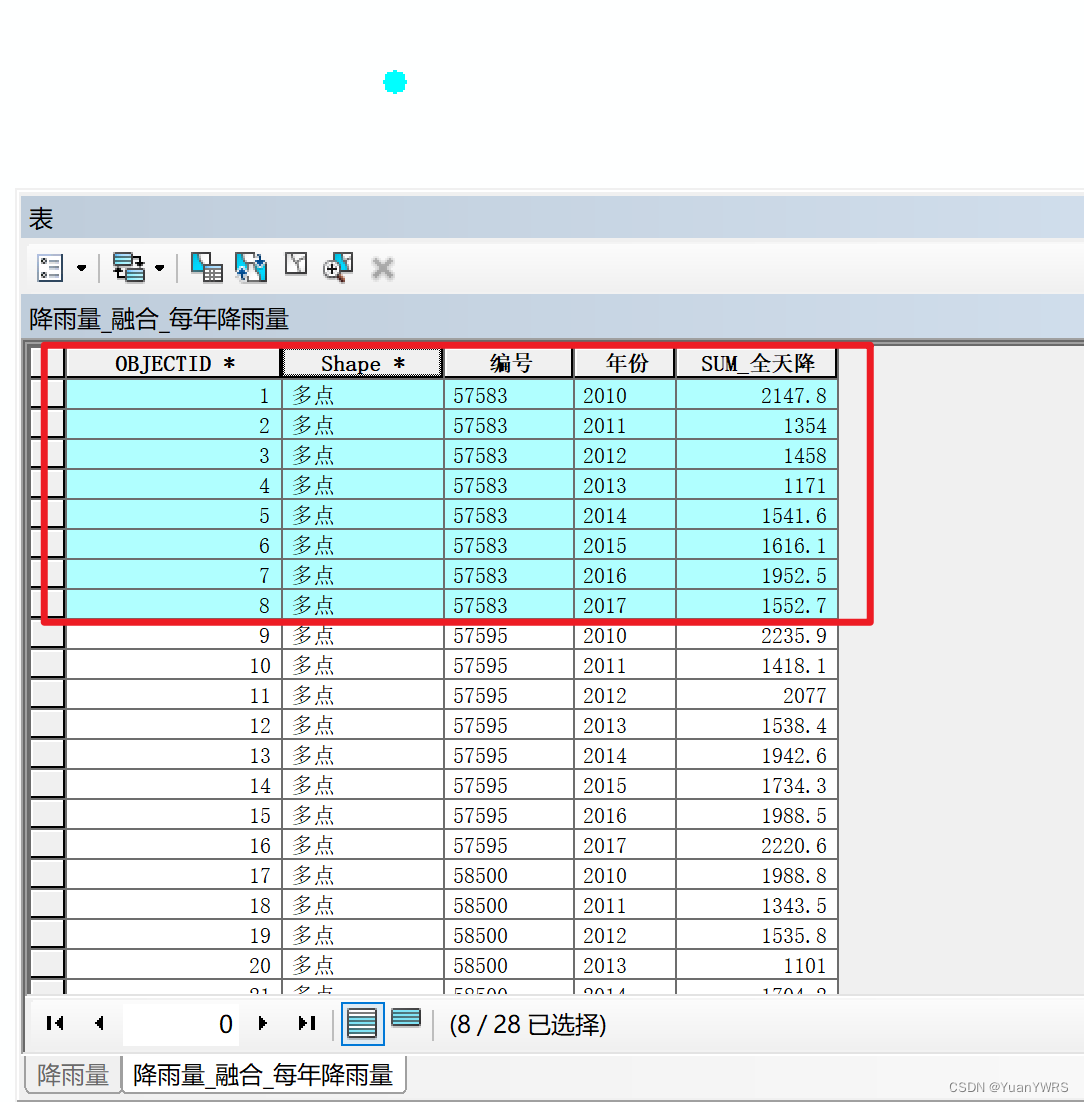
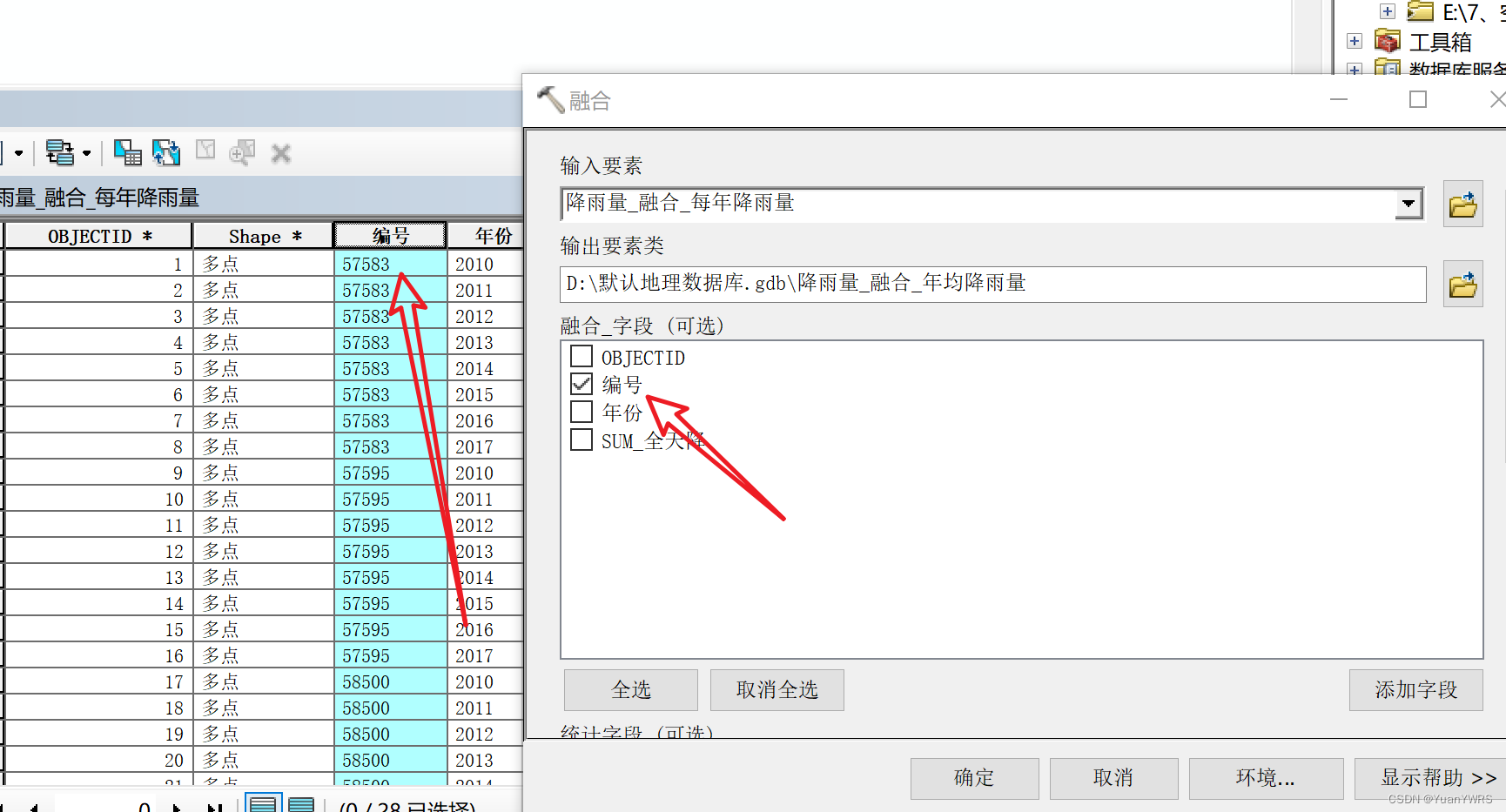
如下,得到了每年降雨量,接下来,我们要得到年均降雨量,也就是得到4个气象站点位的所有年份的平均降雨量,仍然使用融合工具。
如下,同样的操作,这里只保留编号,也就是气象站的编号。
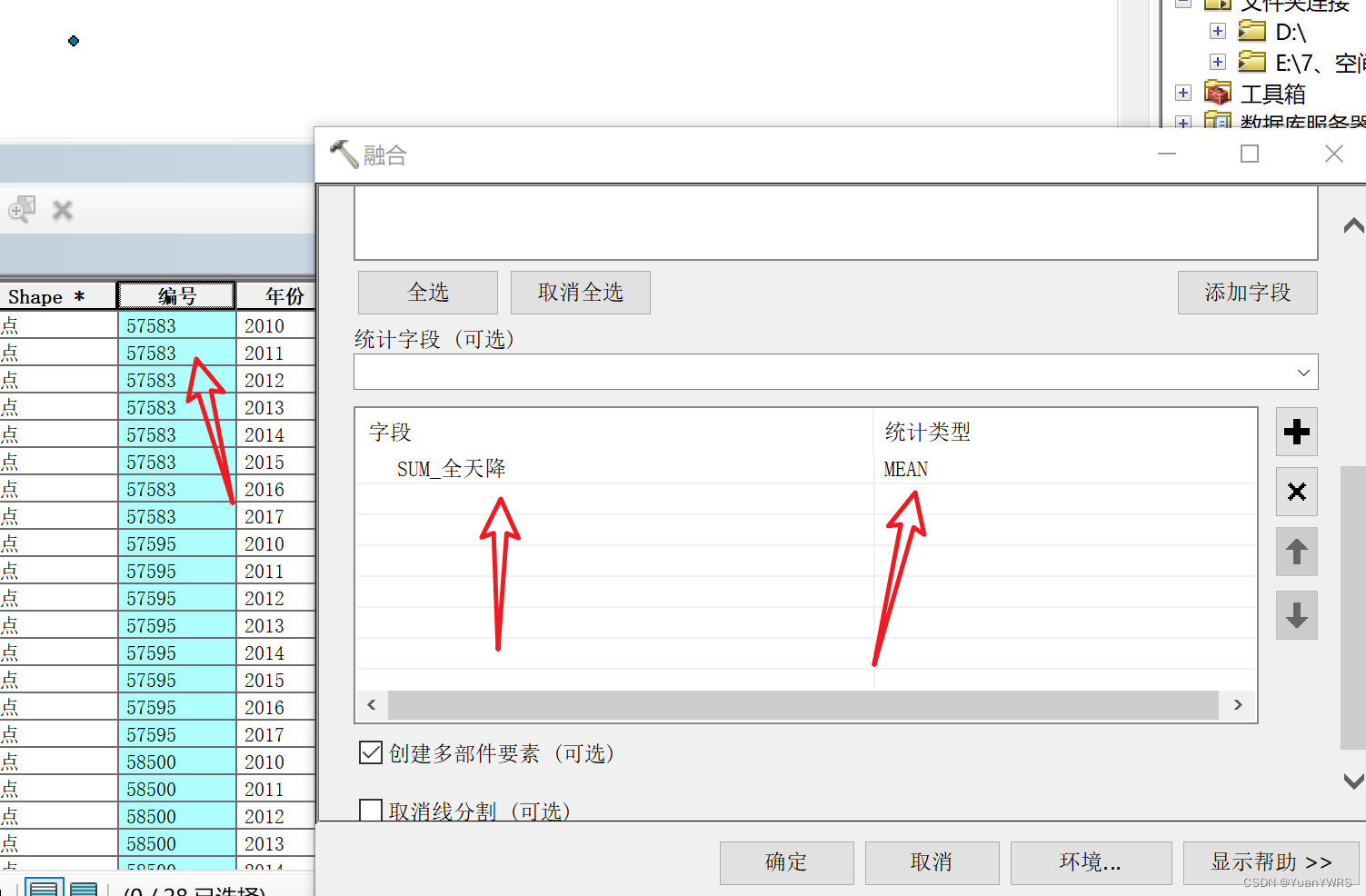
在统计字段里选择【sum_全天降雨量】,统计类型选择平均值。
