







DMNet:《Dynamic Multi-Scale Filters for Semantic Segmentation》
发布于2019ICCV。
有意思的是,DMNet的作者和APCNet的作者是同一个人,而且,DMNet和APCNet的结构十分相似,也就是这个作者,同一年做了两个方案,分别发在了ICCV和CVPR。
先前写过的APCNet的文章地址:语义分割系列12-APCNet(pytorch实现)。
引文
DMNet论文想要解决的是困扰已久的多尺度分割问题(Multi-scale)。
在先前的工作中:
- DeepLab系列,用的是空洞卷积(dilated conv、atrous conv)来扩大感受野以捕获多尺度信息,但是,这种卷积操作引入了大量的计算量,而且容易引起局部邻域的信息丢失。同时,空洞卷积有一个比较致命的问题,就是这个扩张数率的选择,选择过大的速率,小物体就会丢失信息,导致一些网格效应、边界效应。
- Inception,用的是多个不同大小的卷积核并行,来处理多尺度问题,同样引入了相当一部分的计算量,而且,参数多了就容易导致过拟合。
- PSPNet提出的池化金字塔(PPM)是一个比较有效的方法,也是APCNet和本文模型的思想主要来源,毕竟APCNet和DMNet都有PPM的影子。PPM通过不同大小的池化来捕获多尺度的上下文信息。不过这种捕获信息的方式也会损失一定的信息(当然这是废话的,对特征图进行池化操作必然损失信息)。
作者说了这么多别人不好,然后就开始引入自己怎么怎么好↓
本文亮点:
- 提出了端到端的DMNet模型,可以利用动态多尺度的过滤器对语义进行细分,相对于之前模型参数固定的方法,DMNet可以对图像的内容进行自适应的变化。
- 提出了动态卷积模块,来捕获多尺度语义信息,每一个DCM模块都可以处理与输入尺寸相关的比例变化。
模型
(吐槽:与 APCNet一模一样的架构图)
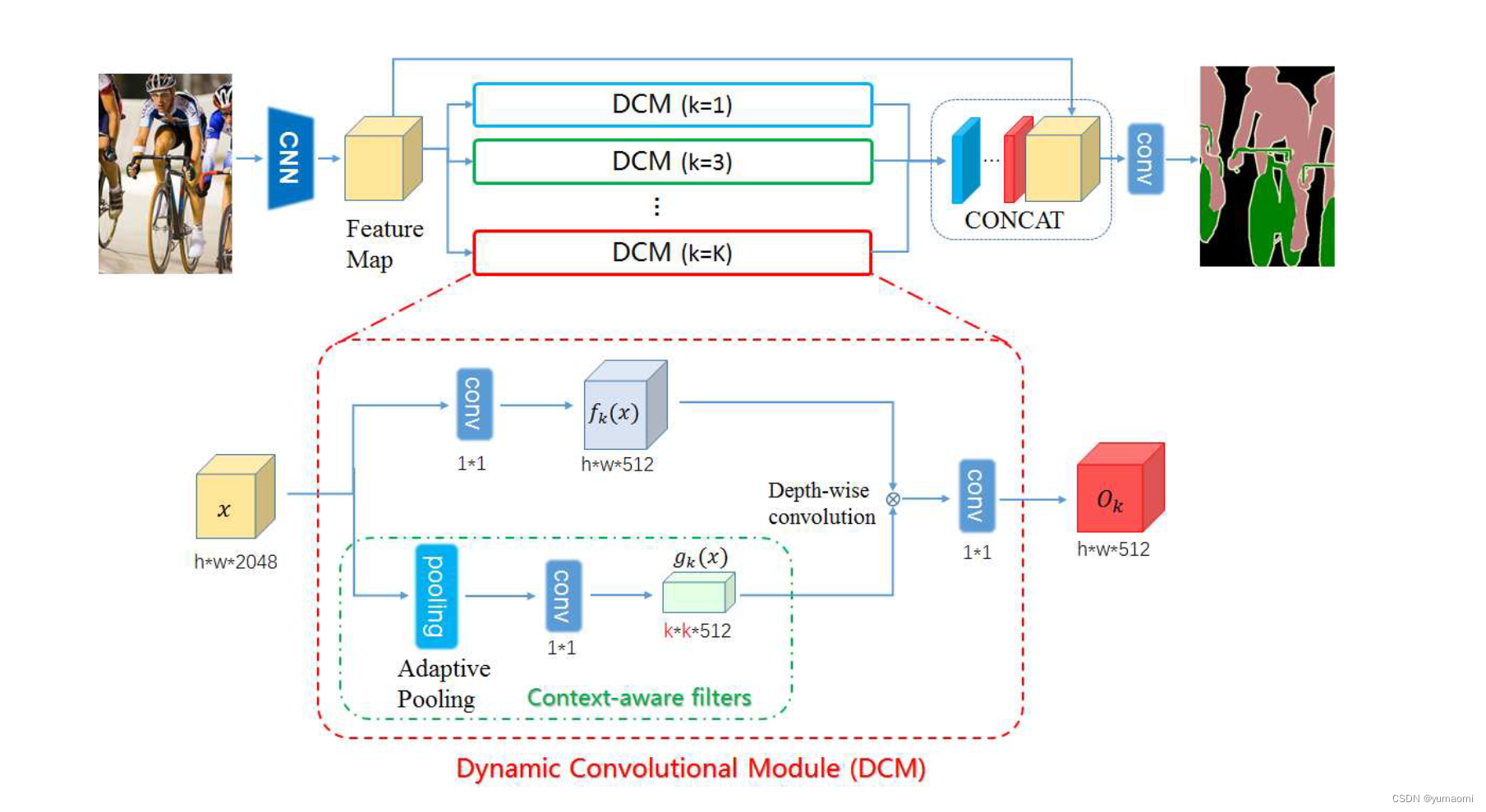
和PSPNet、APCNet的架构一样,只是设计了几个拥有不同k值的DCM模块。
DCM模块
所以,这篇文章的重点内容在于DCM模块的设计。
文章中写了这么一句话:
The goal of DCM is to capture a specific scale representation for the input image adaptively.
DCM模块的目标是自适应捕获输入图像的特定比例表示。
DCM模块内容如下,主要的亮点在于绿色框内的Context-aware filters。

作者称这个结构为上下文感知过滤器(Context-aware filters)。在这些filters中嵌入了丰富的内容和高级语义信息而且这些filters能够适应输入的图像,捕获图像内部的不同尺寸信息。
DCM结构比较简单,输入的特征图x实现需要经过一个卷积层来减少通道数。x经过一个AdaptiveAvgPooling(k),k值是自定义的一个量。经过卷积后生成k×k×512大小的gk(x),最后用一个Depth-wise conv将上下两个分支的特征图融合。就得到了一个DCM模块的输出。最后像APCNet一样,把所有特征融合起来就算完成了这个网络的全部内容。
复现
backbone-ResNet50
import torch
import torch.nn as nn
class BasicBlock(nn.Module):
expansion: int = 4
def __init__(self, inplanes, planes, stride = 1, downsample = None, groups = 1,
base_width = 64, dilation = 1, norm_layer = None):
super(BasicBlock, self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
if groups != 1 or base_width != 64:
raise ValueError("BasicBlock only supports groups=1 and base_width=64")
if dilation > 1:
raise NotImplementedError("Dilation > 1 not supported in BasicBlock")
# Both self.conv1 and self.downsample layers downsample the input when stride != 1
self.conv1 = nn.Conv2d(inplanes, planes ,kernel_size=3, stride=stride,
padding=dilation,groups=groups, bias=False,dilation=dilation)
self.bn1 = norm_layer(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = nn.Conv2d(planes, planes ,kernel_size=3, stride=stride,
padding=dilation,groups=groups, bias=False,dilation=dilation)
