







 本文介绍了空间滤波中的平滑线性滤波器,特别是均值滤波器。均值滤波通过邻域像素的平均值来降低图像噪声,但可能导致边缘模糊。此外,还探讨了加权平均的均值滤波器和中值滤波器,后者在处理椒盐噪声时表现出色。OpenCV提供了实现这两种滤波器的函数,但均值滤波可能在边界处理上存在问题。
本文介绍了空间滤波中的平滑线性滤波器,特别是均值滤波器。均值滤波通过邻域像素的平均值来降低图像噪声,但可能导致边缘模糊。此外,还探讨了加权平均的均值滤波器和中值滤波器,后者在处理椒盐噪声时表现出色。OpenCV提供了实现这两种滤波器的函数,但均值滤波可能在边界处理上存在问题。
平滑线性滤波器,均值滤波
平滑线性空间滤波器的输出(响应)是包含在滤波器模板邻域内的像素的简单平均值。这些滤波器有时也称为均值滤波器。也可以把它们归入低通滤波器。
这种处理的结果降低了图像灰度的尖锐变化。由于典型的随机噪声由灰度级的急剧变化组成,因此常见的平滑处理的应用就是降噪。
然而,由于图像边缘(几乎总是一幅图像希望有的特性)也是由图像灰度尖锐变化带来的特性,所以均值滤波器处理还是存在着不希望有的边缘模糊的负面效应。
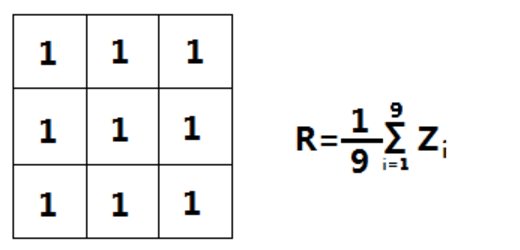
下面这幅图中的是最为常见的简单平均的滤波器模板:
一种加权平均的均值滤波器:

在这个例子所示的模板中,中心位置的系数最大,因此在均值计算中可以为该像素提供更大的权重。其他像素离中心越近就赋予越大的权重。
这种加权重的策略的目的是,在平滑处理中,试图降低模糊。
均值滤波公式

openCV的均值滤波器:
void menValueFilters(){
auto im =  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 5783
5783

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