如下,我们就得到了年均降雨量,此时就只有四个点位和四个年均降雨量的值。
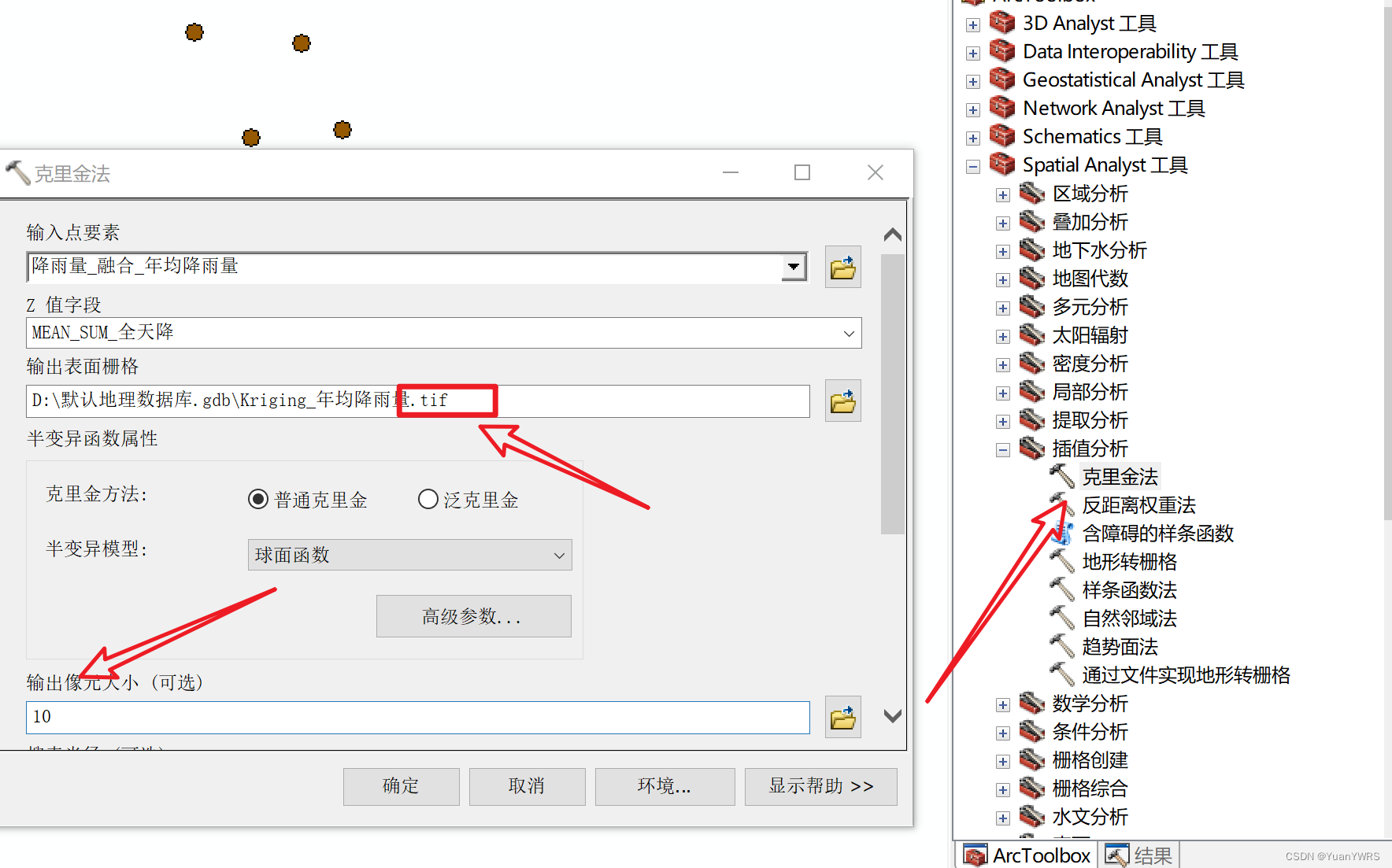
由于目前得到的年均降雨量是点位,也就是矢量数据,为了后续使用,需要进行插值运算,以获取整个研究区内的年均降雨量,这里选择的方法是【克里金法】。
如下,克里金法的工具位于【插值分析】内,在输入的要素中选择年均降雨量,参数里选择【普通克里金】、【球面函数】,在输出像元大小里选择【10米】。
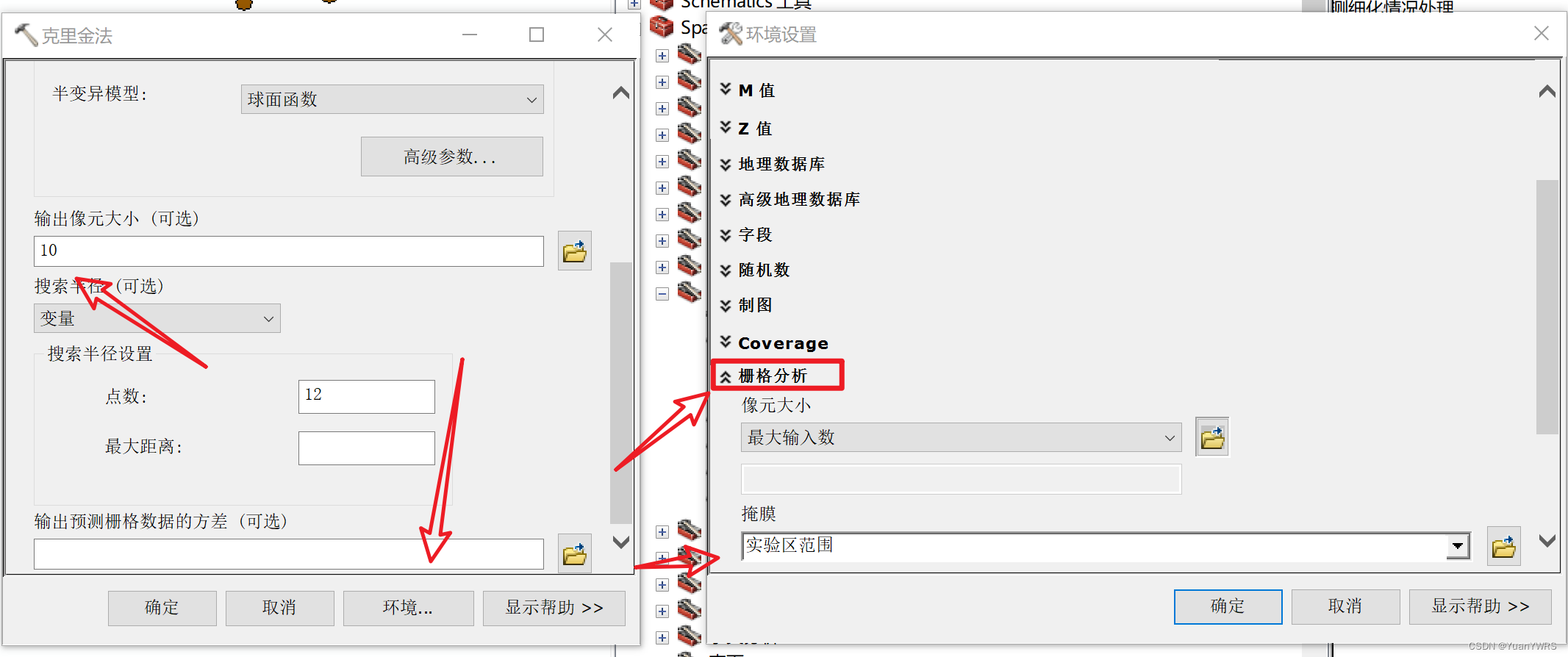
