






 本文详细介绍了视觉成像中的3D坐标如何通过相机坐标系和图像坐标系转换为像素坐标,包括径向畸变和切向畸变的解释,以及内参矩阵和外参矩阵在标定过程中的作用。
本文详细介绍了视觉成像中的3D坐标如何通过相机坐标系和图像坐标系转换为像素坐标,包括径向畸变和切向畸变的解释,以及内参矩阵和外参矩阵在标定过程中的作用。
在这篇文章里面,我们会讨论视觉成像理论,以及现实世界中的3D坐标如何转换成照片图像中的相应坐标2d pixel坐标,语言十分通俗,对初学者很友好
目录
1. 世界坐标体系 World Coordinate System
2. 相机坐标体系 Camera Coordinate System
3. 图像坐标体系 Image Coordinate System
0. 相机导致的画面畸变 Distortion
针孔相机会引起画面的畸变,一共有两大种类的畸变:
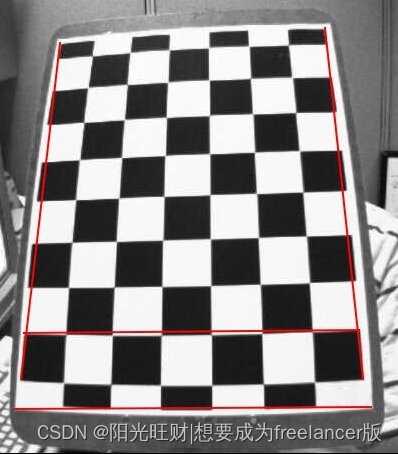
1. 径向畸变 Radial distortion
导致直线变弯,离镜头中心越远的点, 产生的畸变越多. 比如下图的棋盘格中的红线是直线,但是他对应的线条是曲线
2. 切向畸变 Tangential distortion
由于照照片的棱镜与成像平面不是完全平行的,所以画面中某些部分看起来比实际上更近
公式里面提到的畸变系数如下所示:
除此之外,我们还需要额外的信息,比如相机的内参以及外参矩阵,这些都会在后面详细介绍,内参矩阵其中包含焦距(fx,fy)光学中心焦点(cx,cy),内参矩阵可以用于消除由于相机带来的畸变,它可以被同样相机的使用情景下重复使用。
对于立体视觉标定应用,需要首先校正这些失真(畸变)为了找到这些参数,我们必须提供一些已知的明确的样本图像(例如棋盘格)。我们找到一些我们已经知道其相对位置的特定点(例如棋盘上的方角corner,两个黑色块块相交的角)。我们知道这些点在现实世界空间中的坐标,并且我们知道图像中的坐标,因此我们可以求解失真系数。
为了获得更好的结果,我们至少需要 10 个测试图像。
1. 世界坐标体系 World Coordinate System
