









转载http://www.cnblogs.com/jerrylead/archive/2011/05/13/2045309.html
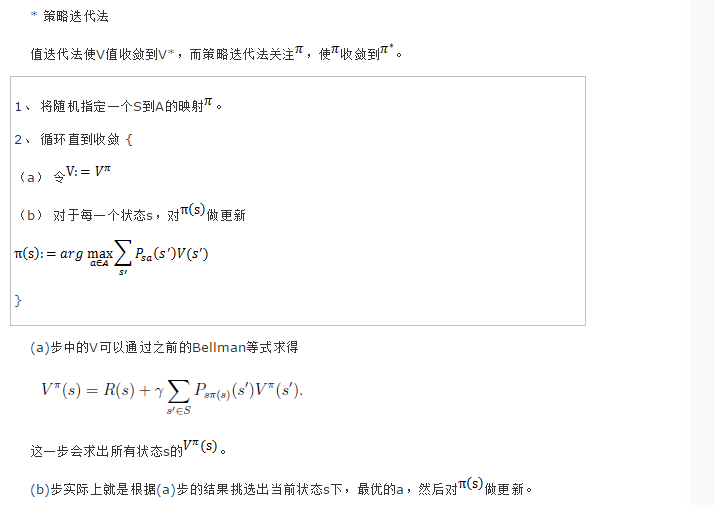
在之前的讨论中,我们总是给定一个样本x,然后给或者不给label y。之后对样本进行拟合、分类、聚类或者降维等操作。然而对于很多序列决策或者控制问题,很难有这么规则的样本。比如,四足机器人的控制问题,刚开始都不知道应该让其动那条腿,在移动过程中,也不知道怎么让机器人自动找到合适的前进方向。
另外如要设计一个下象棋的AI,每走一步实际上也是一个决策过程,虽然对于简单的棋有A*的启发式方法,但在局势复杂时,仍然要让机器向后面多考虑几步后才能决定走哪一步比较好,因此需要更好的决策方法。
对于这种控制决策问题,有这么一种解决思路。我们设计一个回报函数(reward function),如果learning agent(如上面的四足机器人、象棋AI程序)在决定一步后,获得了较好的结果,那么我们给agent一些回报(比如回报函数结果为正),得到较差的结果,那么回报函数为负。比如,四足机器人,如果他向前走了一步(接近目标),那么回报函数为正,后退为负。如果我们能够对每一步进行评价,得到相应的回报函数,那么就好办了,我们只需要找到一条回报值最大的路径(每步的回报之和最大),就认为是最佳的路径。
增强学习在很多领域已经获得成功应用,比如自动直升机,机器人控制,手机网络路由,市场决策,工业控制,高效网页索引等。
接下来,先介绍一下马尔科夫决策过程(MDP,Markov decision processes)。
马尔科夫决策过程
一个马尔科夫决策过程由一个五元组构成 (S,A,Psa,γ,R)
S表示状态集(states)。(比如,在自动直升机系统中,直升机当前位置坐标组成状态集)
A表示一组动作(actions)。(比如,使用控制杆操纵的直升机飞行方向,让其向前,向后等)
- Psa 是状态转移概率。S中的一个状态到另一个状态的转变。 Psa 表示的是在当前 s∈S 态下,经过 a∈A 作用后,会转移到的其他状态的概率分布情况(当前状态执行a后可能跳转到很多状态)。
- γ∈[0,1) 是阻尼系数(discount factor)
- R:S×A→R R是回报函数(reward function),回报函数经常写作S的函数(只与S有关),这样的话,R重新写作 R:S→R

MDP的动态过程如下:某个agent的初始状态为
s0
,然后从A中挑选一个动作
a0
执行,执行后,agent按
Psa
率随机转移到了下一个
s1
状态,
s1∈Ps0a0
,然后再执行一个动作
a1
,就转移到了
s2
,接下来再执行
a2
…,我们可以用下面的图表示整个过程
我们按如下方式计算回报

下面我们将上式简化一些,只将它表示成状态 S 的函数(此处只是为了方便表示)

我们的目标是选择一组最佳的动作组合,使得上面的报值的期望最大:

从上式可以发现,回报值被打了折扣,越往后的状态对回报和影响越小。我们更看重前面的状态选择。
已经处于某个状态
一个状态 s’。我们将这个动作的选择过程称为策略( policy), 每一个 policy 其实就是一个状态到动作的映射函数
π∶S⟼A
。
给定
π
也就给定了
我们为了区分不同π的好坏, 并定义在当前状态下,执行某个策略π后,出现的结果的好坏, 需要定义值函数( value function) 也叫折算累积回报( discounted cumulative reward)

可以看到,在当前状态
到达每个状态都会有一定回报值,距离当前状态越近的其他状态对方案的影响越大,权重越高。这和下象棋差不多,在当前棋局
从递推的角度上考虑,当期状态
s
的值函数
V
,其实可以看作是当前状态的回报

再由Bellman等式,从上式得到

s′
表示下一个状态。
前面的R(s)称为立即回报(immediate reward),就是R(当前状态)。第二项也可以写作
可以想象,当状态个数有限时,我们可以通过上式来求出每一个s的
V
(终结状态没有第二项
当然,我们求V的目的就是想找到一个当前状态
s
下,最优的行动策略
就是从可选的策略
π
中挑选一个最优的策略(discounted rewards最大)。
上式的 Bellman 等式形式如下:

第一项与
π
无关,所以不变。第二项是一个
π
就决定了每个状态
s
的下一步动作
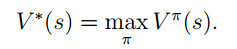
从上式可以看出欲要找到最优的
V∗
,等价于找到最优的
π
,我们再定义最优的策略
π∗:S⟼A
如下:
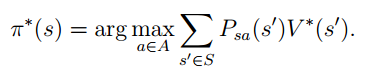
选择最优的
π∗
,也就确定了每个状态
s
的下一步最优动作
对于任意的状态
s
,和策略

解释一下就是当前状态的最优的值函数
V∗
,是由采用最优执行策略
π∗
的情况下得出的,采用最优执行方案的回报显然要比采用其他的执行策略
π
要好。
这里需要注意的是,如果我们能够求得每个
s
下最优的
值迭代和策略迭代法
上节我们给出了迭代公式和优化目标,这节讨论两种求解有限状态 MDP 具体策略的有效算法。这里,我们只针对 MDP 是有限状态、有限动作的情况, |S| < ∞, |A| < ∞。
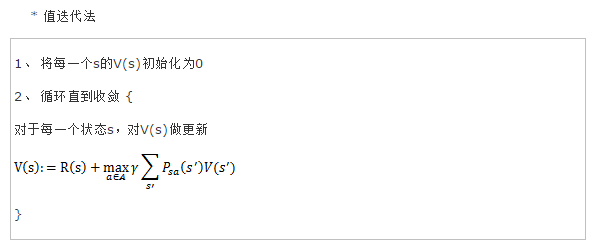
内循环的实现有两种策略:
1、 同步迭代法
拿初始化后的第一次迭代来说吧,初始状态所有的V(s)都为0。然后对所有的s都计算新的V(s)=R(s)+0=R(s)。在计算每一个状态时,得到新的V(s)后,先存下来,不立即更新。待所有的s的新值V(s)都计算完毕后,再统一更新。
这样,第一次迭代后,V(s)=R(s)。
2、 异步迭代法
与同步迭代对应的就是异步迭代了,对每一个状态s,得到新的V(s)后,不存储,直接更新。这样,第一次迭代后,大部分V(s)>R(s)。
不管使用这两种的哪一种,最终V(s)会收敛到 V∗(s) 。知道了 V∗ 后,我们再使用公式(3)来求出相应的最优策略 pi∗ ,当然 π∗ 可以在求 V∗ 的过程中求出。
对于值迭代和策略迭代很难说哪种方法好,哪种不好。对于规模比较小的MDP来说,策略一般能够更快地收敛。但是对于规模很大(状态很多)的MDP来说,值迭代比较容易(不用求线性方程组)。
###MDP中的参数估计
在之前讨论的 MDP 中,我们是已知状态转移概率
Psa
和回报函数 R(s)的。但在很多实际问题中,这些参数不能显式得到,我们需要从数据中估计出这些参数(通常 S、 A 和γ是已知的)。
假设我们已知很多条状态转移路径如下:
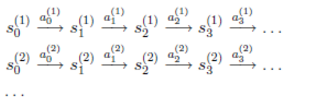
其中,
s(j)i
是
i
时刻,第
j
条转移路径对应的状态,
如果我们获得了很多上面类似的转移链(相当于有了样本),那么我们就可以使用最大似然估计来估计状态转移概率。

分子是从s状态执行动作a后到达s’的次数,分母是在状态s时,执行a的次数。两者相除就是在s状态下执行a后,会转移到s’的概率。
为了避免分母为0的情况,我们需要做平滑。如果分母为0,则令
Psa(s′)=1|s|
,也就是说当样本中没有出现过在s状态下执行a的样例时,我们认为转移概率均分。
上面这种估计方法是从历史数据中估计,这个公式同样适用于在线更新。比如我们新得到了一些转移路径,那么对上面的公式进行分子分母的修正(加上新得到的count)即可。修正过后,转移概率有所改变,按照改变后的概率,可能出现更多的新的转移路径,这样
Psa
会越来越准。
同样,如果回报函数未知,那么我们认为R(s)为在s状态下已经观测到的回报均值。
当转移概率和回报函数估计出之后,我们可以使用值迭代或者策略迭代来解决MDP问题。比如,我们将参数估计和值迭代结合起来(在不知道状态转移概率情况下)的流程如下:
在(b)步中我们要做值更新,也是一个循环迭代的过程,在上节中,我们通过将V初始化为0,然后进行迭代来求解V。嵌套到上面的过程后,如果每次初始化V为0,然后迭代更新,就会很慢。一个加快速度的方法是每次将V初始化为上一次大循环中得到的V。也就是说V的初值衔接了上次的结果。
* 总结*
首先我们这里讨论的MDP是非确定的马尔科夫决策过程,也就是回报函数和动作转换函数是有概率的。在状态s下,采取动作a后的转移到的下一状态s’也是有概率的。再次,在增强学习里有一个重要的概念是Q学习,本质是将与状态s有关的V(s)转换为与a有关的Q。强烈推荐Tom Mitchell的《机器学习》最后一章,里面介绍了Q学习和更多的内容。最后,里面提到了Bellman等式,在《算法导论》中有Bellman-Ford的动态规划算法,可以用来求解带负权重的图的最短路径,里面最值得探讨的是收敛性的证明,非常有价值。有学者仔细分析了增强学习和动态规划的关系。
这篇是ng讲义中最后一篇了,还差一篇learning theory,暂时不打算写了,感觉对learning的认识还不深。等到学习完图模型和在线学习等内容后,再回过头来写learning theory吧。另外,ng的讲义中还有一些数学基础方面的讲义比如概率论、线性代数、凸优化、高斯过程、HMM等,都值得看一下。















 9480
9480

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