然后进行【环境设置】的参数填报,在【环境设置】下找到【栅格分析】,在【掩膜】里选择此时实验的研究区范围数据,点击确定。
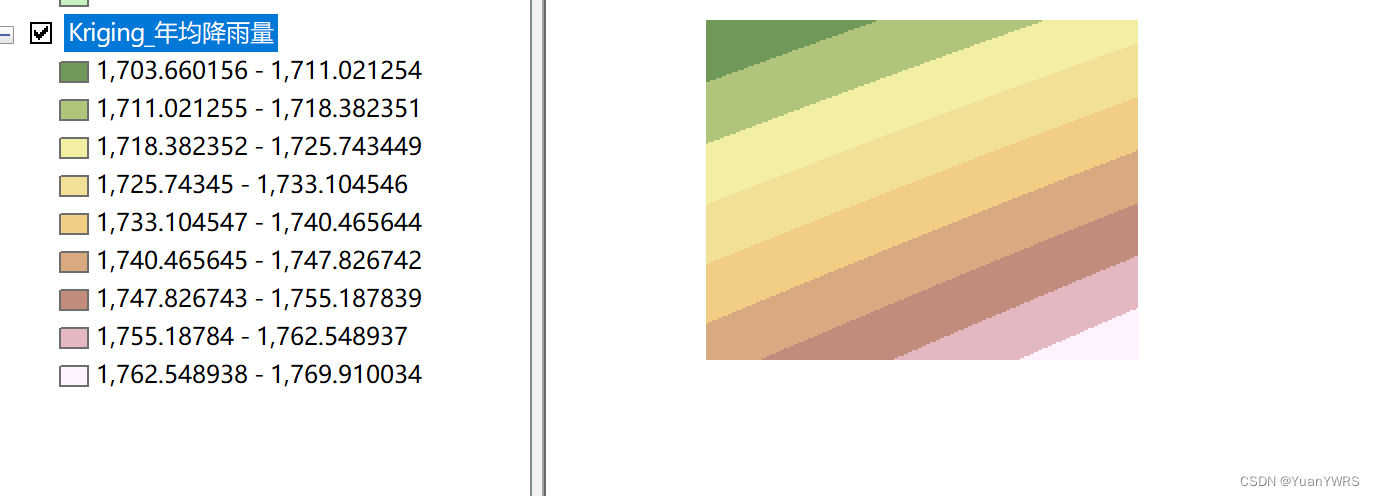
如下,得到克里金插值后的年均降雨量数据,此栅格数据留存,后面会使用。
接下来,将径流系数数据生成栅格数据。
如下,为径流系数对照表,当然此表的对应数值可能根据研究区域的不同而有所差异,各位同学可以根据阅读相关论文自行获取。
