






-
rust 安装,略过
-
输入
choco install llvm opencvvcpkg打开powershell,输入
vcpkg install opencv4[contrib,nonfree]llvm vcpkg我这里没装也可以build通过
-
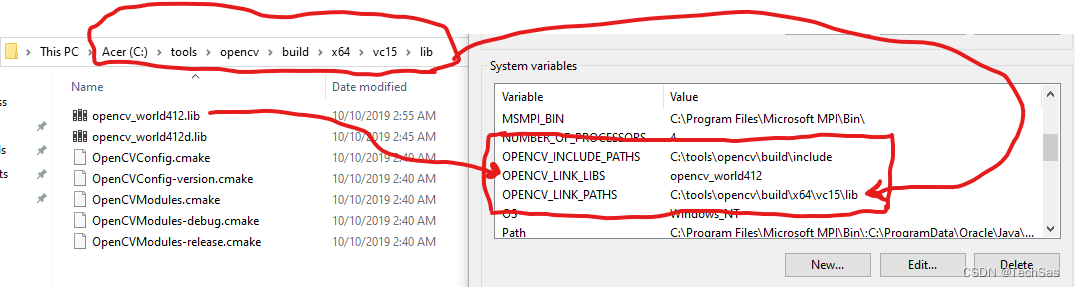
设置环境变量
-
main.rs 输入realsense提供的opencv代码:
//! This example opens and streams from a sensor, copys the frame data to an OpenCV //! Mat and shows the frame's contents in an OpenCV Window use anyhow::{ensure, Result}; use opencv::{core, highgui, imgproc, prelude::*}; use realsense_rust::{ config::Config, context::Context, frame::PixelKind, frame::{ColorFrame, DepthFrame}, kind::{Rs2CameraInfo, Rs2Format, Rs2StreamKind}, pipeline::InactivePipeline, }; use std::{collections::HashSet, convert::TryFrom, time::Duration}; /// Converts a RealSense ColorFrame with BGR8 color to an /// OpenCV mat also with BGR8 color fn mat_from_color(color_frame: &ColorFrame) -> core::Mat { let mut color_mat = unsafe { Mat::new_rows_cols( color_frame.height() as i32, color_frame.width() as i32, core::CV_8UC3, ) .unwrap() }; for (i, rs) in color_frame.iter().enumerate() { match rs { PixelKind::Bgr8 { b, g, r } => { *color_mat.at_mut::<opencv::core::Vec3b>(i as i32).unwrap() = [*b, *g, *r].into(); } _ => panic!("We got our types wrong!"), } } color_mat } /// Converts a RealSense DepthFrame with 16-bit depth to a /// floating point OpenCV mat with depth in meters. fn mat_from_depth16(depth_frame: &DepthFrame) -> core::Mat { let mut depth_mat = unsafe { Mat::new_rows_cols( depth_frame.height() as i32, depth_frame.width() as i32, core::CV_32F, ) .unwrap() }; let depth_unit = depth_frame.depth_units().unwrap(); for (i, rs) in depth_frame.iter().enumerate() { match rs { PixelKind::Z16 { depth } => { let depthf = *depth as f32 * depth_unit; *depth_mat.at_mut::<f32>(i as i32).unwrap() = depthf; } _ => panic!("We got our types wrong!"), } } depth_mat } /// Colorizes a single channel OpenCV mat. The mat's current /// range will be mapped to a [0..255] range and then a color map /// is applied. fn colorized_mat(mat: &core::Mat) -> core::Mat { let mut normalized = Mat::default(); core::normalize( &mat, &mut normalized, 0.0, 255.0, core::NORM_MINMAX, core::CV_8UC1, &core::no_array(), ) .unwrap(); let mut colorized = Mat::default(); imgproc::apply_color_map(&normalized, &mut colorized, imgproc::COLORMAP_JET).unwrap(); colorized } pub fn main() -> Result<()> { // Check for depth or color-compatible devices. let queried_devices = HashSet::new(); // Query any devices let context = Context::new()?; let devices = context.query_devices(queried_devices); ensure!(!devices.is_empty(), "No devices found"); // create pipeline let pipeline = InactivePipeline::try_from(&context)?; let mut config = Config::new(); config .enable_device_from_serial(devices[0].info(Rs2CameraInfo::SerialNumber).unwrap())? .disable_all_streams()? .enable_stream(Rs2StreamKind::Color, None, 640, 0, Rs2Format::Bgr8, 30)? .enable_stream(Rs2StreamKind::Depth, None, 0, 240, Rs2Format::Z16, 30) .unwrap(); // Change pipeline's type from InactivePipeline -> ActivePipeline let mut pipeline = pipeline.start(Some(config))?; let color_window = "color"; highgui::named_window(color_window, highgui::WINDOW_AUTOSIZE)?; let depth_window = "depth"; highgui::named_window(depth_window, highgui::WINDOW_AUTOSIZE)?; println!("Press any key to quit."); // process frames let timeout = Duration::from_millis(2000); loop { let frames = pipeline.wait(Some(timeout)).unwrap(); let color_frames = frames.frames_of_type::<ColorFrame>(); let depth_frames = frames.frames_of_type::<DepthFrame>(); if !color_frames.is_empty() { let color_frame = &color_frames[0]; let color_mat = mat_from_color(color_frame); highgui::imshow(color_window, &color_mat).unwrap(); if highgui::wait_key(2)? != -1 { break; } } if !depth_frames.is_empty() { let depth_frame = &depth_frames[0]; let depth_mat = mat_from_depth16(depth_frame); let colorized_depth = colorized_mat(&depth_mat); highgui::imshow(depth_window, &colorized_depth).unwrap(); // Show the depth value of the middle of the image in the window's title bar let center = depth_mat .at_2d::<f32>(depth_mat.rows() / 2, depth_mat.cols() / 2) .unwrap(); let center_str: String = format!("CenterDepth: {} (m)", center); highgui::set_window_title(depth_window, ¢er_str).unwrap(); if highgui::wait_key(2)? != -1 { break; } } } Ok(()) } ``` -
进入rust,终端输入
cargo add opencv $Env:PKG_CONFIG_PATH="F:\project\realsense-rust\realsense-sys" cargo build cargo run
完结,如果报错error: building atlmfc:x64-windows failed with: BUILD_FAILED,请检查vs installer是否安装了atl和mfc,安装后仍然报错,请重启电脑,回来直接build,run查看结果。















06-20
 2204
2204
2204
06-28
10-17
2002
2002
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









