







MVTN: Multi-View Transformation Network for 3D Shape Recognition
摘要
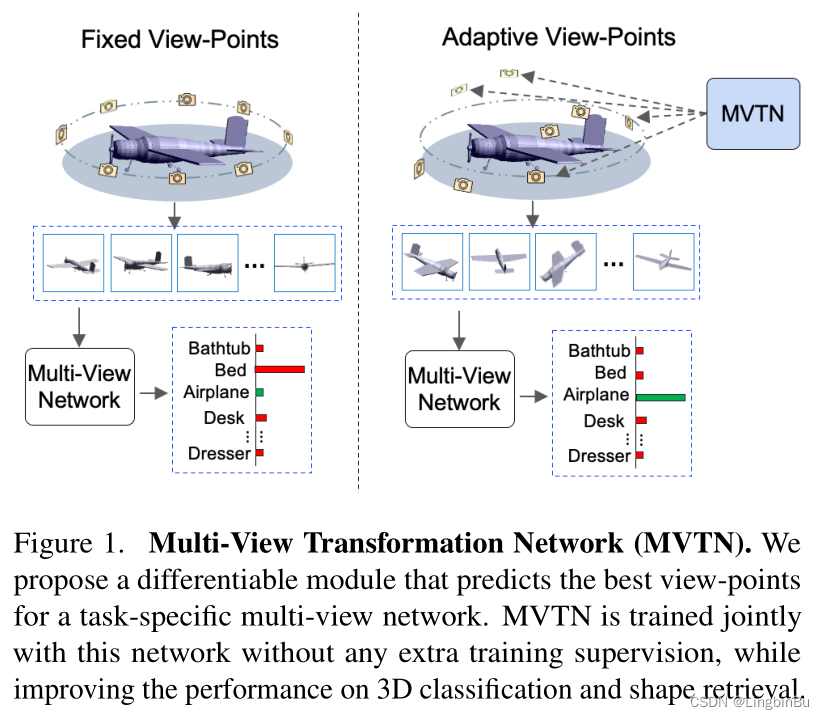
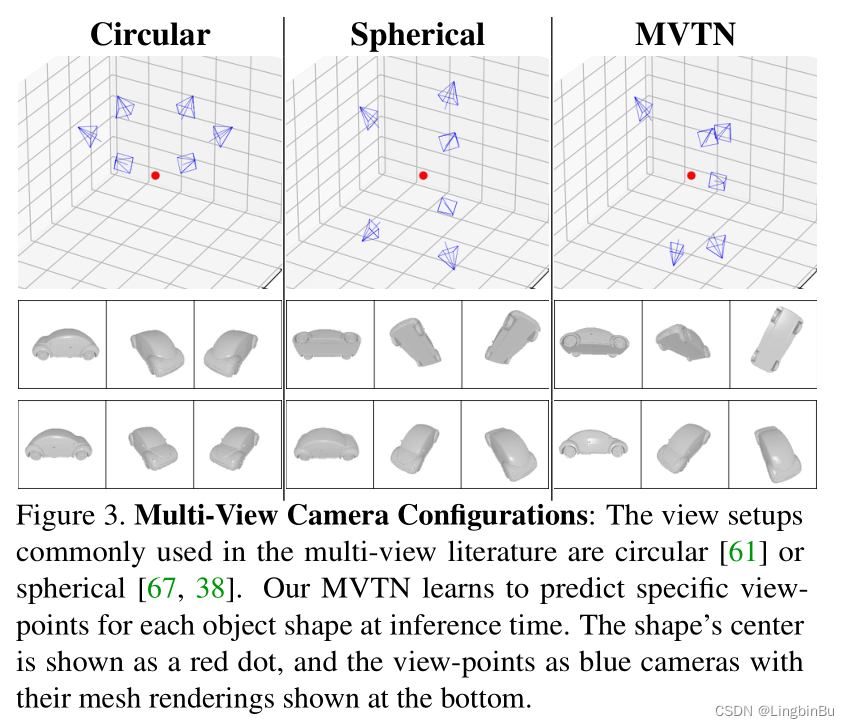
- 问题: 在众多的点云处理方法中,Multi-view projection 方法的视角往往是启发式地设置或者是对所有形状都是相同的设置。
- 方法: 提出了一种方法,学习如何更好地设置这些视角。
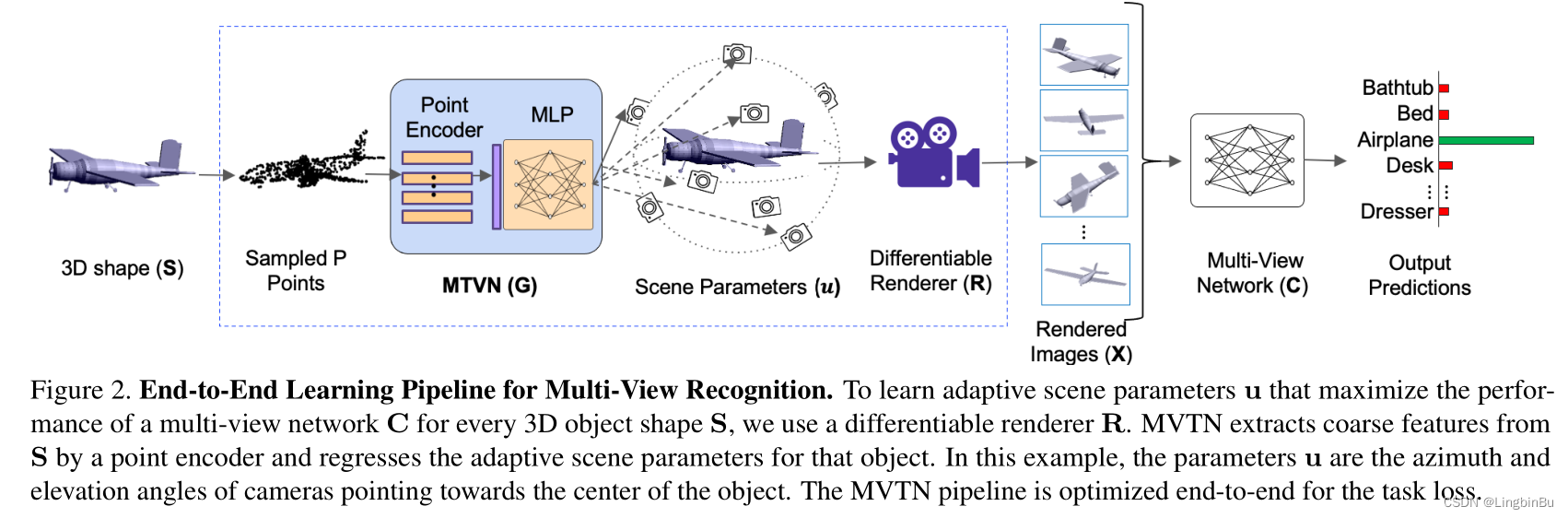
- 细节: 引入了 Multi-View Transformation Network (MVTN),用于寻找用于3D形状识别的最优视角,整个网络的设计都是可导的。MVTN可以通过端到端的形式进行训练,并搭配任意的多视角网络用于3D形状识别。本文将MVTN和一个新的适应性多视角网络进行整合,该网络不仅可以处理3D mesh,还可以处理点云。
- 代码: https://github.com/ajhamdi/MVTN Pytorch版本
相关工作
- MVTN学习输入数据的空间变换,学习的过程中不使用额外的监督,也不调整学习过程。
方法
Overview of Multi-View 3D Recognition
多视角网络的训练可以表示为:
arg
min
θ
C
∑
n
N
L
(
C
(
X
n
)
,
y
n
)
=
arg
min
θ
C
∑
n
N
L
(
C
(
R
(
S
n
,
u
0
)
)
,
y
n
)
\begin{aligned} & \underset{\boldsymbol{\theta}_{\mathbf{C}}}{\arg \min } \sum_{n}^{N} L\left(\mathbf{C}\left(\mathbf{X}_{n}\right), y_{n}\right) \\ =& \underset{\boldsymbol{\theta}_{\mathbf{C}}}{\arg \min } \sum_{n}^{N} L\left(\mathbf{C}\left(\mathbf{R}\left(\mathbf{S}_{n}, \mathbf{u}_{0}\right)\right), y_{n}\right) \end{aligned}
=θCargminn∑NL(C(Xn),yn)θCargminn∑NL(C(R(Sn,u0)),yn)
其中
L
L
L 是具体任务的损失函数,
N
N
N是数据集中3D形状的数量,
y
n
y_{n}