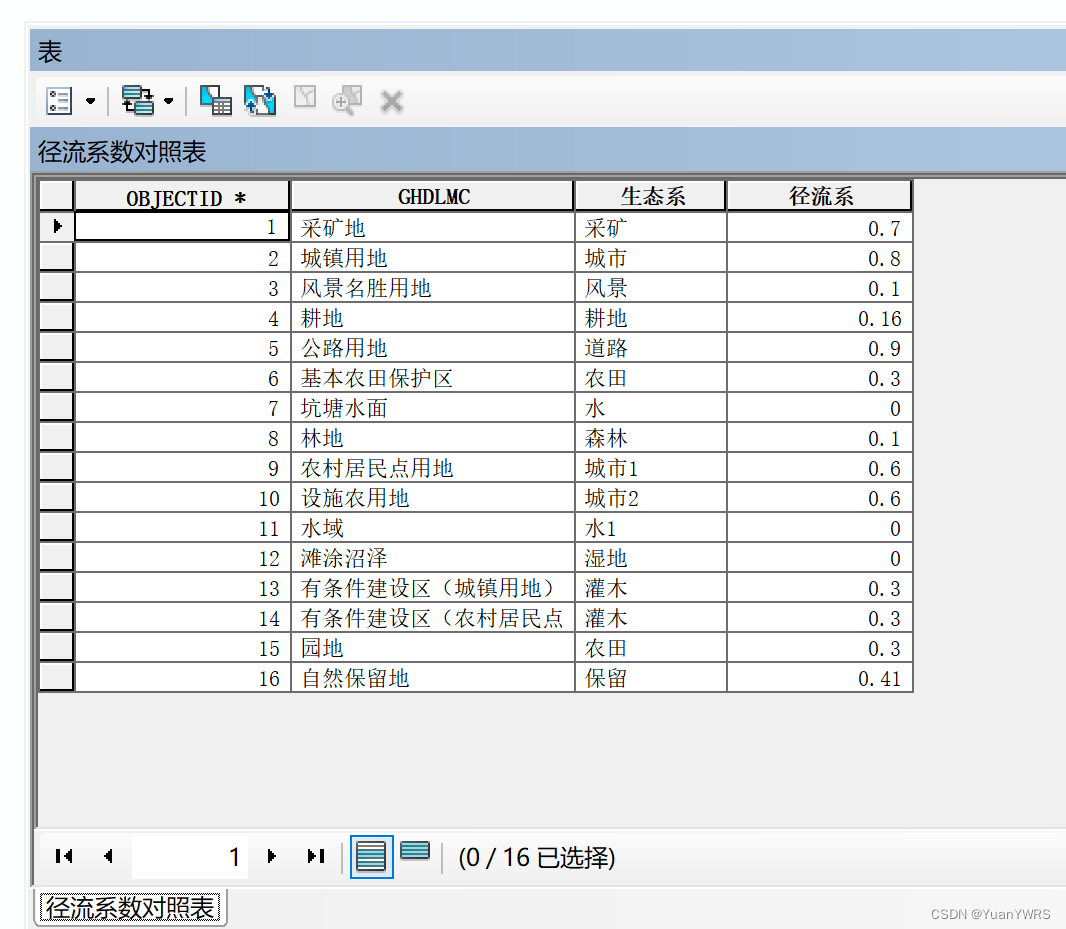
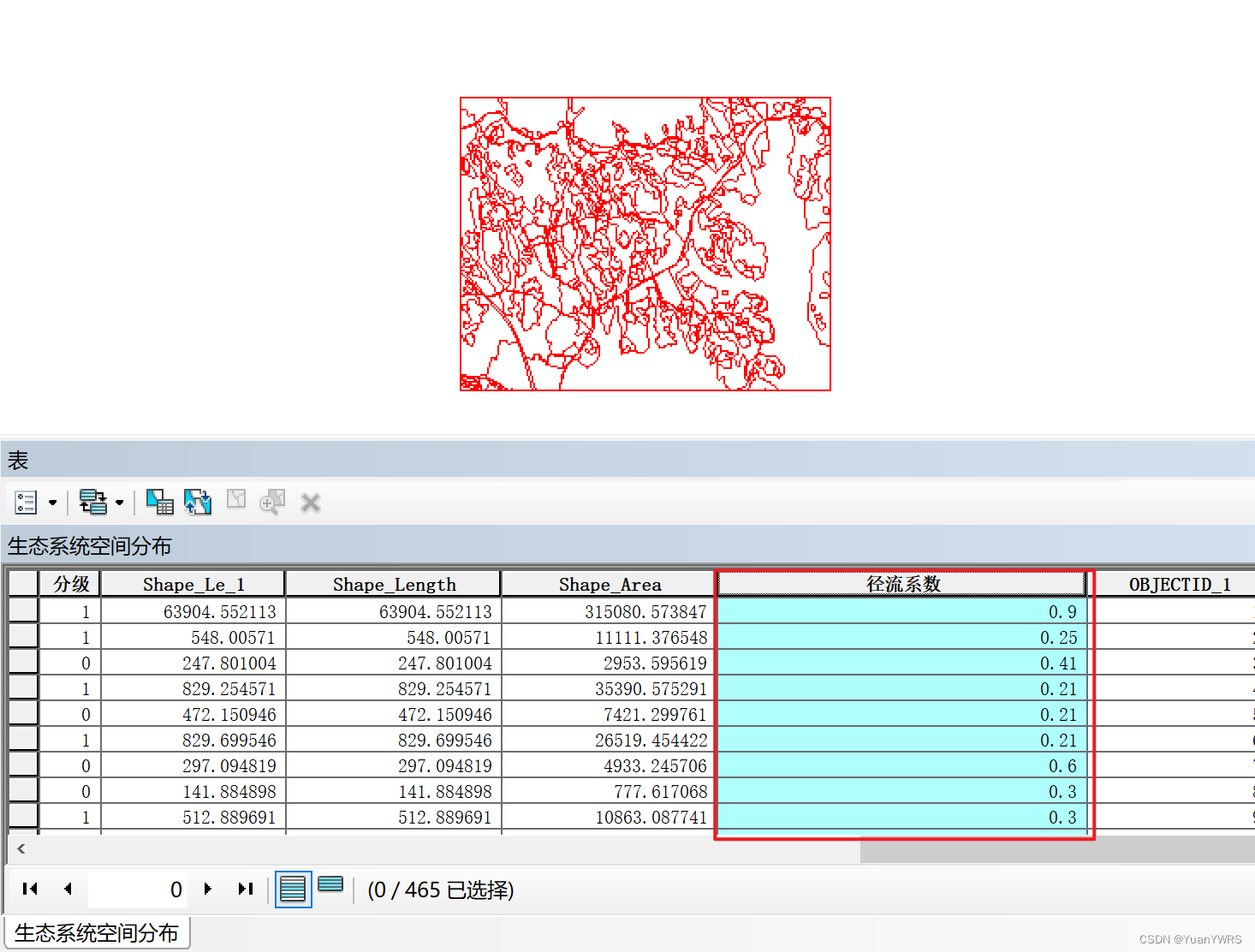
在数据处理之前,已经先根据对照表把生态空间数据里把径流系数的字段进去了,如下所示,此时,数据状态是矢量数据,
接下来的操作是将矢量数据转换成栅格数据。
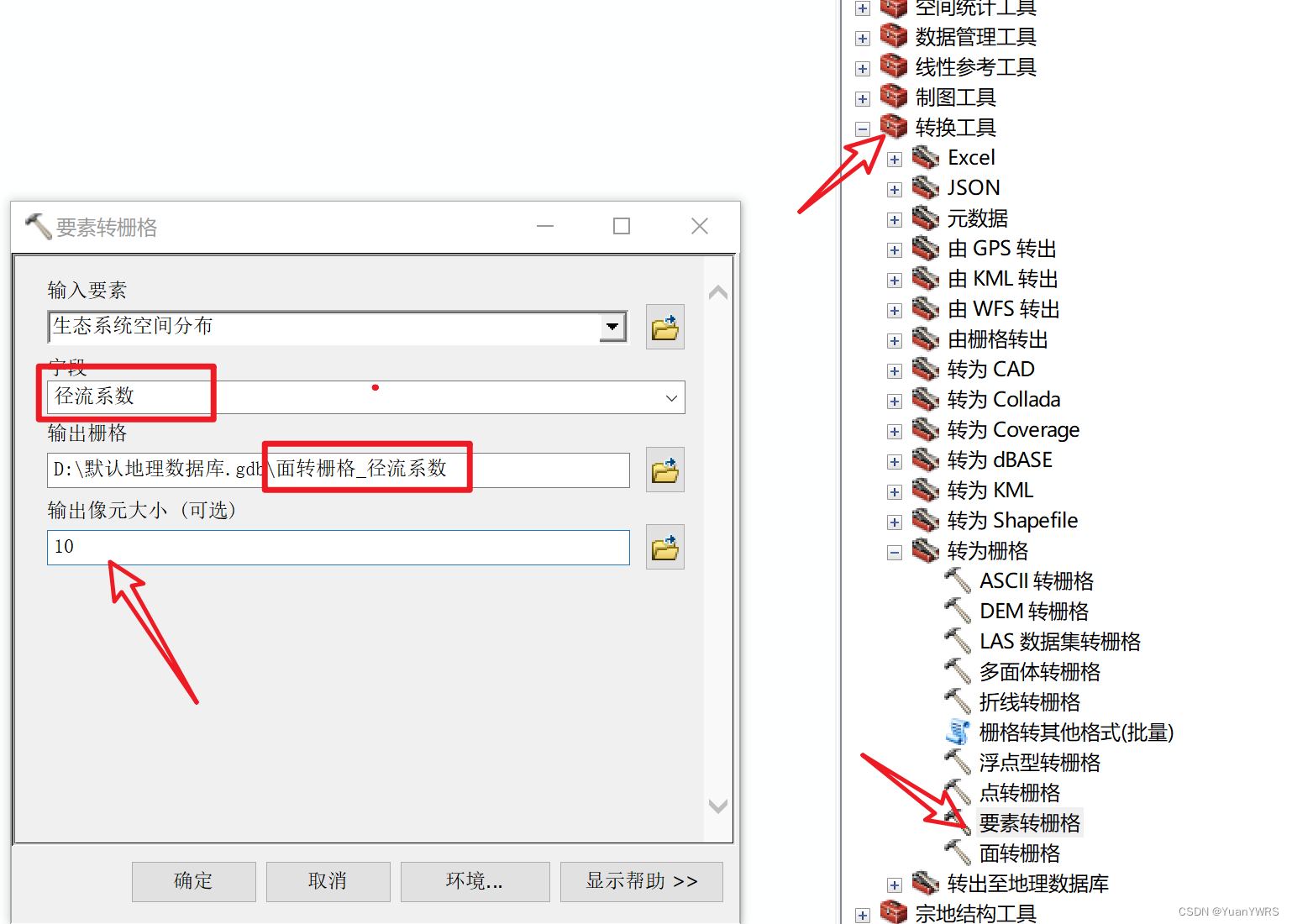
如下,使用【转换工具】下的【要素转栅格】,在输入参数里的【字段】里选择【径流系数】,同样保持输出像元大小为【10米】。
