







一:有感
坚持就是力量,每天进步一点点,若干天后就会有大的突破
二:开始学习
今天学习VisionMaster中的图形定位:模块可判断图像指定区域内是否存在指定图形(回字形和十字形),并输出指定图形的中心点、角度、尺度等信息。该模块常用于目标物体的粗定位,也可用于产品计数、判断有无等其他基于定位的业务场景。
三:开始
1:先导入需要测试的图片集合,这部分不说了
2:使用图形定位,把两个组件的线连起来,然后双击图形定位图标进入设定菜单
3:然后和之前一样需要创建模版:图形定位也是基于轮廓点的算法,但是创建模版时候ROI框是固定形状的,是十字形,我想着这个功能应该是针对MARK点十字定位算法专用的

4:使用ROI工具将需要定位的模版框进去:但是研究工具发现只有一个十字形,中间是镂空的,相当于专门找十字mark点,我找了一个相似的图形,按照下图所示,将ROI放置于十字形中间

5:下面开始设定参数(参考了VisionMaster官方手册):
(1)定位方式:基础其实就是我们前面学习到的两种匹配方式
可选自动和手动两种模式,默认为自动。如果自动模式能满足需求则无需调节;如果不能满足要求,可切换为手动模式并调整特征尺度
设置特征匹配速度。该值越大表示图像金字塔顶层的图像越小,相应提取的边缘点就越稀疏,进而加快特征匹配速度。取值范围为1~20。
仅在定位方式设置为高精度匹配时可配置,表示提取边缘点的精细程度。取值需小于或等于速度尺度,且仅可为整数。取值为1时提取边缘点数量最多,精度最高 。
设置对比度调整模式,可选自动或手动,默认为自动。如果自动模式能满足需求则无需手动调整对比度;如果不能满足,可切换至手动模式并调整对比度阈值。
此处“对比度”指特征点和背景的灰度值差距。对比度阈值越大,被淘汰的特征点越多。取值范围为1~255。
(7)旋转角度
