







一:有感
坚持就是力量,每天进步一点点,若干天后就会有大的突破
二:开始学习
今天学习VisionMaster中的灰度匹配:灰度匹配模块基于物体灰度特征进行特征匹配。由于不使用边缘点作为特征,该模块适用于在边缘点不明显的场景中进行物体定位、物体方向识别、物体角度检测等检测工作。
功能优势
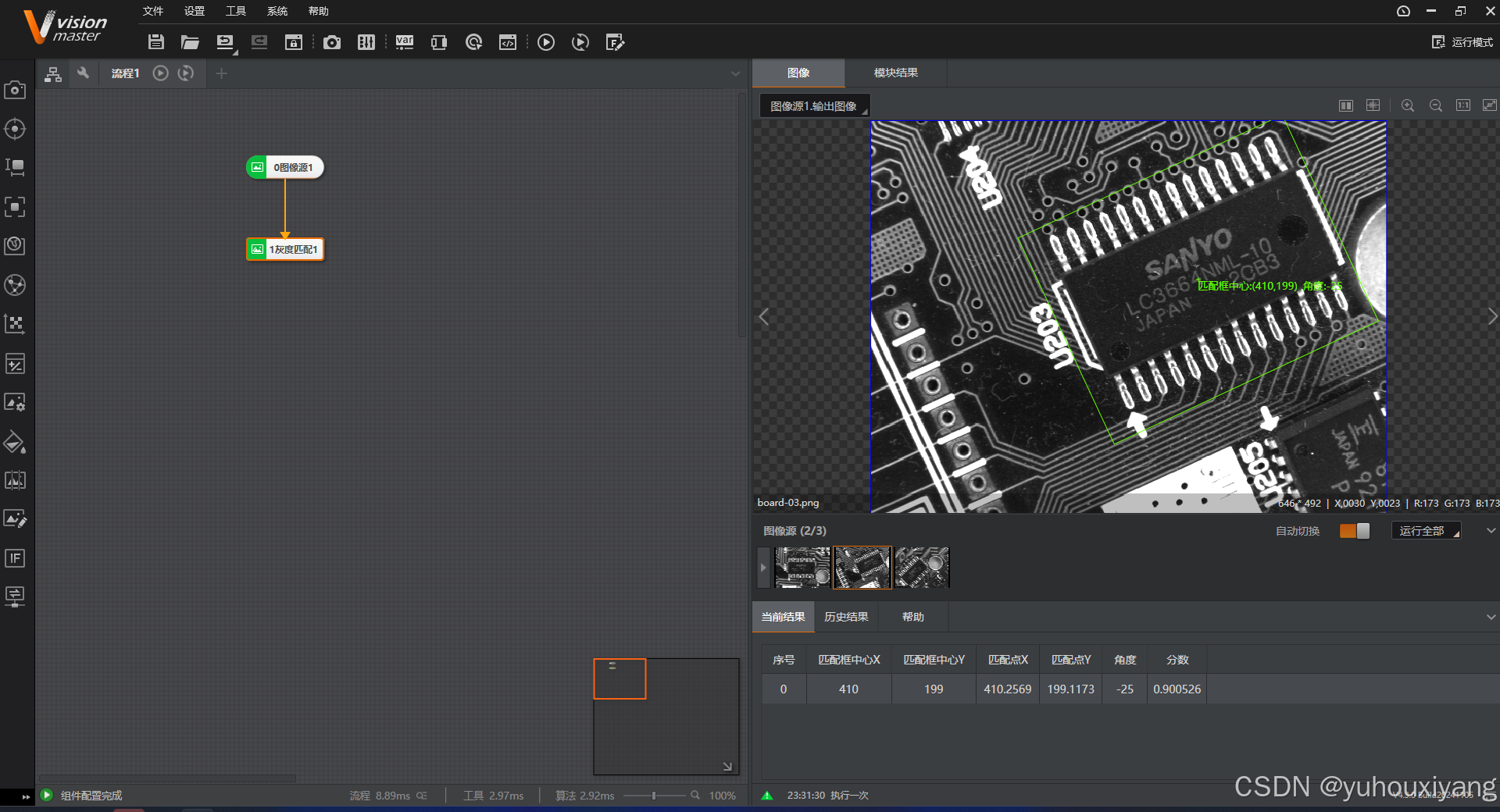