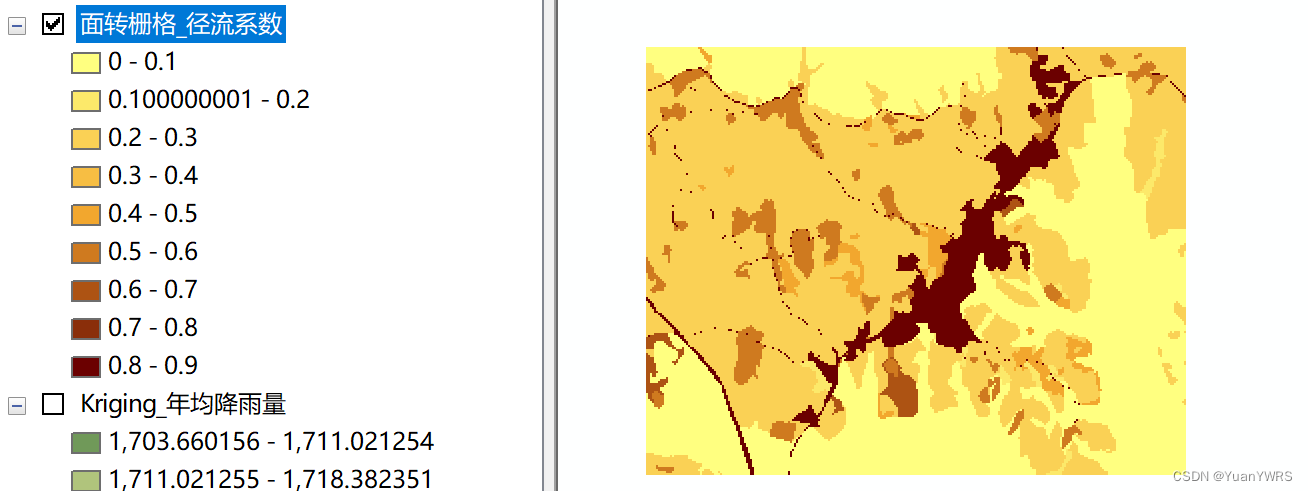
如下,得到径流系数的栅格数据。
其中,用到的另外一个数据是【年均蒸散发量】,因为这个数据的计算比较特殊,这里就直接给出使用。
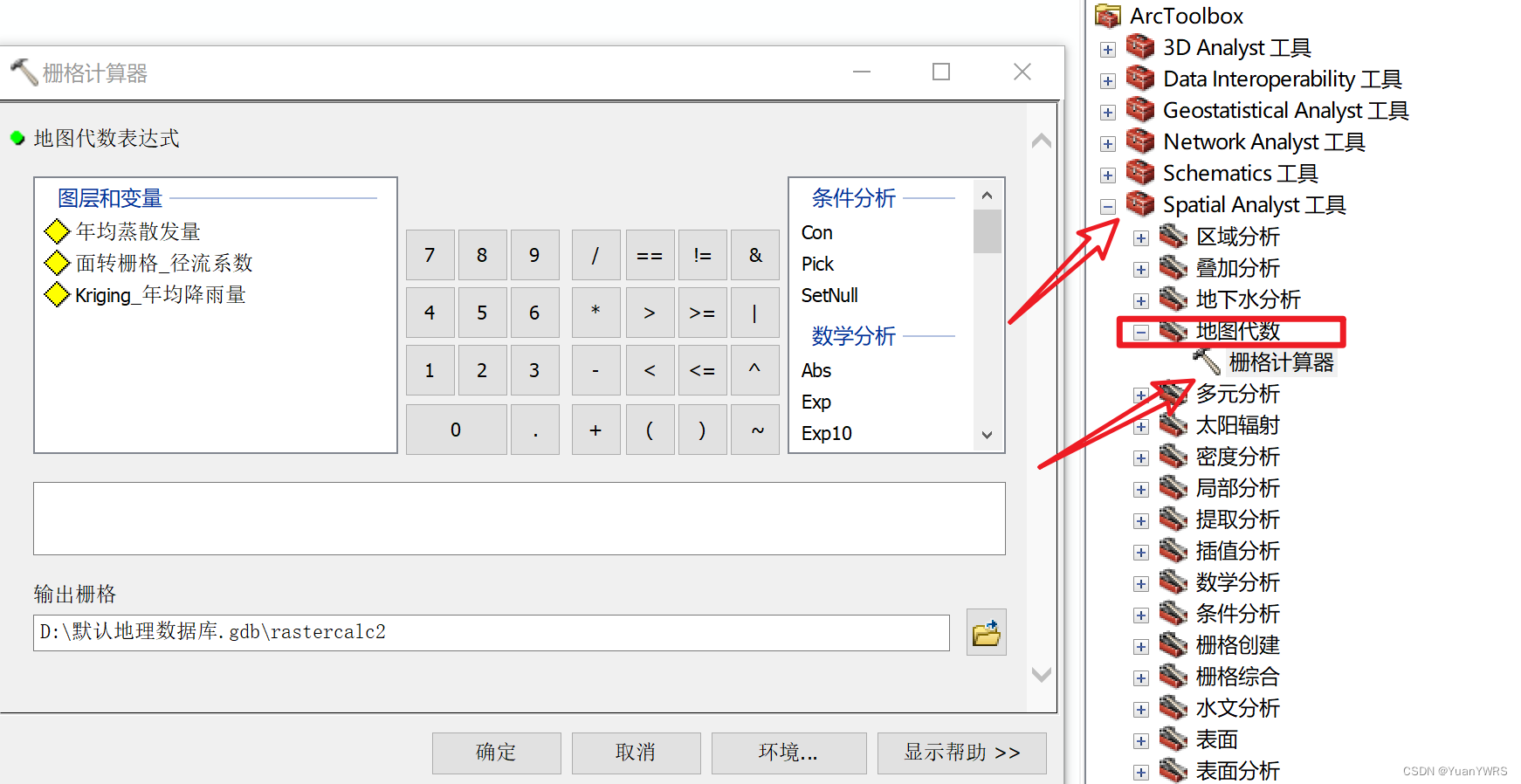
接下来,计算水源涵养量。
使用的工具是位于【地图代数】下的【栅格计算器】,如下所示。
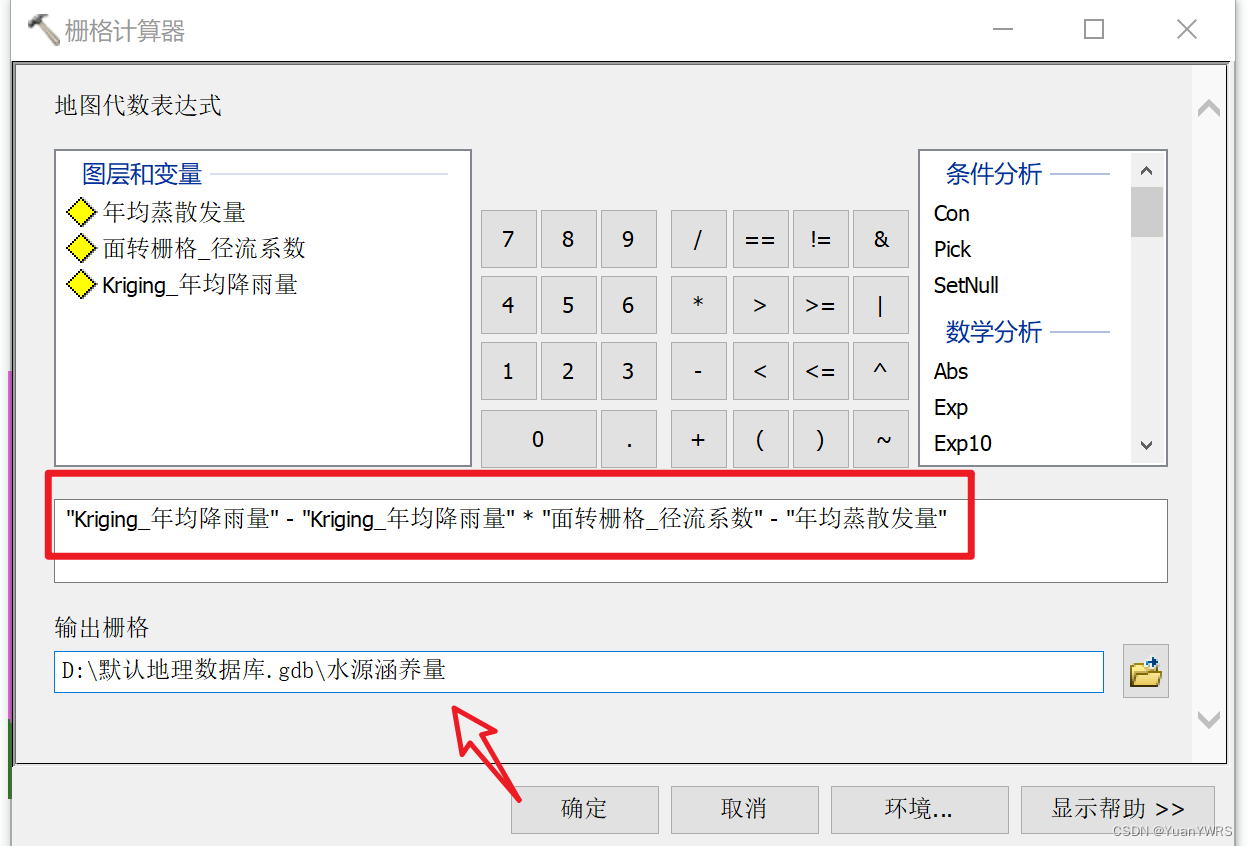