self.bn2 = norm_layer(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample= None,
groups = 1, base_width = 64, dilation = 1, norm_layer = None,):
super(Bottleneck, self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
width = int(planes * (base_width / 64.0)) * groups
# Both self.conv2 and self.downsample layers downsample the input when stride != 1
self.conv1 = nn.Conv2d(inplanes, width, kernel_size=1, stride=1, bias=False)
self.bn1 = norm_layer(width)
self.conv2 = nn.Conv2d(width, width, kernel_size=3, stride=stride, bias=False, padding=dilation, dilation=dilation)
self.bn2 = norm_layer(width)
self.conv3 = nn.Conv2d(width, planes * self.expansion, kernel_size=1, stride=1, bias=False)
self.bn3 = norm_layer(planes * self.expansion)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
class ResNet(nn.Module):
def __init__(
self,block, layers,num_classes = 1000, zero_init_residual = False, groups = 1,
width_per_group = 64, replace_stride_with_dilation = None, norm_layer = None):
super(ResNet, self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
self._norm_layer = norm_layer
self.inplanes = 64
self.dilation = 2
if replace_stride_with_dilation is None:
# each element in the tuple indicates if we should replace
# the 2x2 stride with a dilated convolution instead
replace_stride_with_dilation = [False, False, False]
if len(replace_stride_with_dilation) != 3:
raise ValueError(
"replace_stride_with_dilation should be None "
f"or a 3-element tuple, got {replace_stride_with_dilation}"
)
self.groups = groups
self.base_width = width_per_group
self.conv1 = nn.Conv2d(3, self.inplanes, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = norm_layer(self.inplanes)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0])
self.layer2 = self._make_layer(block, 128, layers[1], stride=1, dilate=replace_stride_with_dilation[0])
self.layer3 = self._make_layer(block, 256, layers[2], stride=2, dilate=replace_stride_with_dilation[1])
self.layer4 = self._make_layer(block, 512, layers[3], stride=1, dilate=replace_stride_with_dilation[2])
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Linear(512 * block.expansion, num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode="fan_out", nonlinearity="relu")
elif isinstance(m, (nn.BatchNorm2d, nn.GroupNorm)):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
