






近年来,随着深度学习的迅猛发展,计算机视觉领域取得了巨大的突破。其中,目标检测是计算机视觉中的一个重要任务,它在许多应用领域中起到了至关重要的作用。然而,目标检测所需的大量标注数据集的制作却是一项耗时且繁琐的工作。
为了解决这个问题,本文实现了一个基于YOLOv5的自动数据集标注功能脚本。YOLOv5是当今目标检测领域的一种优秀模型,其高效准确的检测能力被广泛认可。
我们的自动数据集标注工具通过使用已经训练好的YOLOv5模型,可以快速而准确地对输入的图像进行目标检测,将检测结果存储为标签文件(xml格式),生成标注数据集。这样,用户无需手动进行标注,大大提高了数据集标注的效率和准确性,为研究者和开发者节省宝贵的时间和精力。
说明:该工具还是一个基线版本,后续会根据用户反馈不定时更新
该工具是在之前yolov5剪枝与知识蒸馏项目的基础上更新的脚本功能,所以直接clone该项目即可,或者将我的代码复制到你自己代码中。
使用说明
先下载完整项目代码
1.git clone https://github.com/YINYIPENG-EN/Knowledge_distillation_Pruning_Yolov5.git
2.cd tools
3.python auto_label.py --weights [权重路径] --source [需要标注的数据集路径]
运行脚本后会自动对数据集进行目标检测,标注后的xml标签文件和检测效果图会自动保存在项目下的runs/ Datasets/DetectImages中。检测结果和标注结果如下图:
 | 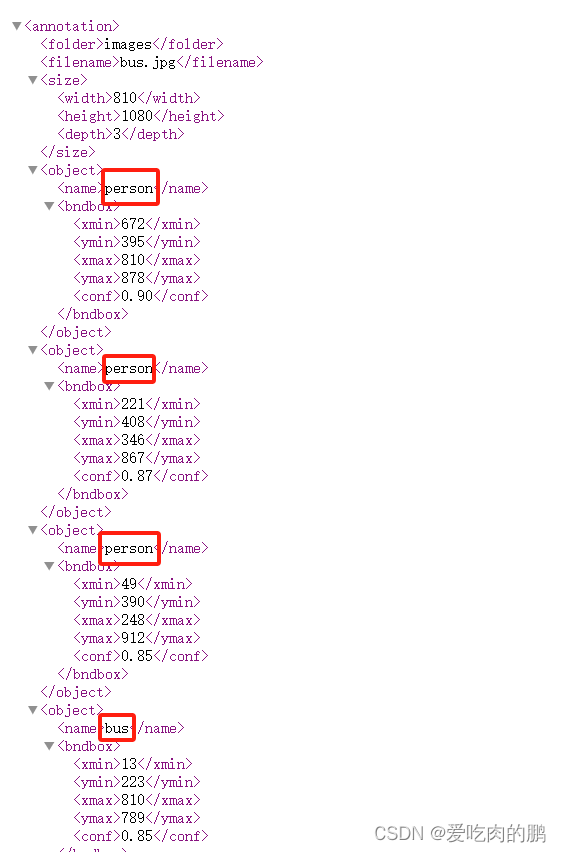 |
可以根据检测结果图像来看标注结果是否准确。
xml格式说明:<size>存放的是图像的大小,<name>标签存放的是类名,<bndbox>标签中存放的是box标签,分别对应标注框的左上角和右下角以及检测结果的置信度。【这里并未转成center_x,center_y,w,h】。xyxy->xywh的部分在我项目voc_label.py中有,具体使用说明可以参考我项目readme.md训练自己的数据集。
如果需要指定类别进行标注,可以在运行代码的时候加上--classes 以指定特定的类。
注意事项:
自动标注的结果取决于训练好的YOLOv5模型的准确率。因此,我们建议在使用自动标注功能时,用户应该先对所使用的模型进行准确性检验,以确保标注结果的可靠性。对于那些标注结果不准确的样本,用户可以通过标注工具进行手动调整,以进一步提高数据集的准确性。
需要特别说明的是,虽然我们的自动标注功能可以大大减少标注工作量,但我们并不能保证所有的标注结果都是完全准确的。这是因为目标检测本身就具有一定的误差率,而且自动标注功能仍然处于发展阶段,还有待不断的改进和优化。
在未来的更新中,我们计划增加调整边界框的功能,以帮助用户更方便地对标注结果进行调整。我们会继续努力改进自动标注功能,提高其准确率和稳定性,以满足用户在目标检测任务中的需求。
标注代码如下(建议还是clone我项目代码中使用):
# 该脚本的功能是通过已训练好的模型自动标注数据集
# 2024.01.28
# 作者:yinyipeng
# 邮箱:15930920977@163.com
import os
import argparse
import torch
from pathlib import Path
import cv2
import xml.etree.cElementTree as ET
from models.experimental import attempt_load
from utils.datasets import LoadImages
from utils.general import set_logging, check_img_size, non_max_suppression, scale_coords, colorstr, increment_path, \
print_args
from utils.plots import Annotator, colors
from utils.torch_utils import select_device, time_sync
FILE = Path(__file__).resolve()
def create_xml_file(image_name, img0, detections, save_path):
'''
image_name:图像名称
img0:原始图像
detections:检测结果。列表形式,每个列表中对应该图像所有目标(dict形式)
'''
h, w, c = img0.shape
root = ET.Element('annotation')
folder = ET.SubElement(root, "folder")
folder.text = 'images'
filename = ET.SubElement(root, "filename")
filename.text = image_name
size = ET.SubElement(root, "size")
width = ET.SubElement(size, "width")
width.text = str(w)
height = ET.SubElement(size, "height")
height.text = str(h)
depth = ET.SubElement(size, "depth")
depth.text = str(c)
for detection in detections:
object = ET.SubElement(root, "object")
name = ET.SubElement(object, "name")
name.text = detection["class"] # 获得类名
# boxes信息
bndbox = ET.SubElement(object, "bndbox")
xmin = ET.SubElement(bndbox, "xmin")
xmin.text = str(detection["xmin"])
ymin = ET.SubElement(bndbox, "ymin")
ymin.text = str(detection["ymin"])
xmax = ET.SubElement(bndbox, "xmax")
xmax.text = str(detection["xmax"])
ymax = ET.SubElement(bndbox, "ymax")
ymax.text = str(detection["ymax"])
conf = ET.SubElement(bndbox, "conf")
conf.text = detection["conf"]
tree = ET.ElementTree(root)
xml_file_path = f"{image_name.split('.')[0]}.xml" # 生成的XML文件名与图像文件名相同