yn是第
n
n
n个3D形状
S
n
\mathbf{S}_{n}
Sn的label。
u
0
∈
R
τ
\mathbf{u}_{0} \in \mathbb{R}^{\tau}
u0∈Rτ是整个数据集的
τ
\tau
τ个场景参数集合,这些参数表示了影响渲染图片的性质,包括视点、光线、颜色和背景。
R
\mathbf{R}
R是渲染器,以形状
S
n
\mathbf{S}_{n}
Sn和参数
u
0
\mathbf{u}_{0}
u0作为输入,得到每个形状的
M
M
M个多视角图像
X
n
\mathbf{X}_{n}
Xn。在MVCNN中,
C
=
MLP
(
max
i
f
(
x
i
)
)
\mathbf{C}=\operatorname{MLP}\left(\max _{i} \mathbf{f}\left(\mathbf{x}_{i}\right)\right)
C=MLP(maxif(xi)),
f
:
R
h
×
w
×
c
→
R
d
\mathbf{f}: \mathbb{R}^{h \times w \times c} \rightarrow \mathbb{R}^{d}
f:Rh×w×c→Rd是一个2D CNN backbone;在ViewGCN中,
C
=
MLP
(
c
a
t
G
C
N
(
f
(
x
i
)
)
)
\mathbf{C}=\operatorname{MLP}\left(\right. cat \left._{\mathrm{GCN}}\left(\mathbf{f}\left(\mathbf{x}_{i}\right)\right)\right)
C=MLP(catGCN(f(xi))),
c
a
t
G
C
N
cat _{\mathrm{GCN}}
catGCN是从图卷积网络中学习到的视图特征聚合。
θ
C
\boldsymbol{\theta}_{\mathbf{C}}
θC是多视图网络
C
\mathbf{C}
C的参数。在实验部分,场景参数
u
\mathbf{u}
u表示成指向目标中心的相机视角的方位角(azimuth) 和仰角 (elevation) angles,因此
τ
=
2
M
\tau=2M
τ=2M
Multi-View Transformation Network (MVTN)