根据开头提到的公式,计算:年均降雨量(克里金)-年均降雨量(克里金)*径流系数(面转栅格)-年均蒸散发量。
得到水源涵养量结果。
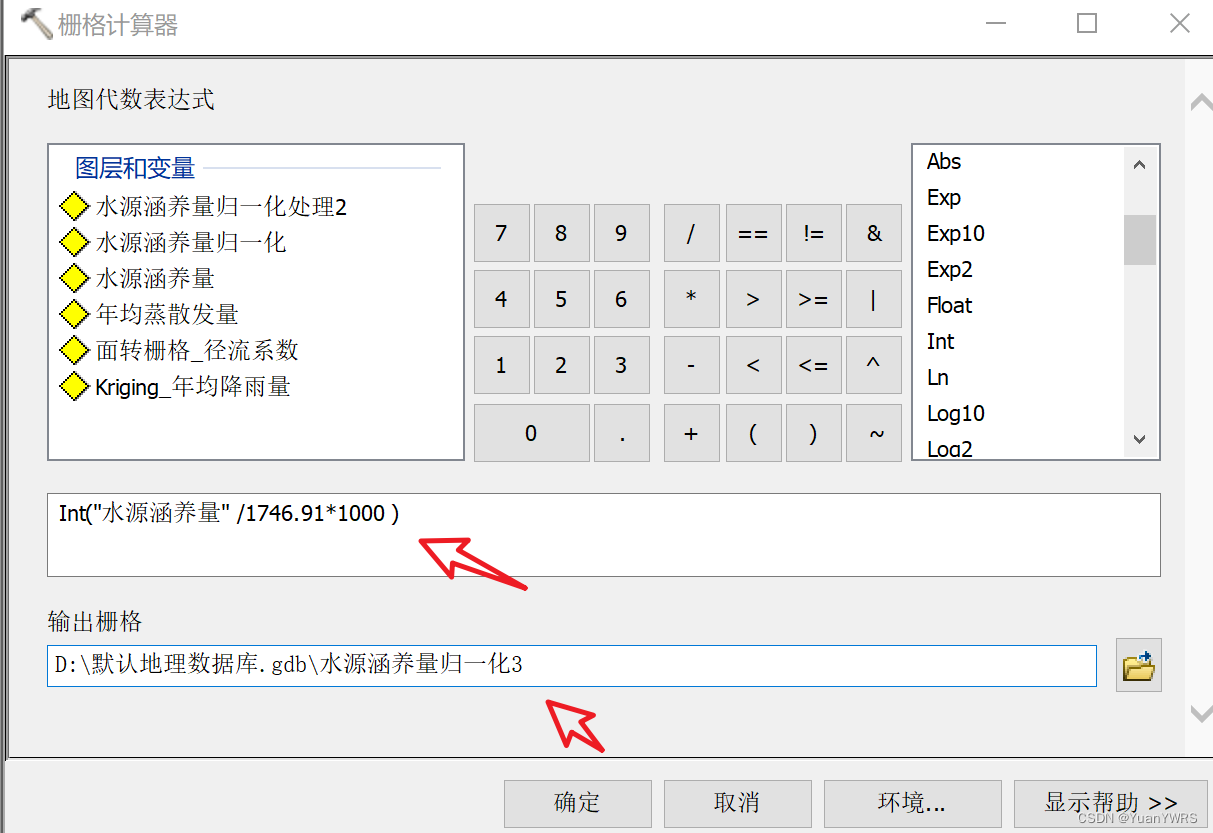
接下来,为了数据的方便使用,需要对得到的水源涵养量数据进行【归一化】处理,也就是到【0,1】之间,
但是为了提高数据的准确性,将数值【*1000】,把数据放大1000倍,得到归一化的结果。
接下来,将以上归一化的数据导出为.dbf格式。
先把值进行倒叙排列,然后根据【值*数量】得到水源涵养量。