tree.write(os.path.join(save_path, xml_file_path))
@torch.no_grad()
def run(weights='yolov5s.pt', # model.pt path(s)
source='data/images', # file/dir/URL/glob, 0 for webcam
imgsz=640, # inference size (pixels)
conf_thres=0.25, # confidence threshold
iou_thres=0.45, # NMS IOU threshold
max_det=1000, # maximum detections per image
device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
nosave=False, # do not save images/videos
classes=None, # filter by class: --class 0, or --class 0 2 3
agnostic_nms=False, # class-agnostic NMS
augment=False, # augmented inference
project='runs/Datasets', # save results to project/name
name='DetectImages', # save results to project/name
line_thickness=3, # bounding box thickness (pixels)
hide_labels=False, # hide labels
hide_conf=False, # hide confidences
half=False, # use FP16 half-precision inference
exist_ok=False
):
source = str(source)
save_img = not nosave and not source.endswith('.txt') # save inference images
save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
(save_dir).mkdir(parents=True, exist_ok=True) # make dir
# Initialize
set_logging()
device = select_device(device)
half &= device.type != 'cpu' # half precision only supported on CUDA
# Load model
w = str(weights[0] if isinstance(weights, list) else weights)
_, _ = 64, [f'class{i}' for i in range(1000)] # assign defaults
model = torch.jit.load(w) if 'torchscript' in w else attempt_load(weights, map_location=device)
stride = int(model.stride.max()) # model stride
names = model.module.names if hasattr(model, 'module') else model.names # get class names
if half:
model.half() # to FP16
imgsz = check_img_size(imgsz, s=stride) # check image size
# Dataloader
dataset = LoadImages(source, img_size=imgsz, stride=stride, auto=True)
bs = 1 # batch_size
# Run inference
if device.type != 'cpu': # 如果为pt文件且为GPU
model(torch.zeros(1, 3, *imgsz).to(device).type_as(next(model.parameters()))) # run once
dt, seen = [0.0, 0.0, 0.0], 0
for path, img, im0s, vid_cap in dataset:
pred_list = []
t1 = time_sync()
img = torch.from_numpy(img).to(device)
img = img.half() if half else img.float() # uint8 to fp16/32
img = img / 255.0 # 0 - 255 to 0.0 - 1.0
if len(img.shape) == 3:
img = img[None] # expand for batch dim
t2 = time_sync()
dt[0] += t2 - t1 # 记录图像处理时间
# Inference
visualize = False
pred = model(img, augment=augment, visualize=visualize)[0]
t3 = time_sync()
dt[1] += t3 - t2 # 记录推理时间(不含NMS)
# NMS
pred = non_max_suppression(pred, conf_thres, iou_thres, classes, agnostic_nms, max_det=max_det)
dt[2] += time_sync() - t3 # 记录含NMS时间
# Process predictions
for i, det in enumerate(pred): # per image
seen += 1
p, s, im0, frame = path, '', im0s.copy(), getattr(dataset, 'frame', 0)
p = Path(p) # to Path
save_path = str(save_dir / p.name) # img.jpg
s += '%gx%g ' % img.shape[2:] # print string
annotator = Annotator(im0, line_width=line_thickness, example=str(names))
if len(det): # 获取目标数量
# Rescale boxes from img_size to im0 size
det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
# det shape [number of targets,6],6:x1y1x2y2,conf,cls
# Print results
for c in det[:, -1].unique():