之前的多视图方法都是以图像 X \mathbf{X} X作为3D形状的唯一表示,其中 X \mathbf{X} X是使用固定的场景参数 u 0 \mathbf{u}_0 u0得到的。相反,本文考虑一个更通用的情况,将 u \mathbf{u} u设置成边界为 ± u bound \pm \mathbf{u}_{\text {bound }} ±ubound 内的变量,其中 u bound \mathbf{u}_{\text {bound }} ubound 是正数,定义了场景参数的允许范围。将每个方位角和仰角的 u bound \mathbf{u}_{\text {bound }} ubound 分别设置为 18 0 ∘ 180^{\circ} 180∘ 和 9 0 ∘ 90^{\circ} 90∘。
Differentiable Renderer
渲染器 R \mathbf{R} R以3D形状 S \mathbf{S} S(mesh or point cloud)和场景参数 u \mathbf{u} u作为输入,输出是对应的 M M M个图像 { x i } i = 1 M \left\{\mathbf{x}_{i}\right\}_{i=1}^{M} {xi}i=1M。由于 R \mathbf{R} R可导,梯度 ∂ x i ∂ u \frac{\partial \mathbf{x}_{i}}{\partial \mathbf{u}} ∂u∂xi可以从每个图像反向传播到整个场景参数,因此能够构造一个端到端的学习框架。
当 S \mathbf{S} S表示为3D mesh时, R \mathbf{R} R有两个分量:rasterizer 和 shader。首先,在给定相机视角和将face分配给像素后,rasterizer将mesh从世界坐标系变换到视图坐标系中。然后shader根据face的分配对每个像素创建多个值,并将这些值进行融合。
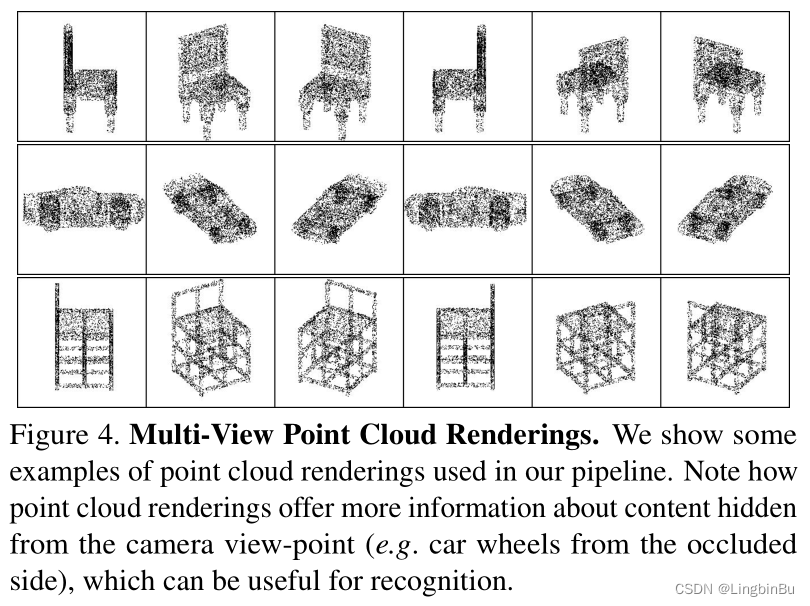
当 S \mathbf{S} S表示为点云时, R \mathbf{R} R可以使用alpha-blending mechanism。
View-Points Conditioned on 3D Shape
通过学习Multi-View Transformation Network (MVTN)
G
∈
R
P
×
3
→
R
τ
\mathbf{G} \in \mathbb{R}^{P \times 3} \rightarrow \mathbb{R}^{\tau}
G∈RP×3→Rτ和参数
θ
G
\boldsymbol{\theta}_{\mathbf{G}}
θG,将
u
\mathbf{u}
u设计成3D形状的函数,其中
P
P
P是从形状
S
\mathbf{S}
S采样得到点的数量。MVTN的训练可以表示为:
arg
min
θ
C
,
θ
G
∑
n
N
L
(
C
(
R
(
S
n
,
u
n
)
)
,
y
n
)
s. t.