掩膜与待检测图片之间的角度阈值。实际检测中,两者之间的角度超过该阈值时无法匹配。建模时若没有成功匹配到结果建议增大该参数取值。
取值范围为0.1~1,建议使用默认值0.5
取值范围为1~10,建模时若检测到的匹配点数量较少,建议增大该参数取值。
设置掩膜的的细分类型。如果上文步骤中掩膜类型选择为十字形Mark点,此处可设置为实心十字或空心十字。
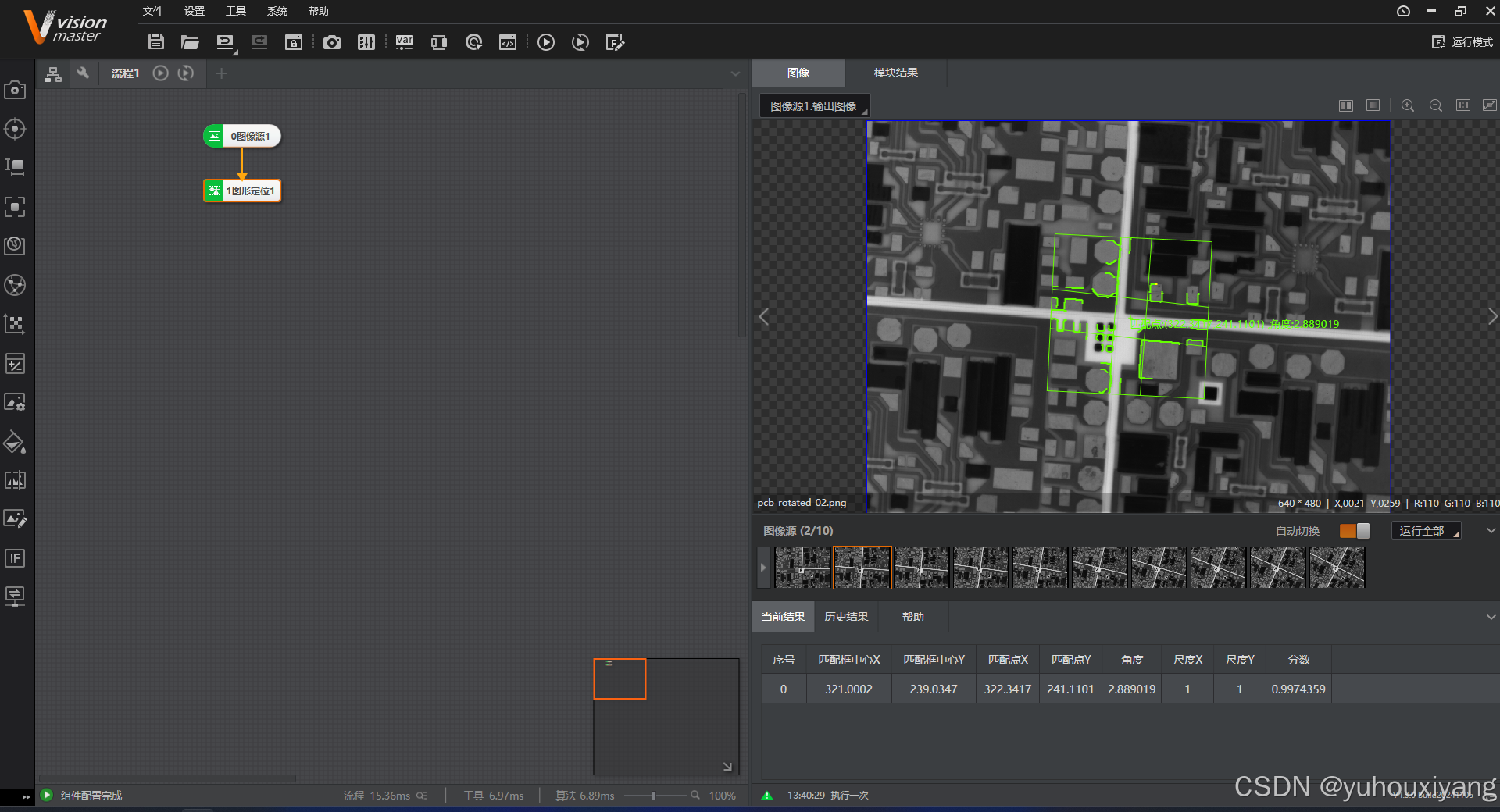
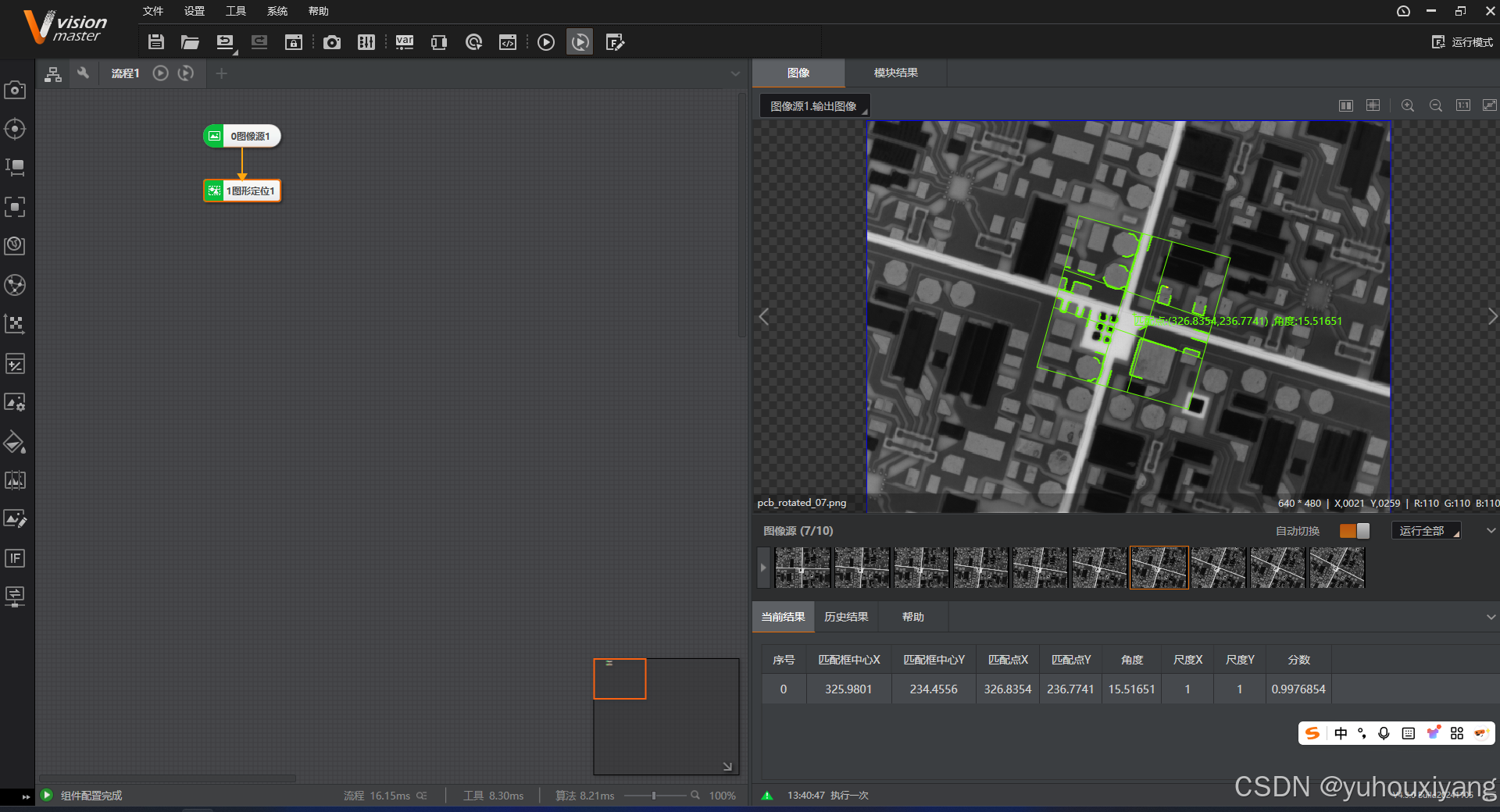
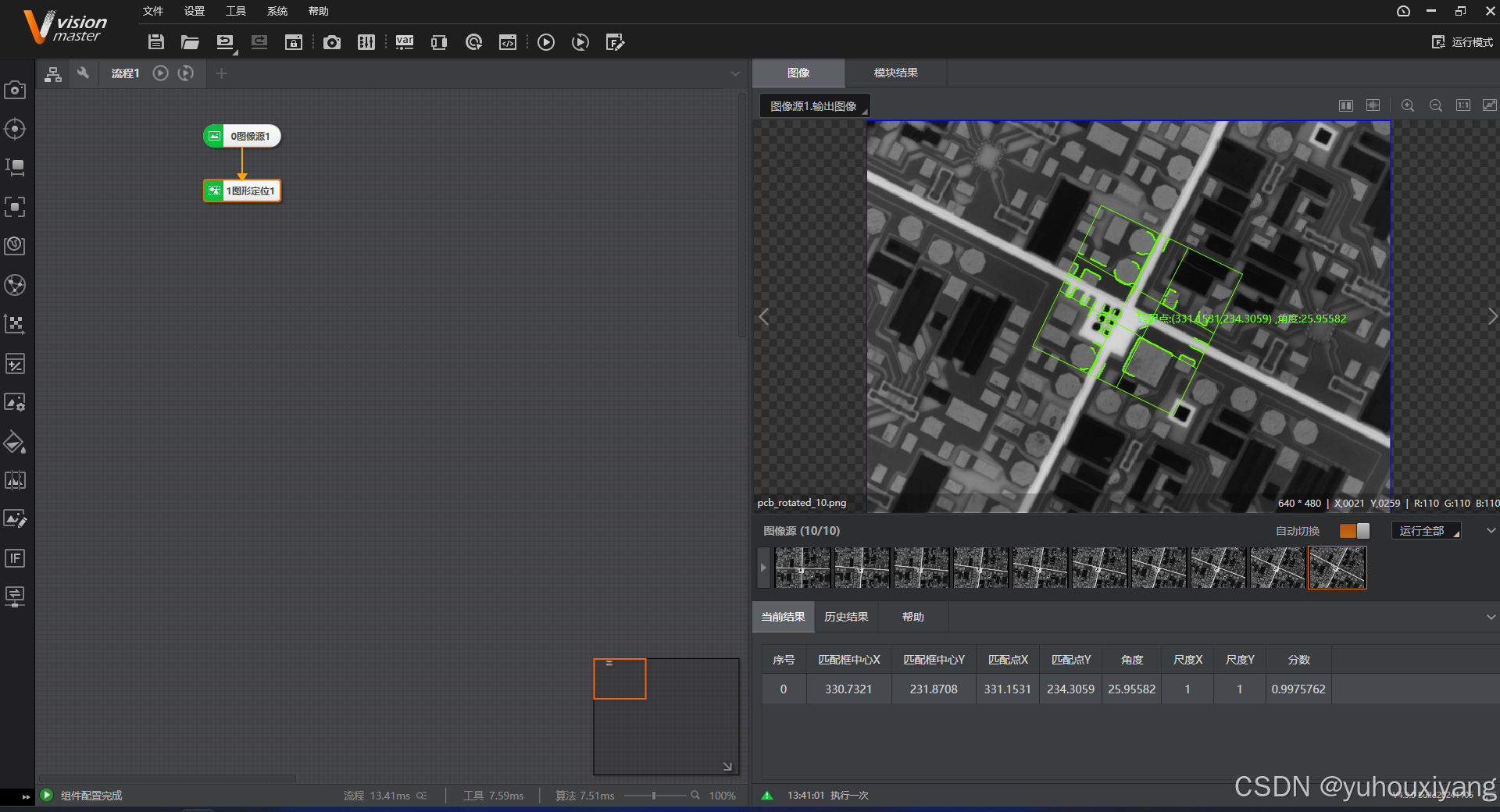
6:模版设定好,就可以验证了,点击运行按钮


















 988
988

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