n = (det[:, -1] == c).sum() # detections per class
s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
for i in range(len(det)):
# get class name
class_name = names[int(det[i, -1].cpu())]
pred_dict = {}
pred_dict['class'] = class_name
pred_dict['xmin'] = int(det[i, 0].cpu())
pred_dict['ymin'] = int(det[i, 1].cpu())
pred_dict['xmax'] = int(det[i, 2].cpu())
pred_dict['ymax'] = int(det[i, 3].cpu())
pred_dict['conf'] = f'{det[i, -2]:.2f}'
pred_list.append(pred_dict)
# Write results
for *xyxy, conf, cls in reversed(det):
if save_img: # Add bbox to image
c = int(cls) # integer class
label = None if hide_labels else (names[c] if hide_conf else f'{names[c]} {conf:.2f}')
annotator.box_label(xyxy, label, color=colors(c, True))
# Print time (inference-only)
print(f'{s}Done. ({t3 - t2:.3f}s)')
create_xml_file(p.name, im0, pred_list, save_dir)
# Stream results
im0 = annotator.result()
# Save results (image with detections)
if save_img:
if dataset.mode == 'image':
cv2.imwrite(save_path, im0)
# Print results
t = tuple(x / seen * 1E3 for x in dt) # speeds per image
print(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {(1, 3, *imgsz)}' % t)
if save_img:
print(f"Results saved to {colorstr('bold', save_dir)}{''}")
def parse_opt():
parser = argparse.ArgumentParser()
parser.add_argument('--weights', nargs='+', type=str, default='../yolov5s.pt', help='model path(s)')
parser.add_argument('--source', type=str, default='../data/images', help='file/dir/')
parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')
parser.add_argument('--conf-thres', type=float, default=0.25, help='confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.45, help='NMS IoU threshold')
parser.add_argument('--max-det', type=int, default=1000, help='maximum detections per image')
parser.add_argument('--device', default='0', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--nosave', action='store_true', help='do not save images/videos')
parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --classes 0, or --classes 0 2 3')
parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
parser.add_argument('--augment', action='store_true', help='augmented inference')
parser.add_argument('--project', default='../runs/Datasets', help='save results to project/name')
parser.add_argument('--name', default='DetectImages', help='save results to project/name')
parser.add_argument('--line-thickness', default=3, type=int, help='bounding box thickness (pixels)')
parser.add_argument('--hide-labels', default=False, action='store_true', help='hide labels')
parser.add_argument('--hide-conf', default=False, action='store_true', help='hide confidences')
parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
opt = parser.parse_args()
opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
print_args(FILE.stem, opt)
return opt
def main(opt):
run(**vars(opt))
if __name__ == "__main__":
opt = parse_opt()
main(opt)














 723
723











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