u
n
=
u
bound
⋅
tanh
(
G
(
S
n
)
)
\begin{aligned} \underset{\boldsymbol{\theta}_{\mathbf{C}}, \boldsymbol{\theta}_{\mathrm{G}}}{\arg \min } & \sum_{n}^{N} L\left(\mathbf{C}\left(\mathbf{R}\left(\mathbf{S}_{n}, \mathbf{u}_{n}\right)\right), y_{n}\right) \text { s. t. } \quad \mathbf{u}_{n}=\mathbf{u}_{\text {bound }} \cdot \tanh \left(\mathbf{G}\left(\mathbf{S}_{n}\right)\right) \end{aligned}
θC,θGargminn∑NL(C(R(Sn,un)),yn) s. t. un=ubound ⋅tanh(G(Sn))
其中
G
\mathbf{G}
G对3D形状进行编码,预测具体任务多视图网络
C
\mathbf{C}
C的最优视点。由于
G
\mathbf{G}
G的目标仅仅是预测视点所以
G
\mathbf{G}
G的结构很简单,并且很轻量。与此同时,在
G
\mathbf{G}
G中还使用了简单的点编码器(比如PointNet中的shared MLP),用于处理从
S
\mathbf{S}
S得到的
P
P
P个点,并且生成维度为
b
b
b的coarse形状特征。然后shallow MLP从这个全局形状特征中回归出场景参数
u
n
\mathbf{u}_n
un,为了将预测参数
u
\mathbf{u}
u的数值强制放入
±
u
bound
\pm \mathbf{u}_{\text {bound }}