# Zero-initialize the last BN in each residual branch,
# so that the residual branch starts with zeros, and each residual block behaves like an identity.
# This improves the model by 0.2~0.3% according to https://arxiv.org/abs/1706.02677
if zero_init_residual:
for m in self.modules():
if isinstance(m, Bottleneck):
nn.init.constant_(m.bn3.weight, 0) # type: ignore[arg-type]
elif isinstance(m, BasicBlock):
nn.init.constant_(m.bn2.weight, 0) # type: ignore[arg-type]
def _make_layer(
self,
block,
planes,
blocks,
stride = 1,
dilate = False,
):
norm_layer = self._norm_layer
downsample = None
previous_dilation = self.dilation
if dilate:
self.dilation *= stride
stride = stride
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes * block.expansion, kernel_size=1, stride=stride, bias=False),
norm_layer(planes * block.expansion))
layers = []
layers.append(
block(
self.inplanes, planes, stride, downsample, self.groups, self.base_width, previous_dilation, norm_layer
)
)
self.inplanes = planes * block.expansion
for _ in range(1, blocks):
layers.append(
block(
self.inplanes,
planes,
groups=self.groups,
base_width=self.base_width,
dilation=self.dilation,
norm_layer=norm_layer,
)
)
return nn.Sequential(*layers)
def _forward_impl(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
return x
def forward(self, x) :
return self._forward_impl(x)
def _resnet(block, layers, pretrained_path = None, **kwargs,):
model = ResNet(block, layers, **kwargs)
if pretrained_path is not None:
model.load_state_dict(torch.load(pretrained_path), strict=False)
return model
def resnet50(pretrained_path=None, **kwargs):
return ResNet._resnet(Bottleneck, [3, 4, 6, 3],pretrained_path,**kwargs)
def resnet101(pretrained_path=None, **kwargs):
return ResNet._resnet(Bottleneck, [3, 4, 23, 3],pretrained_path,**kwargs)DMNet
import torch
import torch.nn as nn
import torch.nn.functional as F
from torchvision.transforms import Resize
class DCMModle(nn.Module):
def __init__(self, in_channels=2048, channels=512, filter_size=1, fusion=True):
super(DCMModle, self).__init__()
self.filter_size = filter_size
self.in_channels = in_channels
self.channels = channels
self.fusion = fusion
# Global Information vector
self.reduce_Conv = nn.Conv2d(self.in_channels, self.channels, 1)
self.filter = nn.AdaptiveAvgPool2d(self.filter_size)
self.filter_gen_conv = nn.Conv2d(self.in_channels, self.channels, 1, 1,
0)
self.residual_conv = nn.Conv2d(self.channels, self.channels, 1)
self.global_info = nn.Conv2d(self.channels, self.channels, 1)
self.gla = nn.Conv2d(self.channels, self.filter_size**2, 1, 1, 0)
self.activate = nn.Sequential(nn.BatchNorm2d(self.channels),
nn.ReLU()
)
if self.fusion:
self.fusion_conv = nn.Conv2d(self.channels, self.channels, 1)
def forward(self, x):
b, c, h, w = x.shape
generted_filter = self.filter_gen_conv(self.filter(x)).view(b, self.channels, self.filter_size, self.filter_size)
x = self.reduce_Conv(x)
c = self.channels
# [1, b * c, h, w], c = self.channels
x = x.view(1, b * c, h, w)
# [b * c, 1, filter_size, filter_size]
generted_filter = generted_filter.view(b * c, 1, self.filter_size,
self.filter_size)
pad = (self.filter_size - 1) // 2