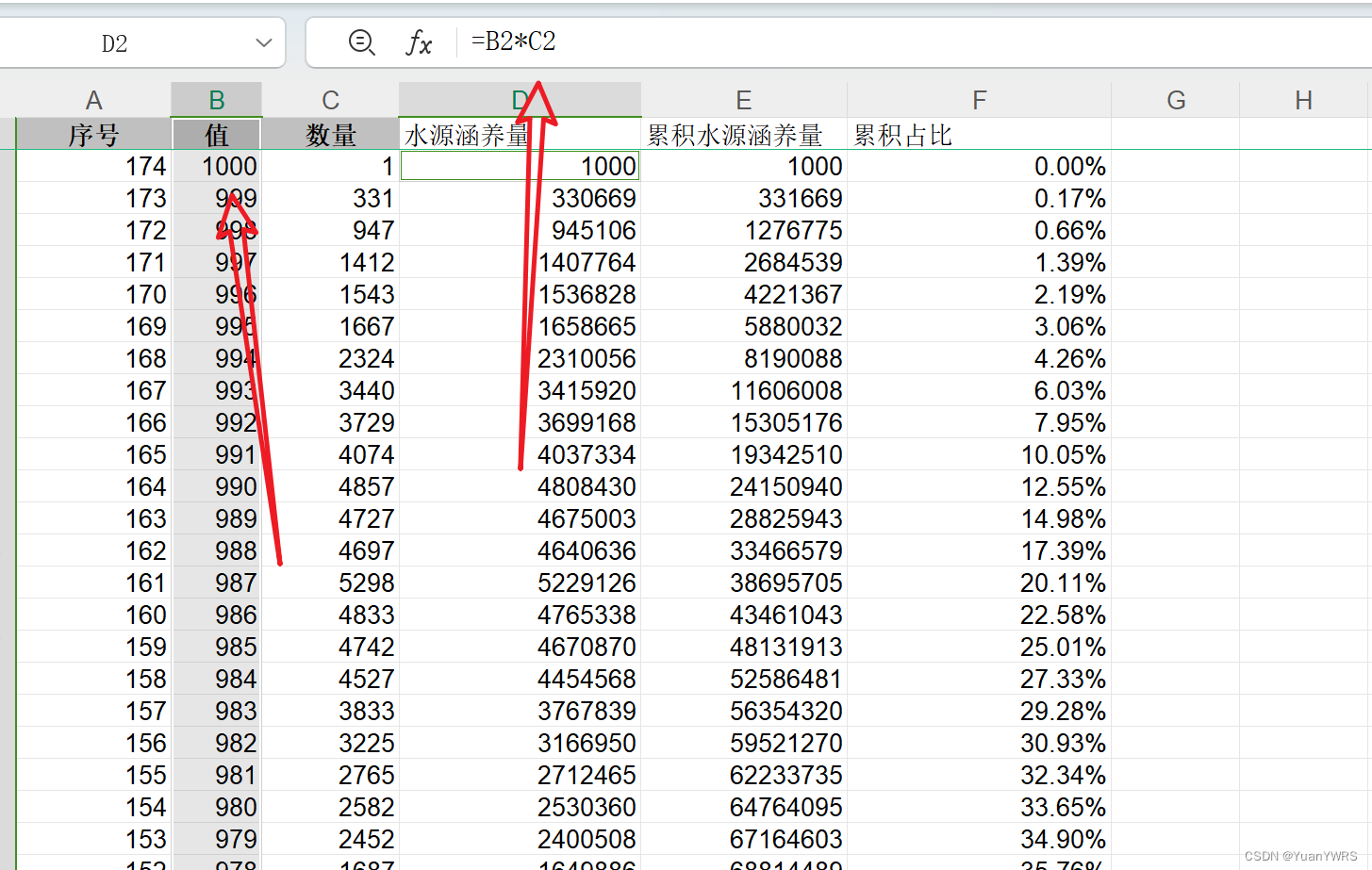
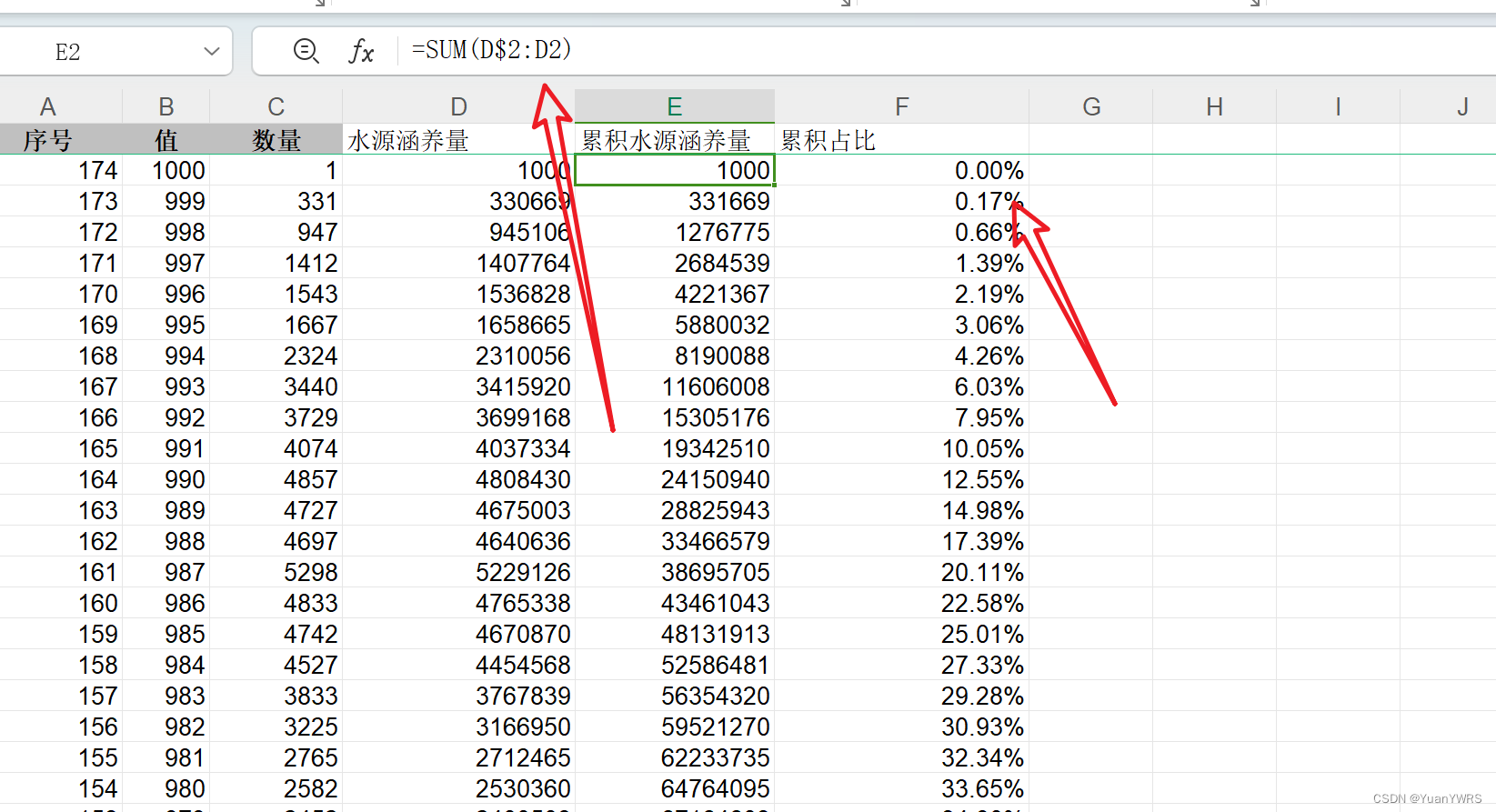
然后根据累加方法,把累积涵养量和占比得出。
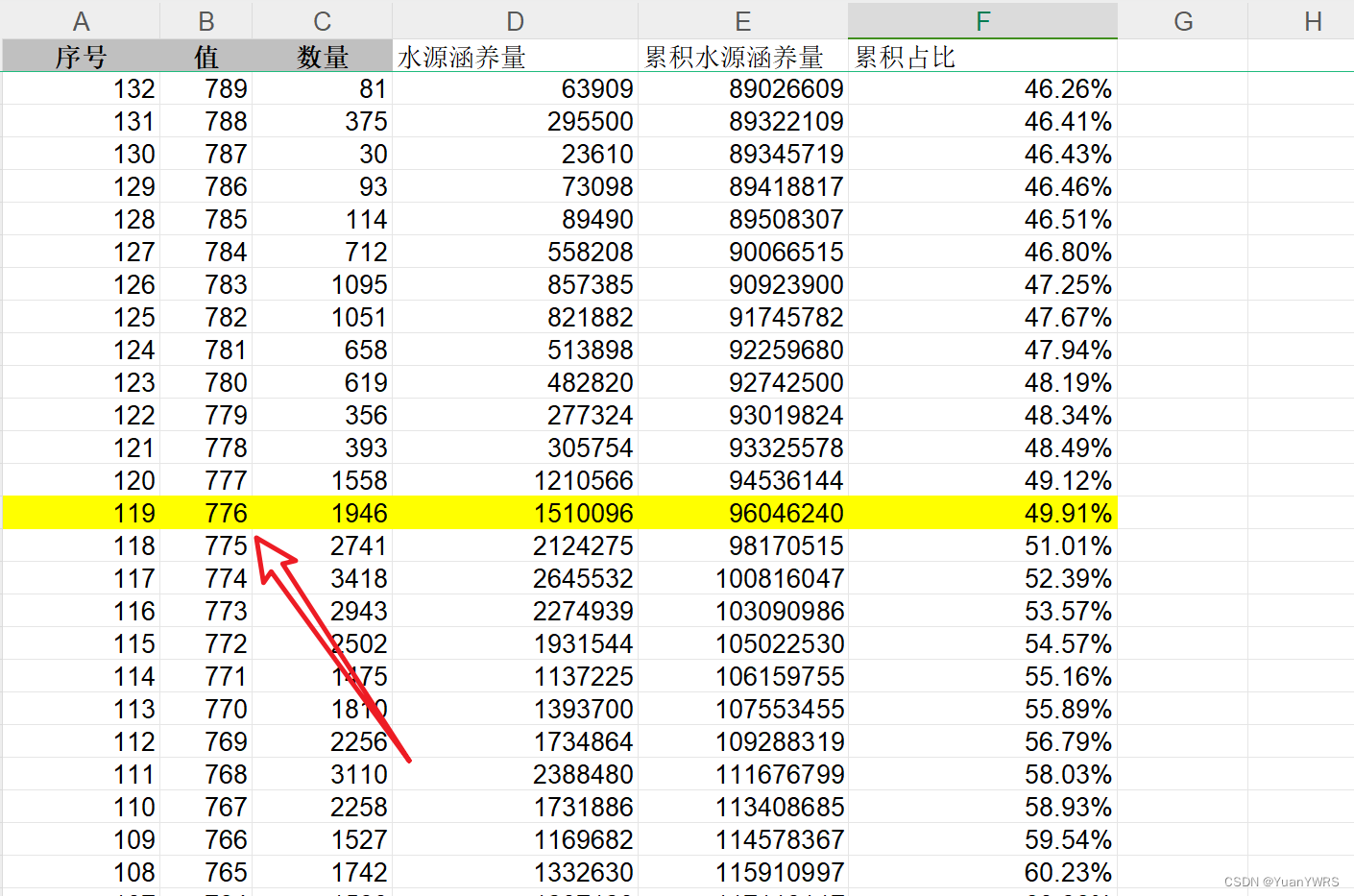
找出占比约等于50%的【值】,这里就是【776】,也就是分级点的值。
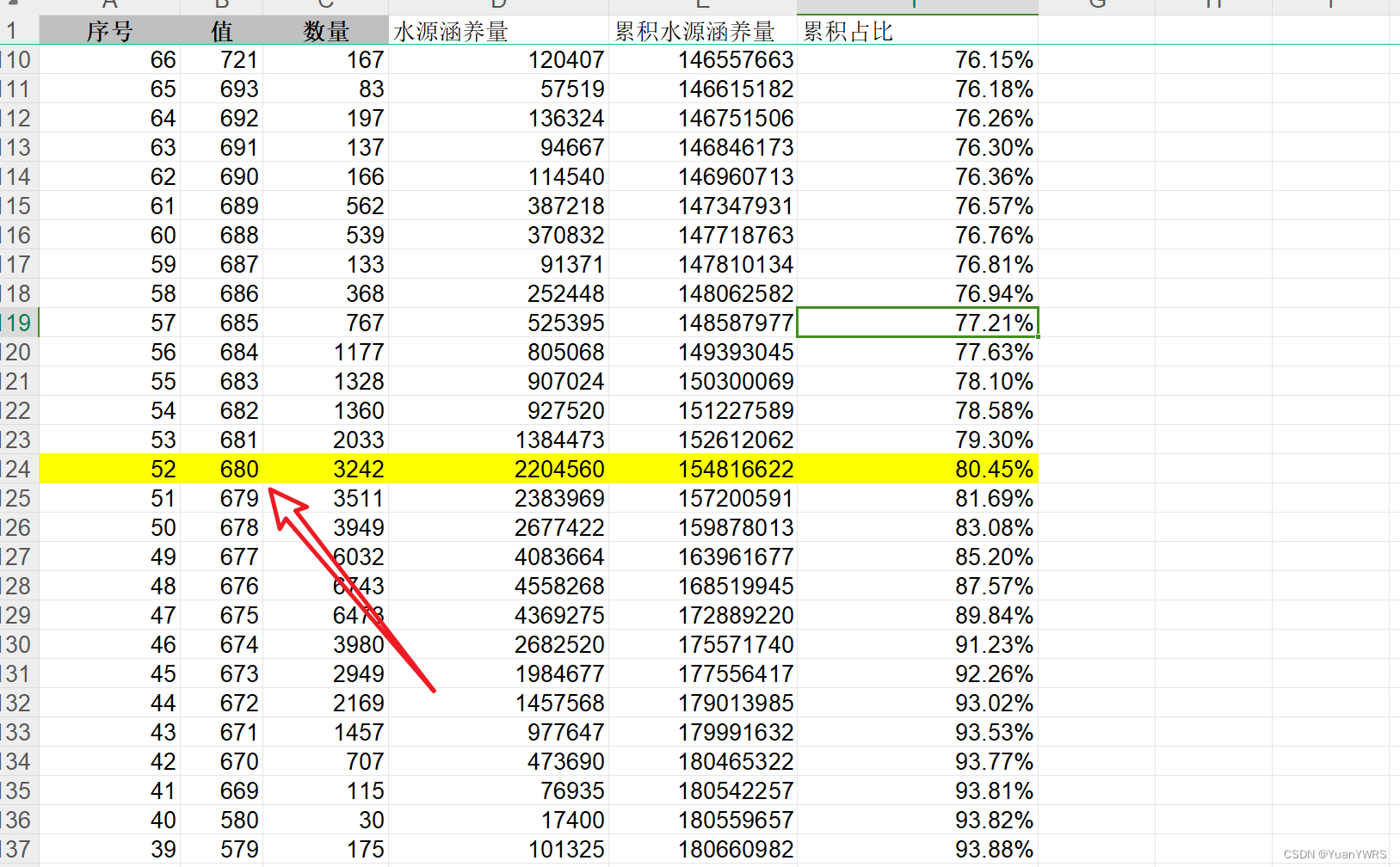
找出占比约等于80%的【值】,这里就是【680】,也就是另一个分级点的值。