±ubound 范围内,使用了tanh函数将
u
\mathbf{u}
u缩放到
±
u
bound
\pm \mathbf{u}_{\text {bound }}
±ubound 内。
MVTN for 3D Shape Classification
为了对MVTN进行训练,用于3D形状分类,我们定义了一个交叉熵损失函数,但是其他的损失函数和正则项也可以用。多视角网络( C \mathbf{C} C)和MVTN( G \mathbf{G} G)使用相同的损失函数共同训练。我们的网络结构的优点在于能够处理3D点云。当 S \mathbf{S} S是一组点云时,简单地将 R \mathbf{R} R定义为一个可导地点云渲染器。
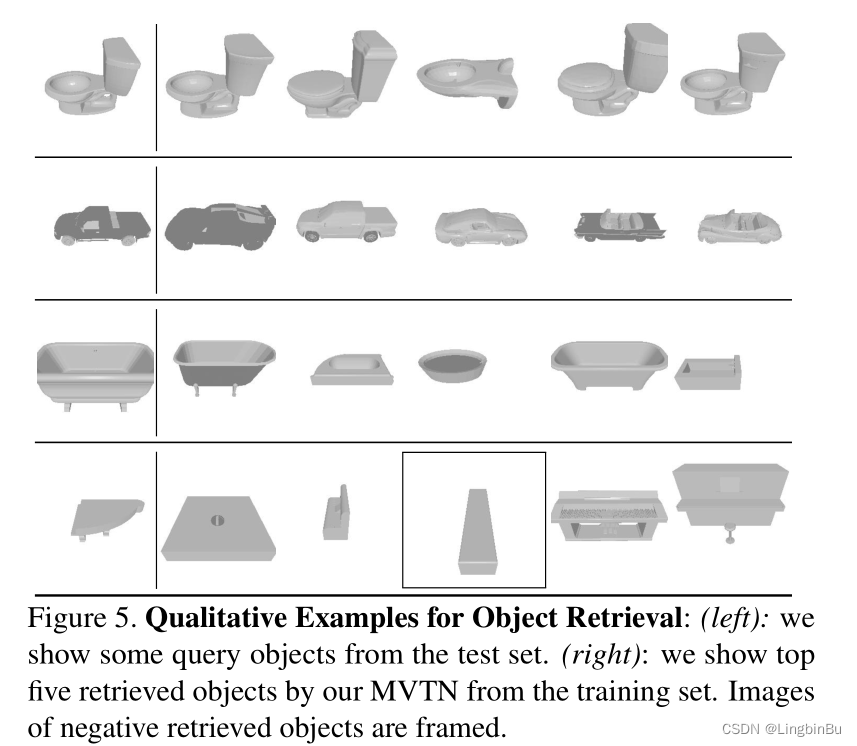
MVTN for 3D Shape Retrieval