if (self.filter_size - 1) % 2 == 0:
p2d = (pad, pad, pad, pad)
else:
p2d = (pad + 1, pad, pad + 1, pad)
x = F.pad(input=x, pad=p2d, mode='constant', value=0)
# [1, b * c, h, w]
output = nn.functional.conv2d(input=x, weight=generted_filter, groups=b * c)
# [b, c, h, w]
output = output.view(b, c, h, w)
output = self.activate(output)
if self.fusion:
output = self.fusion_conv(output)
return output
class DCMModuleList(nn.ModuleList):
def __init__(self, filter_sizes = [1,2,3,6], in_channels = 2048, channels = 512):
super(DCMModuleList, self).__init__()
self.filter_sizes = filter_sizes
self.in_channels = in_channels
self.channels = channels
for filter_size in self.filter_sizes:
self.append(
DCMModle(in_channels, channels, filter_size)
)
def forward(self, x):
out = []
for DCM in self:
DCM_out = DCM(x)
out.append(DCM_out)
return out
class DMNet(nn.Module):
def __init__(self, num_classes):
super(DMNet, self).__init__()
self.num_classes = num_classes
self.backbone = ResNet.resnet50(replace_stride_with_dilation=[1,2,4])
self.in_channels = 2048
self.channels = 512
self.DMNet_pyramid = DCMModuleList(filter_sizes=[1,2,3,6], in_channels=self.in_channels, channels=self.channels)
self.conv1 = nn.Sequential(
nn.Conv2d(4*self.channels + self.in_channels, self.channels, 3, padding=1),
nn.BatchNorm2d(self.channels),
nn.ReLU()
)
self.cls_conv = nn.Conv2d(self.channels, self.num_classes, 3, padding=1)
def forward(self, x):
x = self.backbone(x)
DM_out = self.DMNet_pyramid(x)
DM_out.append(x)
x = torch.cat(DM_out, dim=1)
x = self.conv1(x)
x = Resize((8*x.shape[-2], 8*x.shape[-1]))(x)
x = self.cls_conv(x)
return x
数据集-Camvid
# 导入库
import os
os.environ['CUDA_VISIBLE_DEVICES'] = '0'
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
from torch import optim
from torch.utils.data import Dataset, DataLoader, random_split
from tqdm import tqdm
import warnings
warnings.filterwarnings("ignore")
import os.path as osp
import matplotlib.pyplot as plt
from PIL import Image
import numpy as np
import albumentations as A
from albumentations.pytorch.transforms import ToTensorV2
torch.manual_seed(17)
# 自定义数据集CamVidDataset
class CamVidDataset(torch.utils.data.Dataset):
"""CamVid Dataset. Read images, apply augmentation and preprocessing transformations.
Args:
images_dir (str): path to images folder
masks_dir (str): path to segmentation masks folder
class_values (list): values of classes to extract from segmentation mask
augmentation (albumentations.Compose): data transfromation pipeline
(e.g. flip, scale, etc.)
preprocessing (albumentations.Compose): data preprocessing
(e.g. noralization, shape manipulation, etc.)
"""
def __init__(self, images_dir, masks_dir):
self.transform = A.Compose([
A.Resize(224, 224),
A.HorizontalFlip(),
A.VerticalFlip(),
A.Normalize(),
ToTensorV2(),
])
self.ids = os.listdir(images_dir)
self.images_fps = [os.path.join(images_dir, image_id) for image_id in self.ids]
self.masks_fps = [os.path.join(masks_dir, image_id) for image_id in self.ids]
def __getitem__(self, i):
# read data
image = np.array(Image.open(self.images_fps[i]).convert('RGB'))
mask = np.array( Image.open(self.masks_fps[i]).convert('RGB'))