灰度匹配相较于“基于轮廓点信息”的高精度匹配、快速匹配和轮廓匹配,在光源发生变化或者相机曝光时间发生变化的情况下,依然可以匹配到目标物体
三:开始
1:先导入需要测试的图片集合,这部分不说了
2:使用快速匹配,把两个组件的线连起来,然后双击快速匹配图标进入设定菜单
3:然后和之前一样需要创建模版:灰度匹配是基于物体的灰度信息,所以参数和之前介绍的轮廓有点不太一样了

4:使用ROI工具将需要当做模版的部分框选进去
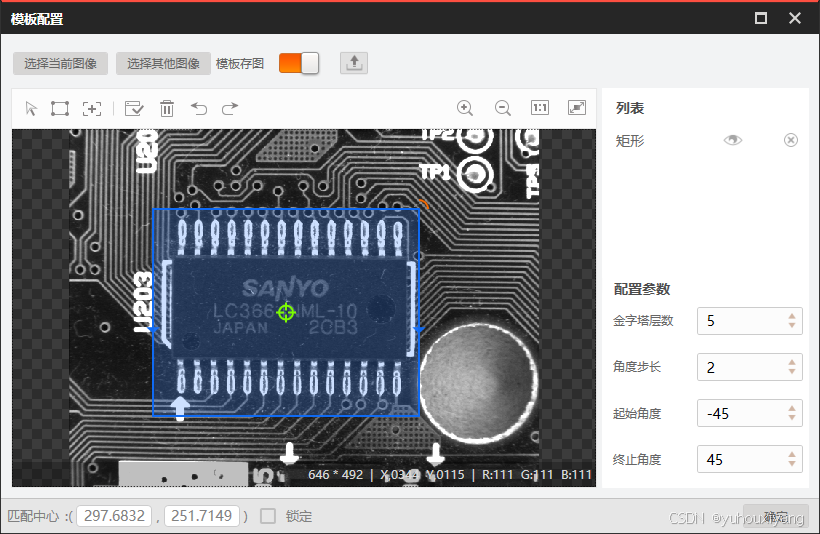