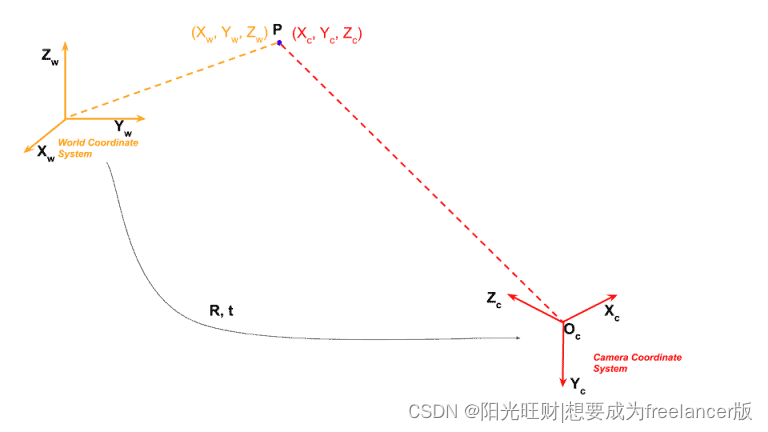 假如我们现在在一个房间中,我们想要标定某个点的坐标,第一步就是在现实世界找到坐标系和原点,假设把房间的东北角设为原点,向东是y, 向北是x,向上是z,我们就有了初始的世界坐标系,房间中任意一点P的坐标是(Xw,Yw,Zw),我们只需要测量两点之间的距离就可以得出来了
假如我们现在在一个房间中,我们想要标定某个点的坐标,第一步就是在现实世界找到坐标系和原点,假设把房间的东北角设为原点,向东是y, 向北是x,向上是z,我们就有了初始的世界坐标系,房间中任意一点P的坐标是(Xw,Yw,Zw),我们只需要测量两点之间的距离就可以得出来了
2. 相机坐标体系 Camera Coordinate System
我们在房间中放置一个相机,当然我们可以把相机也以同样的世界坐标系方向放置,而且要放置在世界坐标的原点,这样可以实现照相机坐标系与世界坐标系的统一。
我们希望的是相机在房间中随意放置,观察我们想要的方向。所以我们需要引入两个矩阵:
R 旋转矩阵 Rotation Matrix
t平移向量 Translation Vector
只要把它们旋转和平移就可以得到相同的坐标系和原点。R是3×3的矩阵,有九个元素,但是旋转其实只有三个自由度,先记住这个奇怪的配置。T有三个方向上的平移量,于是相机坐标系上的点Pc(Xc,Yc, Zc)可以表示成:
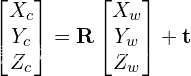
有时会写成一个更复杂的形式,t写成3×1的一列跟在R后面:
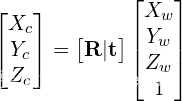
外参矩阵 extrinsic matrix
![]()
为了方程的齐次,我们在世界坐标系上的点加上了一个次数, (Xw, Yw, Zw)->(Xw, Yw, Zw, 1)
3. 图像坐标体系 Image Coordinate System
在相机坐标系下的(Xc,Yc,Zc)需要找到在成像图像上的相应位置。下面为大家说明方法下图显示了简单针孔相机Simple Pin Hole Camera情况下的相机投影:
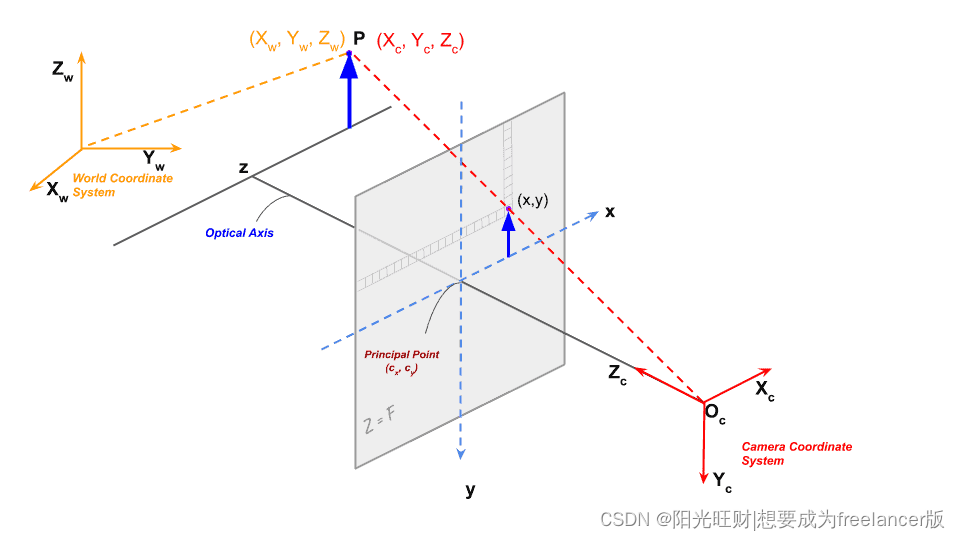