image = self.transform(image=image,mask=mask)
return image['image'], image['mask'][:,:,0]
def __len__(self):
return len(self.ids)
# 设置数据集路径
DATA_DIR = r'dataset\camvid' # 根据自己的路径来设置
x_train_dir = os.path.join(DATA_DIR, 'train_images')
y_train_dir = os.path.join(DATA_DIR, 'train_labels')
x_valid_dir = os.path.join(DATA_DIR, 'valid_images')
y_valid_dir = os.path.join(DATA_DIR, 'valid_labels')
train_dataset = CamVidDataset(
x_train_dir,
y_train_dir,
)
val_dataset = CamVidDataset(
x_valid_dir,
y_valid_dir,
)
train_loader = DataLoader(train_dataset, batch_size=24, shuffle=True,drop_last=True)
val_loader = DataLoader(val_dataset, batch_size=24, shuffle=True,drop_last=True)训练
model = DMNet(num_classes=33).cuda()
#model.load_state_dict(torch.load(r"checkpoints/resnet101-5d3b4d8f.pth"), strict=False)from d2l import torch as d2l
from tqdm import tqdm
import pandas as pd
#损失函数选用多分类交叉熵损失函数
lossf = nn.CrossEntropyLoss(ignore_index=255)
#选用adam优化器来训练
optimizer = optim.SGD(model.parameters(), lr=0.1)
scheduler = torch.optim.lr_scheduler.StepLR(optimizer, step_size=50, gamma=0.5, last_epoch=-1)
#训练50轮
epochs_num = 100
def train_ch13(net, train_iter, test_iter, loss, trainer, num_epochs,scheduler,
devices=d2l.try_all_gpus()):
timer, num_batches = d2l.Timer(), len(train_iter)
animator = d2l.Animator(xlabel='epoch', xlim=[1, num_epochs], ylim=[0, 1],
legend=['train loss', 'train acc', 'test acc'])
net = nn.DataParallel(net, device_ids=devices).to(devices[0])
loss_list = []
train_acc_list = []
test_acc_list = []
epochs_list = []
time_list = []
for epoch in range(num_epochs):
# Sum of training loss, sum of training accuracy, no. of examples,
# no. of predictions
metric = d2l.Accumulator(4)
for i, (features, labels) in enumerate(train_iter):
timer.start()
l, acc = d2l.train_batch_ch13(
net, features, labels.long(), loss, trainer, devices)
metric.add(l, acc, labels.shape[0], labels.numel())
timer.stop()
if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1:
animator.add(epoch + (i + 1) / num_batches,
(metric[0] / metric[2], metric[1] / metric[3],
None))
test_acc = d2l.evaluate_accuracy_gpu(net, test_iter)
animator.add(epoch + 1, (None, None, test_acc))
scheduler.step()
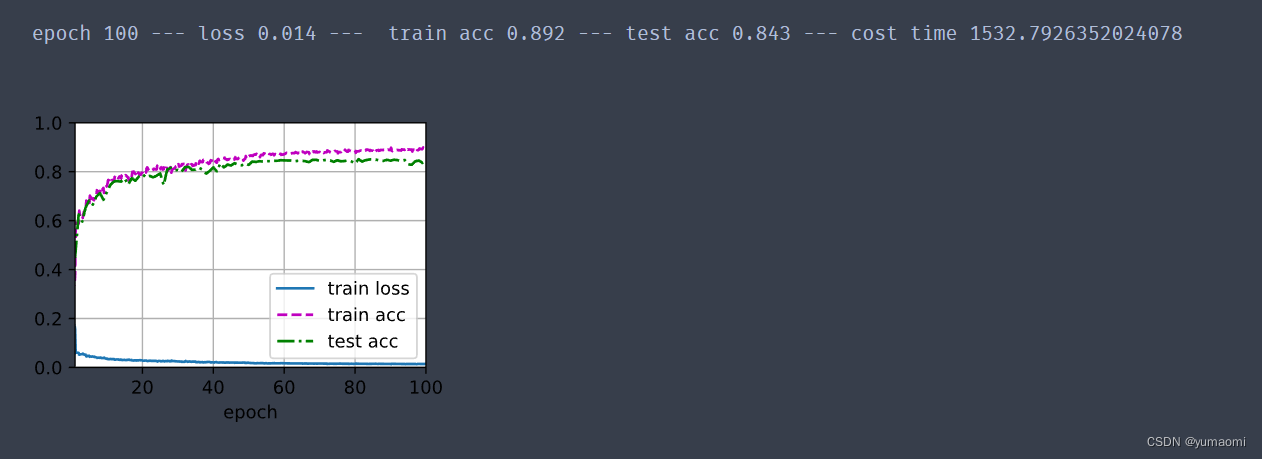
print(f"epoch {epoch+1} --- loss {metric[0] / metric[2]:.3f} --- train acc {metric[1] / metric[3]:.3f} --- test acc {test_acc:.3f} --- cost time {timer.sum()}")
#---------保存训练数据---------------
df = pd.DataFrame()
loss_list.append(metric[0] / metric[2])
train_acc_list.append(metric[1] / metric[3])
test_acc_list.append(test_acc)
epochs_list.append(epoch+1)
time_list.append(timer.sum())
df['epoch'] = epochs_list
df['loss'] = loss_list
df['train_acc'] = train_acc_list
df['test_acc'] = test_acc_list
df['time'] = time_list
df.to_excel("savefile/DMNet_camvid.xlsx")
#----------------保存模型-------------------
if np.mod(epoch+1, 5) == 0:
torch.save(model.state_dict(), f'checkpoints/DMNet_{epoch+1}.pth')
train_ch13(model, train_loader, val_loader, lossf, optimizer, epochs_num,scheduler)训练结果
















 7725
7725











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