5:设定参数:灰度匹配参数也比较简单,下面介绍下参数怎么设置
(1)金字塔层数
设置图像金字塔的最大层数(在必要情况下,算法将根据输入的模板图像适当减少层数)。金字塔层数越多则匹配效率越高,但匹配精度可能下降;越少则匹配效率越低,但匹配精度更高。
建模过程中,模板图像可旋转的角度范围。
模板图像旋转的角度间隔。角度步长越小则匹配结果的角度越精确,但耗时越长,且模型容量越大;角度步长越大则匹配结果的角度精度越低,但匹配效率越高,且模型容量越小。
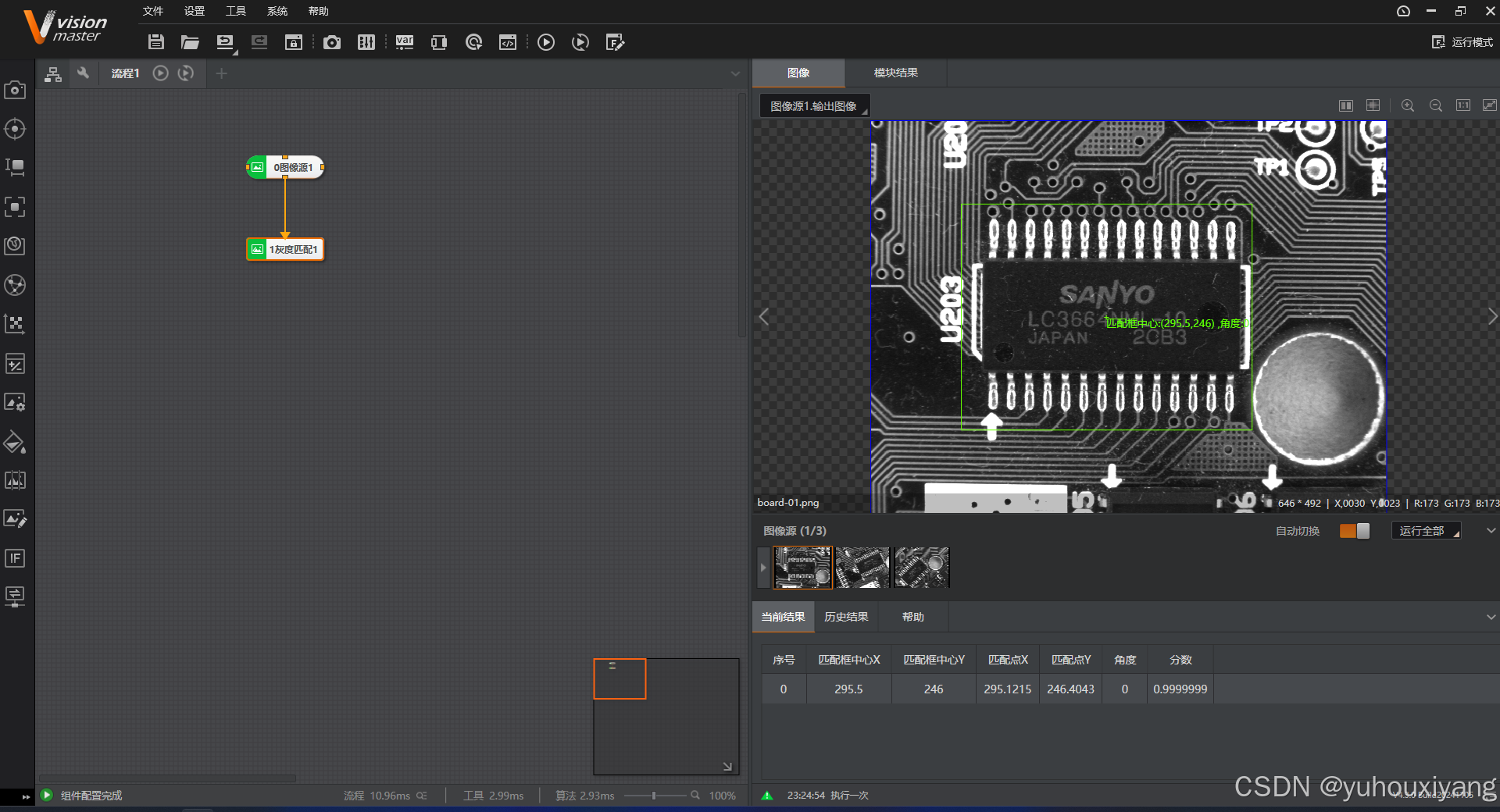
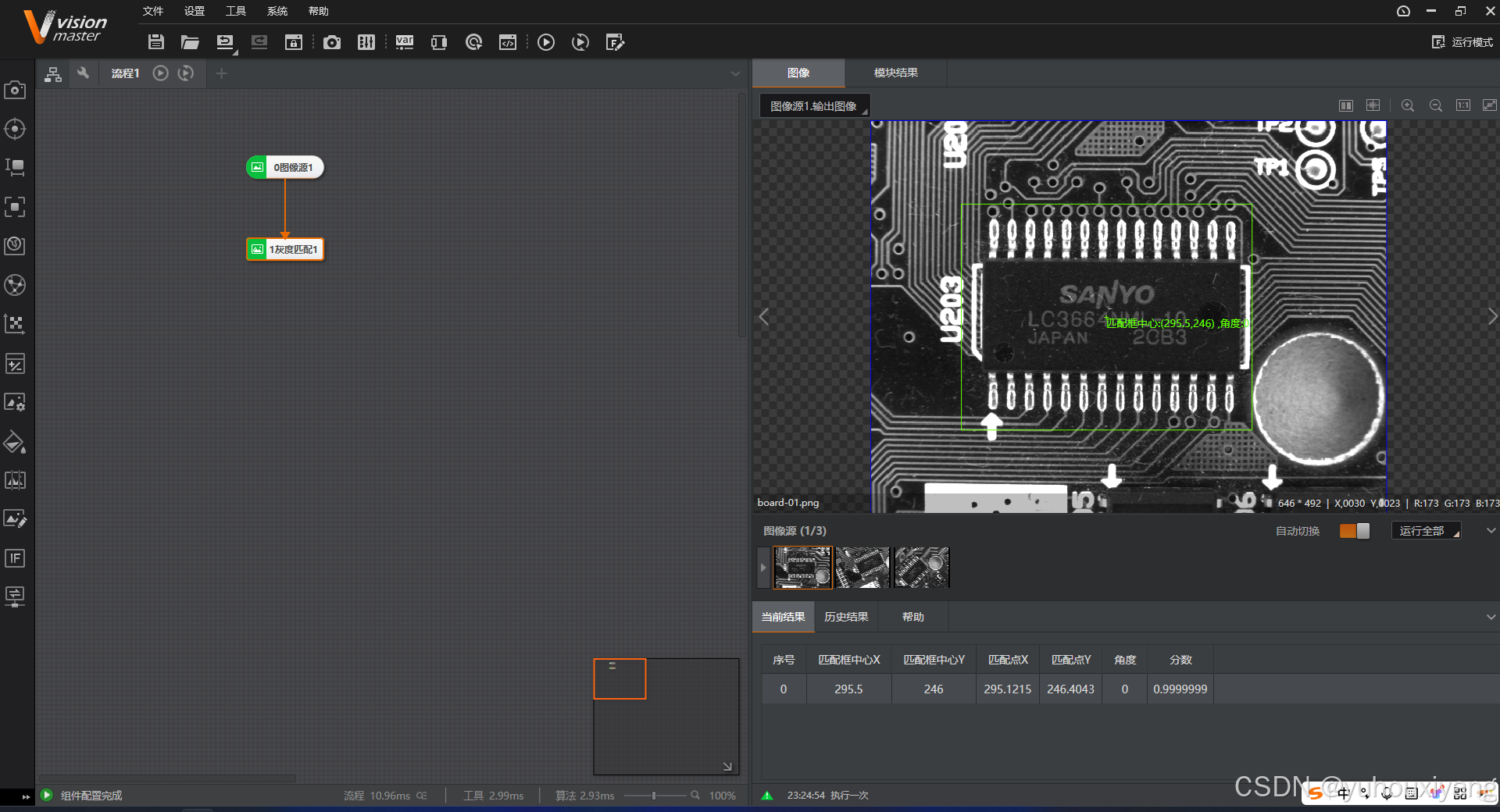
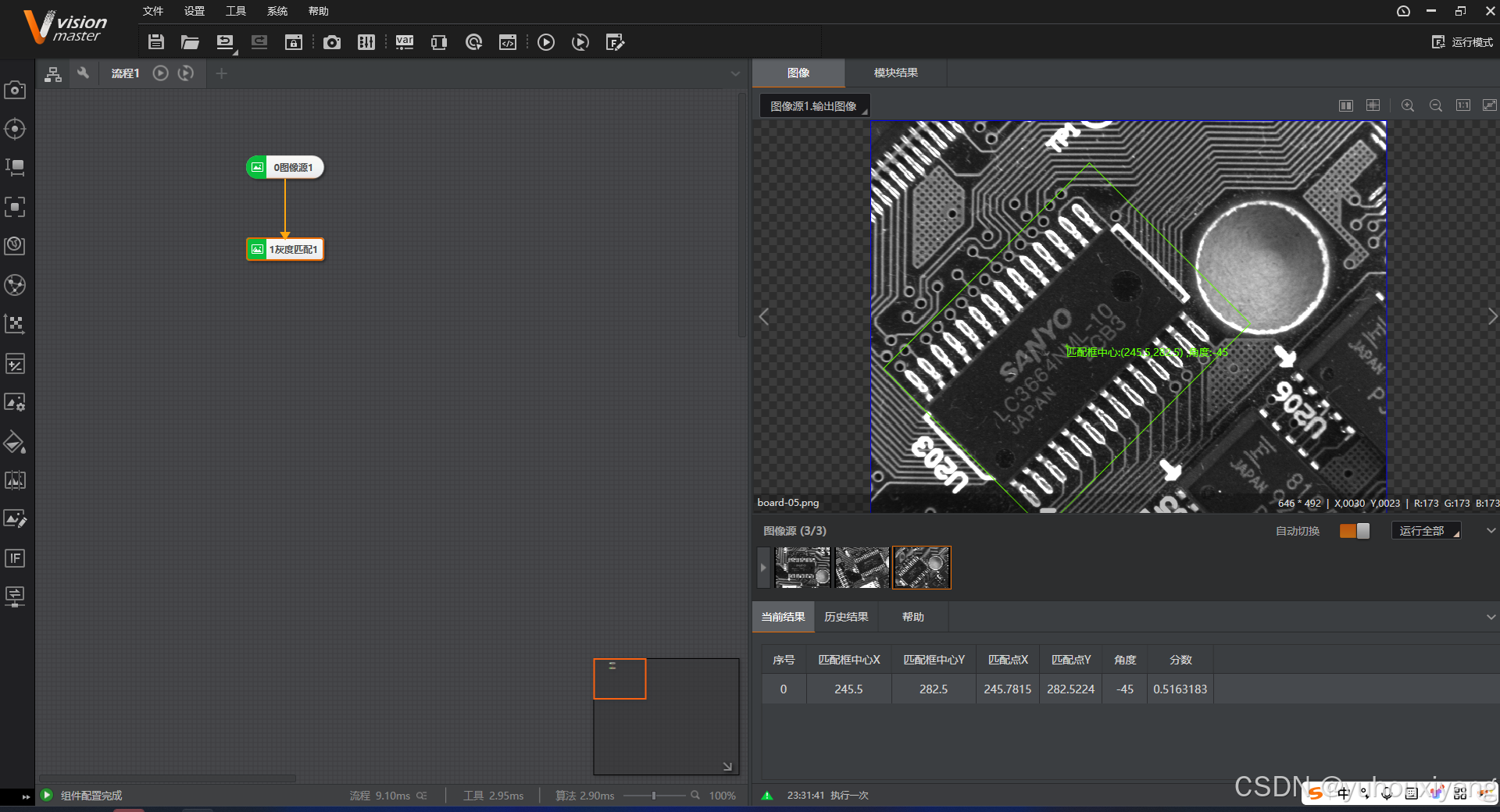
6:模版设定好,就可以验证了,点击运行按钮


















 4127
4127

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