针孔摄像机的光学中心是Oc,在现实世界中,通过这个孔会形成一个相反的像,理论上我们应该把形成的像旋转180度,但是这不是必须的,因为真实的相机传感器会以相反的顺序读取成像,从下到上,从右到左,于是图像的顺序会变正确。所以在这里一切从简,我们不考虑这个问题
成像平面Image Plane(上图灰色的部分)位于距离光学中心Oc(上图xy坐标系的原点)的焦距focal length f处,运用大家聪明的脑袋瓜子以及高中相似三角形(俺不知道是不是叫这个了都),就可以得出相机坐标系上的Pc (Xc,Yc,Zc)在图像上的点(x,y)的关系是:
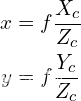
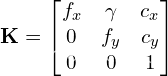
可以写成如下的矩阵:
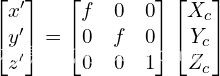
此矩阵就是大名鼎鼎的内参矩阵 Intrinsic Matrix K
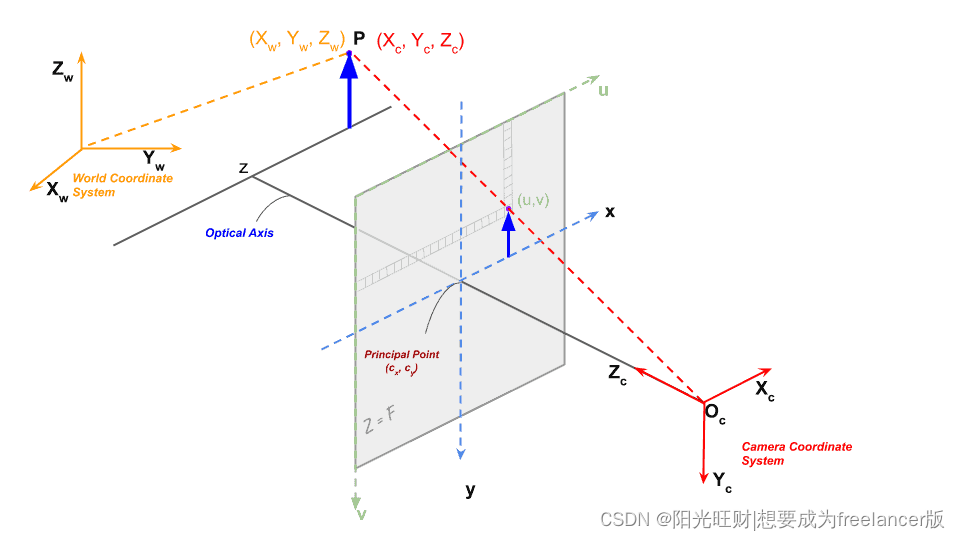
相机传感器的分辨率pixel不一定是相等的,所以x和y方向上的focal length也是不同的,他们是fx,fy。真实的光学中心点在灰色图像的中心,这和成像图片的坐标系(u,v)不匹配。
何以见得,打开任意一张照片,把鼠标放置在左上方,一般会显示(0,0),此为照片的原点。
所以灰色图像光学坐标中心在最后的成像坐标系(u,v)中其实是(Cx,Cy),因为左上角是原点
此外,x和y坐标轴上会有轻微的偏斜skew
最后成品版本的相机外参矩阵如下:
图像上的2D pixel点(u,v)可以表示成:
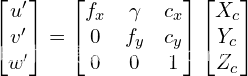
where,

4. 总结
step1:利用外参矩阵(其中包含旋转矩阵和平移向量),把真实世界的点投影到相机世界
step2:利用内参矩阵(相机内置参数,比如焦距,光学中心),把相机世界的点投射到2d pixel的图像世界
ps :欢迎大家点赞收藏,点赞真的很激励本大懒蛋创作















 2116
2116











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