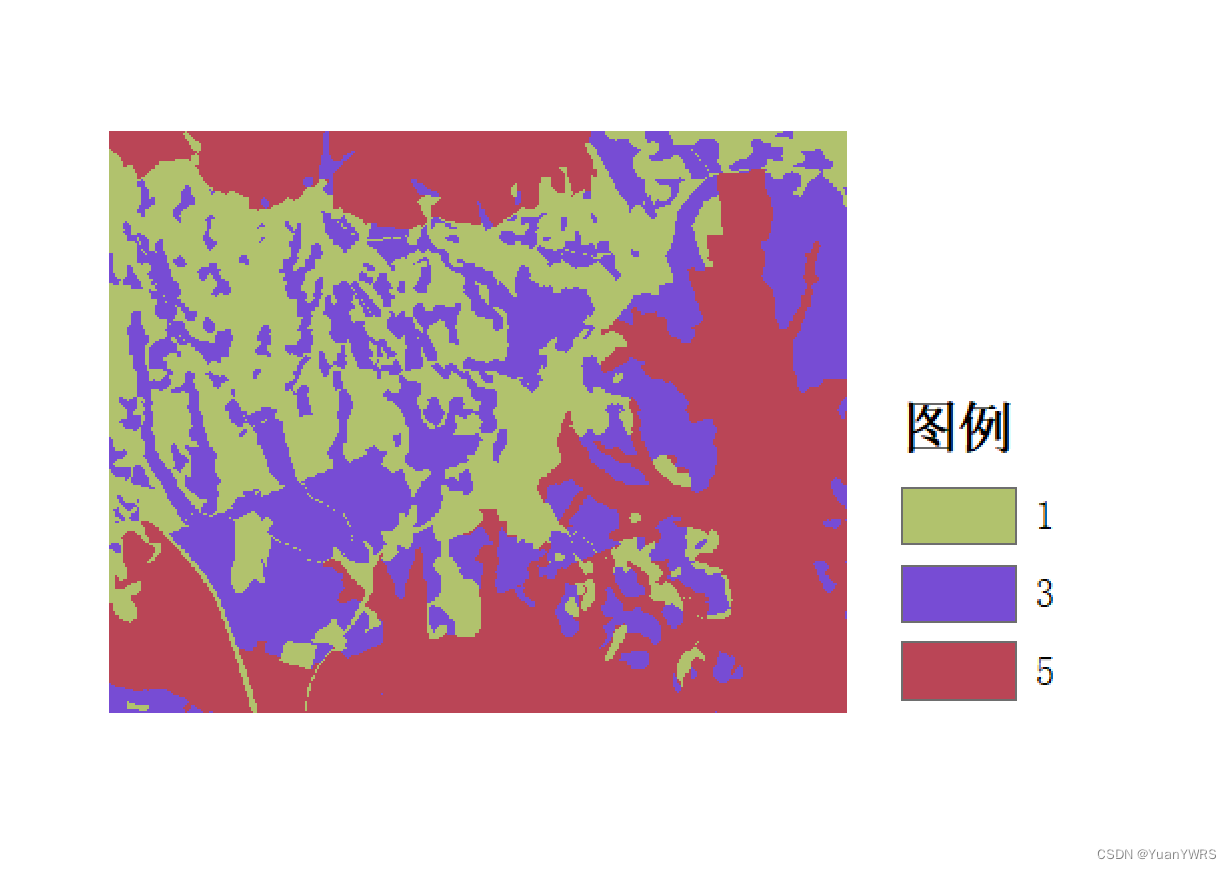
最后,使用重分类方法,得到分级评价图。
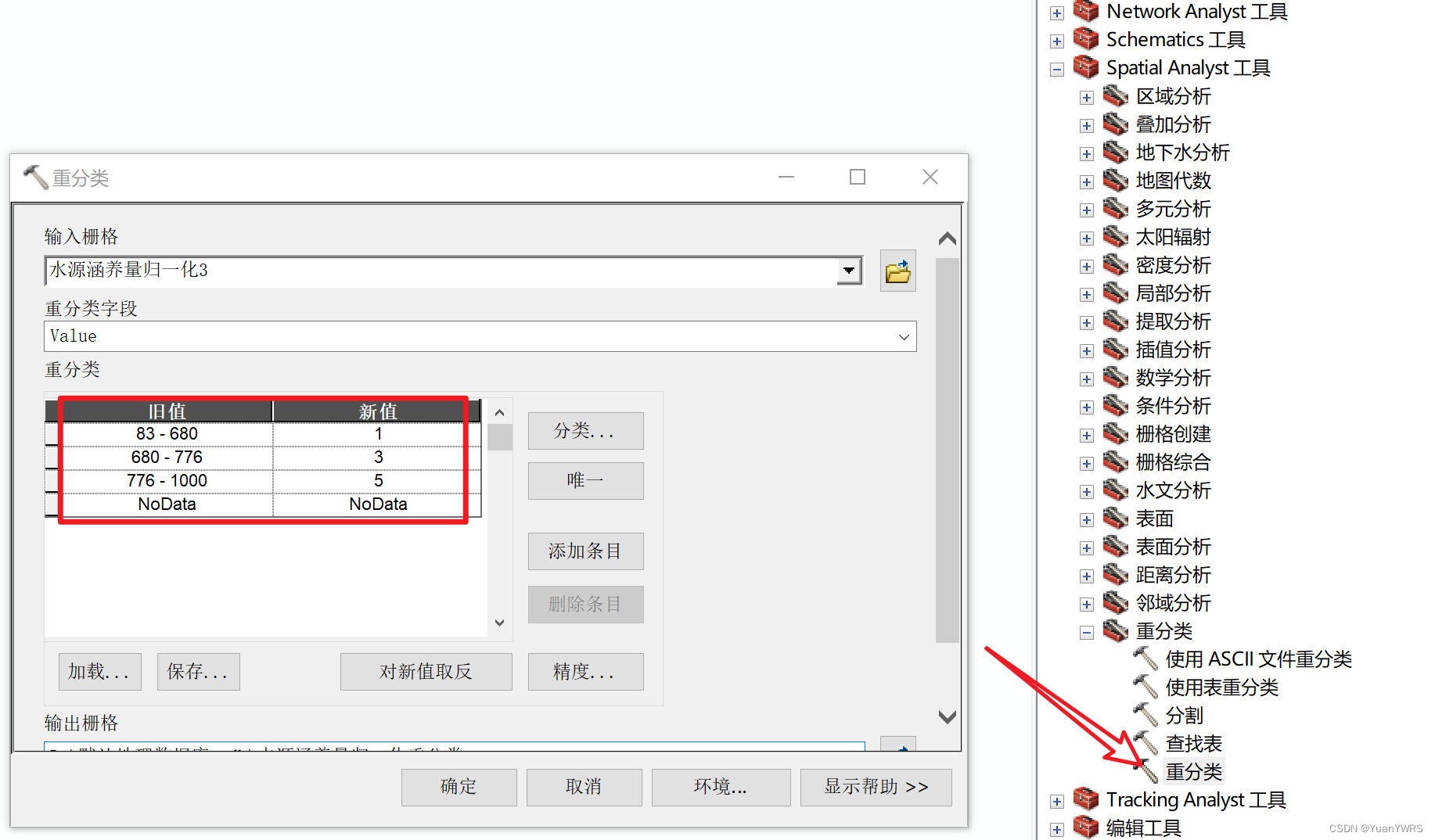
如下,得到最终的水源涵养功能的评价分级图,其中,1表示一般,2表示重要,5表示极其重要。

















 8322
8322

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









