







[t,y]=solver('F',tspan,y0)
function ydot=F(t,y)
ydot=[function1;function2;function3;....]
functionn是以列向量形式组成为系统的状态方程(一阶微分方程组)
tspan运算的起止时间[t0,t1]
y0为初始状态值,用列向量来表示,维数为状态向量数
时域响应函数:
initial(零输入响应)
impulse(单位冲击响应)
step(单位阶跃响应)
lsim(任意输入响应)
频域响应函数:
bode(系统频率响应-伯德图曲线)
nyquist(系统奈奎斯特曲线)
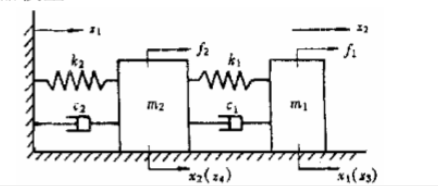
单自由度振动系统和多自由度振动系统:---自由度:状态变量的个数
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 451
451

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











