









引言
刚体 6DOF 模型的理论(WSF_RIGID_BODY_SIX_DOF_MOVER, WsfRigidBodySixDOF_Mover)与前述的 P6DOF 相同,可通过 P6DOF 理论文章进行研究。当 WSF_P6DOF_MOVER 被移除时,该文档将被并入此文档中。
WSF_POINT_MASS_SIX_DOF_MOVER 旨在填补 3DOF 模型(如 WSF_GUIDED_MOVER 和 WSF_AIR_MOVER)与完整 6DOF 模型(如 WSF_P6DOF_MOVER 和 WSF_RIGID_BODY_SIX_DOF_MOVER)之间的差距。
在 3DOF 模型中,必须假设其方向的某些元素,而完整的 6DOF 模型将根据角动量守恒((\Sigma M = I \dot{\omega}))来传播方向。这种方法在运动学上是正确的,但要求数据的准确性可能不切实际。具体而言,净力矩需要准确及时地了解施加在物体上的力的分布,而惯性张量则需要了解物体内部质量的分布。
PointMass 六自由度移动器使用基于效应的系统来估计 (\dot{\omega}),尽可能由可直接测量或假设的旋转数据组成。与类似模型一样,PM6DOF 模型的气动力系数应代表在给定空速和迎角下的平衡(零净力矩)状态。旋转速率由主动飞行员(人工或其他方式)命令,或生成以模拟气动稳定性或不稳定性的效果。
推力大小的计算与刚体模型使用的方法相同,但运动模型的性质要求推力矢量控制也必须基于效应。此外,目前对于 PointMass 车辆不考虑推力反向。
符号列表
| Symbol | Definition | SixDOF Command | SixDOF Script Method |
|---|---|---|---|
|
| angle of attack | ||
|
| angle of side slip | ||
|
| total angle of attack | ||
|
| Mach number | ||
|
| time | ||
|
| body roll rate | ||
|
| body pitch rate | ||
|
| body yaw rate | ||
|
| body roll acceleration | ||
|
| body pitch acceleration | ||
|
| body yaw acceleration | ||
|
| rotational velocity vector | ||
|
| rotational acceleration vector | ||
|
| total limit of angular acceleration from controls | ||
|
| limit of angular acceleration from aerodynamic controls | ||
|
| value of
at dry weight under standard sea-level conditions | ||
|
| limit of angular acceleration from propulsive controls | ||
|
| value of
at dry weight | ||
|
| natural frequency of the stabilizing aerodynamic response | ||
|
| value of at dry weight under standard sea-level conditions | ||
|
| current mass | ||
|
| empty mass | ||
|
| moment of inertia matrix | moment_of_inertia_ixx, moment_of_inertia_iyy, moment_of_inertia_izz | |
|
| total moment | ||
|
| engine thrust, dependent on the engine type | ||
|
| density of the atmosphere at the vehicle’s current altitude | ||
|
| standard density of the atmosphere at the ellipsoid surface |
运动方程
与刚体模型一样,线性运动是加速度的二阶积分,依据动量守恒法则进行计算。
方向同样是角加速度的二阶积分,但与刚体模型不同的是,PointMass 移动器并未真正考虑角动量
![]()
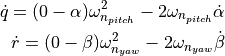
角加速度仅仅是通过控制能力和(去)稳定效应构建而成
P6DOF 理论》文档中详细讨论了这些微分方程的积分方法(见“运动方程”),我们在此不再重复。
控制力与旋转
尽管 PM6DOF 上的力与 RB6DOF 的求和方式相同,但角加速度是通过一种抽象的方式构建的,从而省略了对车辆实际扭矩的考虑。
对于无导引弹药(如炸弹、火箭和诱饵)不需要提供控制响应数据,但对于需指导或驾驶的车辆则是必需的。基线角加速度限制在用户定义的表格中提供,并与马赫数相关,然后根据空气密度和迎角效应进行修改。角加速度表应根据车辆或车辆类别的参考数据来确定,也可以通过运动学估计。
例如,考虑一架合理的战斗机,它在马赫 0.8 的情况下能在一秒内从翼水平状态加速到 180 deg/s 的滚转速率。在这种情况下,应该至少将其峰值加速度指定为 180 deg/s² 在马赫 0.8 时——为了考虑高度和任何稳定效应,可能还需要更高的数值(见下文“稳定旋转效应”)。
注意,不同类型的车辆在马赫数的变化会有所不同,但合理的初步策略是将加速度限制与马赫的平方成比例缩放,因为气动扭矩与速度的平方成比例缩放。气动力中心的变化或在跨声速和超声速区域中降低控制权的控制器可以通过在这些马赫数下从初始估计值中减少最大加速度来近似。
(1)
![]()
These corrections account for reduced control efficacy at higher altitudes and at higher slip angles, and for changes in inertia as mass is added or removed.
A separate, second term is added to account for the effects of thrust vectoring given some amount of thrust.
(2)
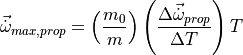
Thrust itself is modeled as a function of altitude, so additional altitude effects are not considered. To account for increased agility as fuel is burned away, a mass factor is introduced.
(3)
![]()
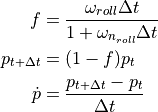
The stick-and-rudder flight controls on a PM6DOF are mapped directly to rotational rate commands. This map is a 1D table defined by the user in script, which allows for linear or nonlinear mappings. The rotational rate commands are achieved via a linear ramp, with a slope limited by the angular acceleration limit.
(4)
![]()
稳定旋转效应
稳定效应对无导引弹丸的影响最为明显。默认情况下,PM6DOF 车辆在没有飞行员采取任何行动的情况下,没有改变其旋转速率的倾向。这包括迎风指向或“风向调整”。
可以通过添加表格来引入这种效应,这些表格指定了基线稳定频率与马赫数的关系。这些频率指定了未受控车辆在返回平衡状态时的临界阻尼系统响应。目前,平衡状态为:俯仰轴的迎角为 0 度,偏航轴的侧滑角为 0 度,滚转轴的滚转速率为 0 deg/s。未来版本中可能会引入设置,以允许对平衡状态进行修改,例如为飞机设置非零迎角,或为弹丸指定旋转速率。
与控制加速度数据一样,输入参数会根据负载和操作空气密度的变化进行调整。
(5)¶
![]()
The response frequency is then translated into a rotational acceleration for the pitch and yaw axes:
(6)
For the roll axis, we are affecting rotation rate rather than rotation, so a first-order lag system is employed:
(7)
To avoid overshoot and numerical instability, these accelerations are limited based on kinematic extrapolations:
(8)
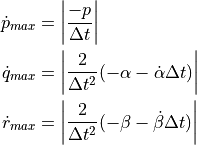
The final rotational acceleration for a PM6DOF is the sum of the control acceleration and stabilizing accelerations.

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