我们考虑 C \mathbf{C} C中分类器前面最后一层的特征表示,使用LFDA reduction将这些特征投影到其他空间,并且将处理后的特征作为signature描述一个形状。在测试阶段,形状signature被用于在测试集中检索最相似的形状。
实验
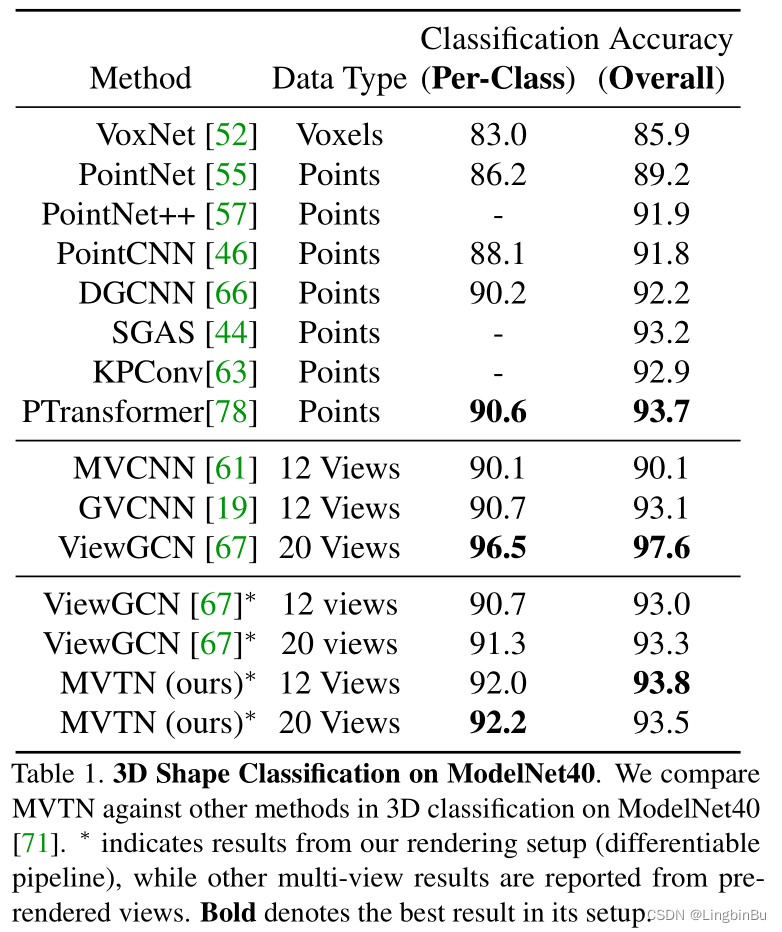
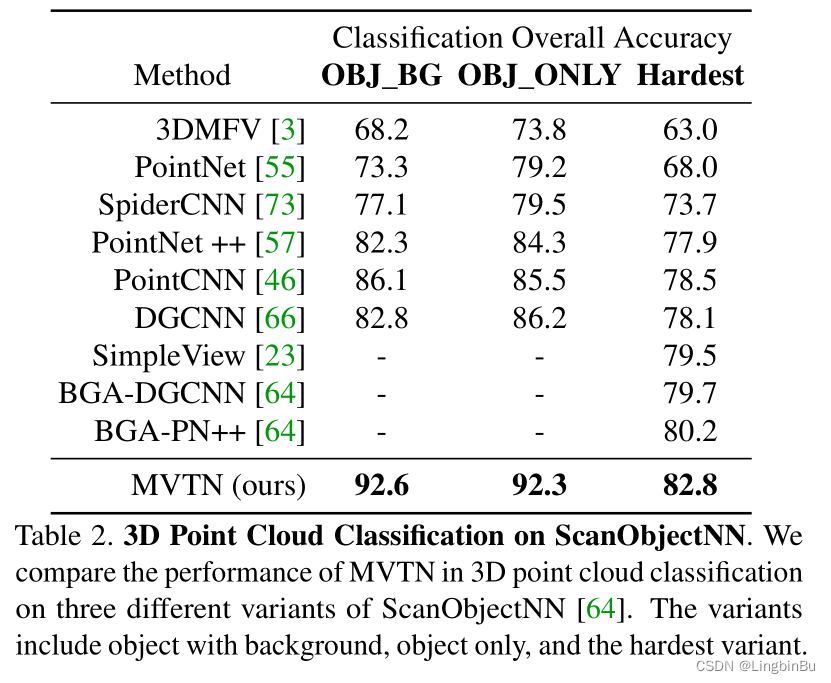
3D Shape Classification
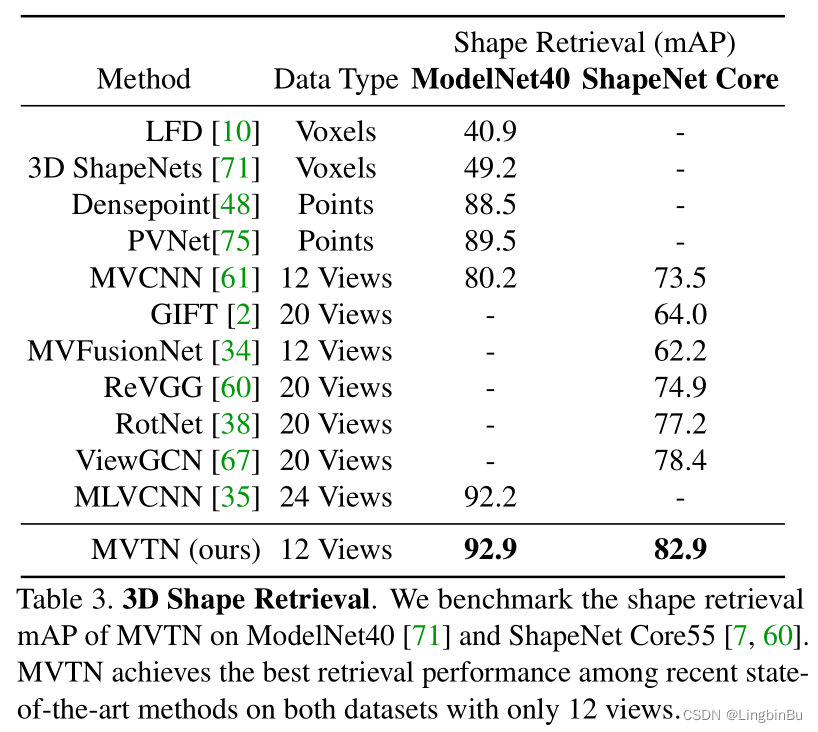
3D Shape Retrieval
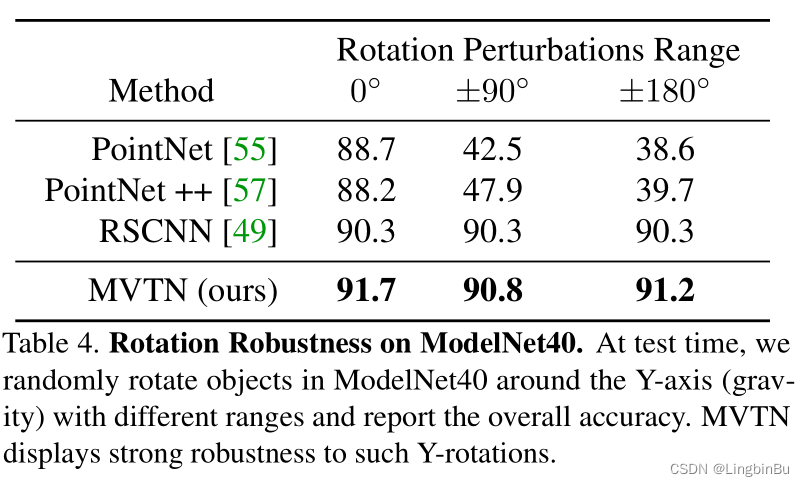
Rotation Robustness
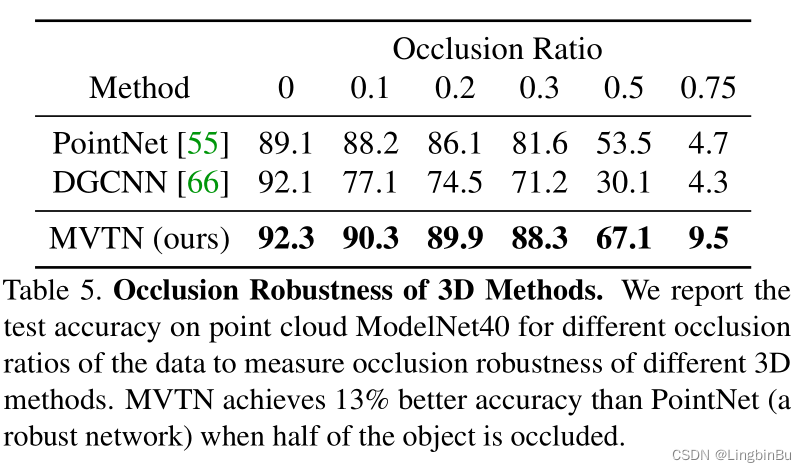
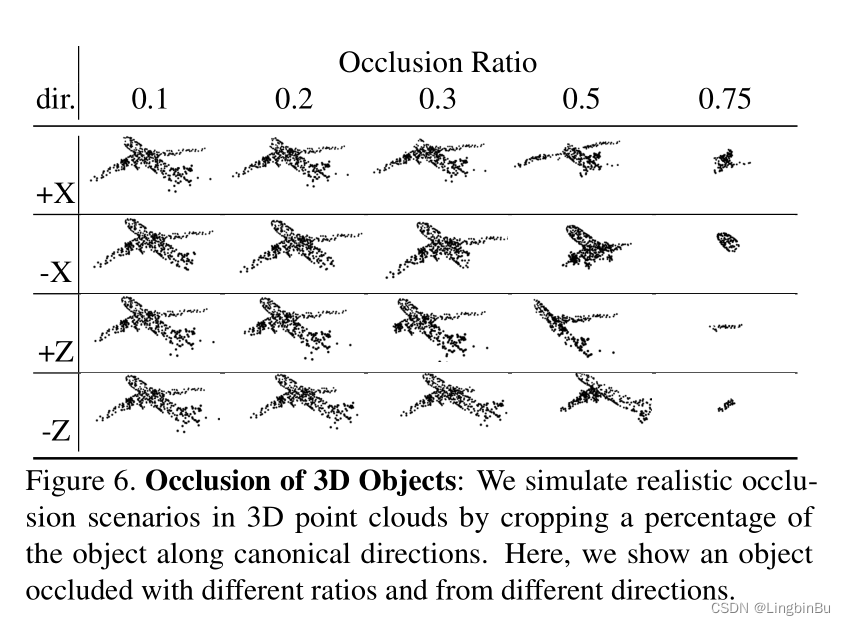
Occlusion Robustness
Ablation Study
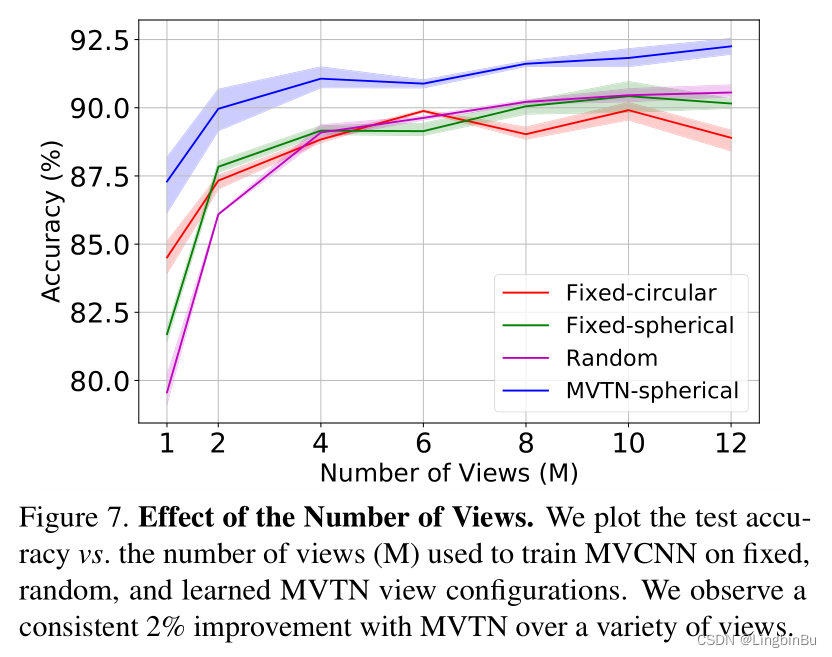
Number of Views
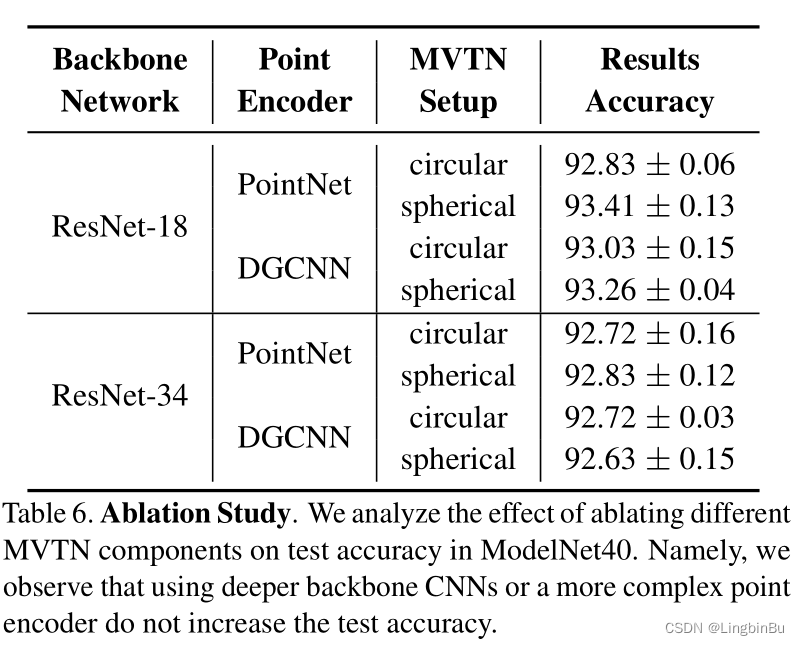
Choice of Backbone and Point Encoders
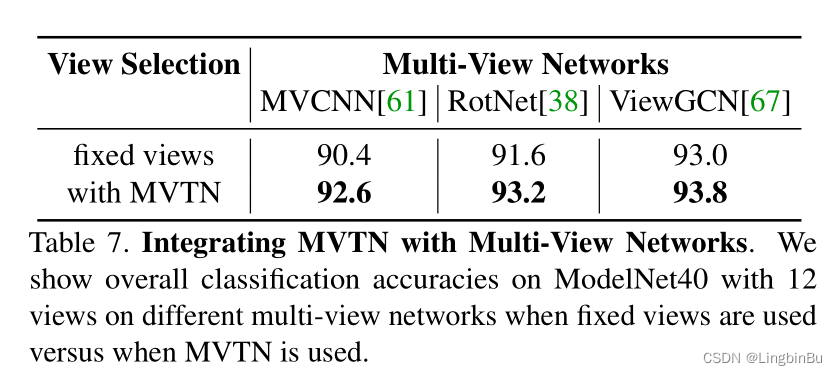
Choice of Multi-View Network
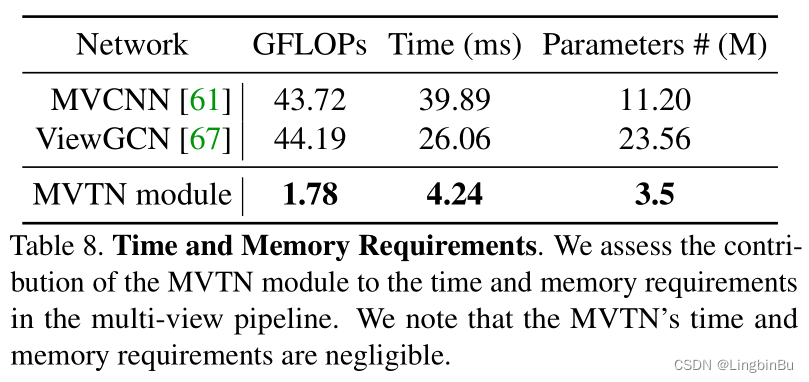
Time and Memory Requirements















 1419
1419











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









