





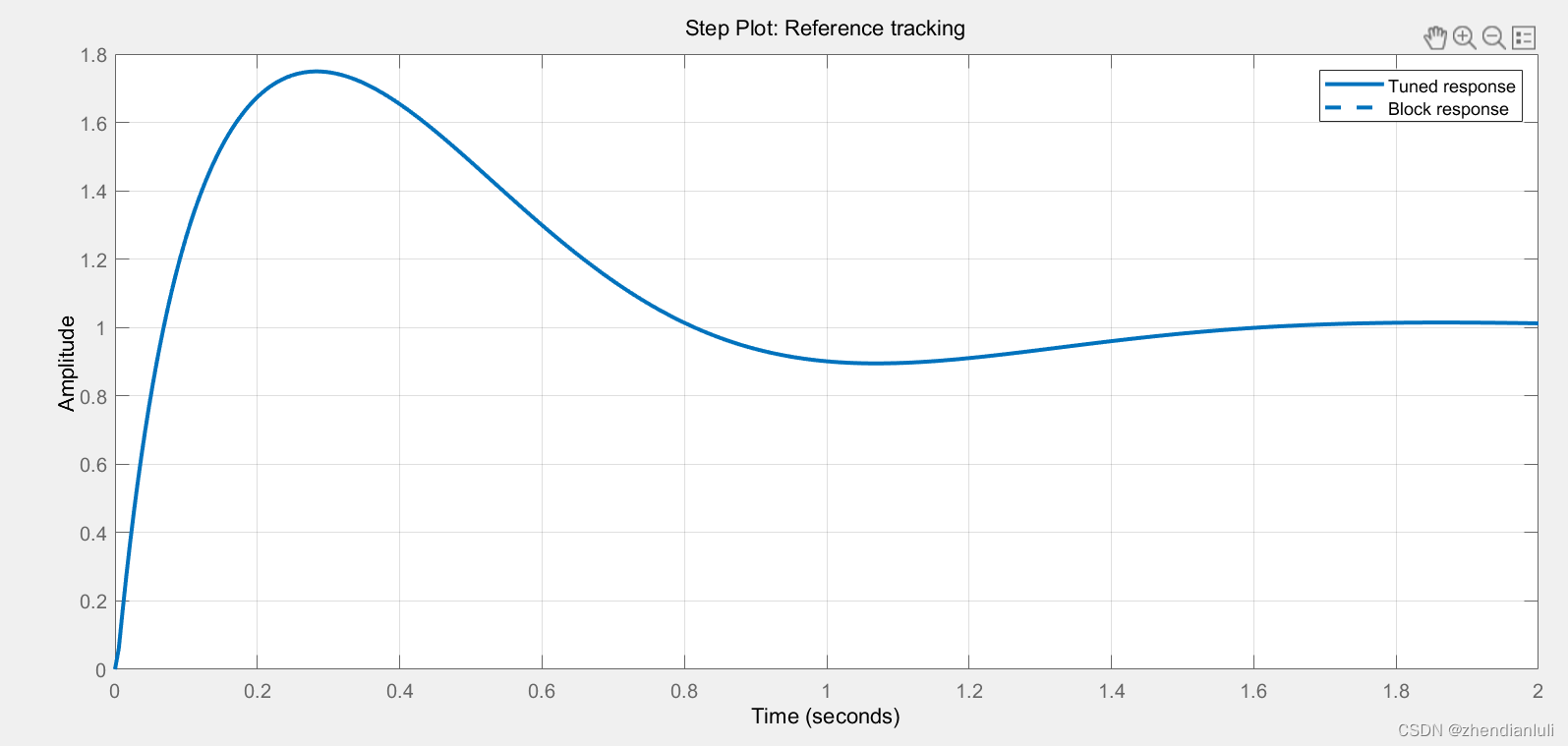
响应曲线
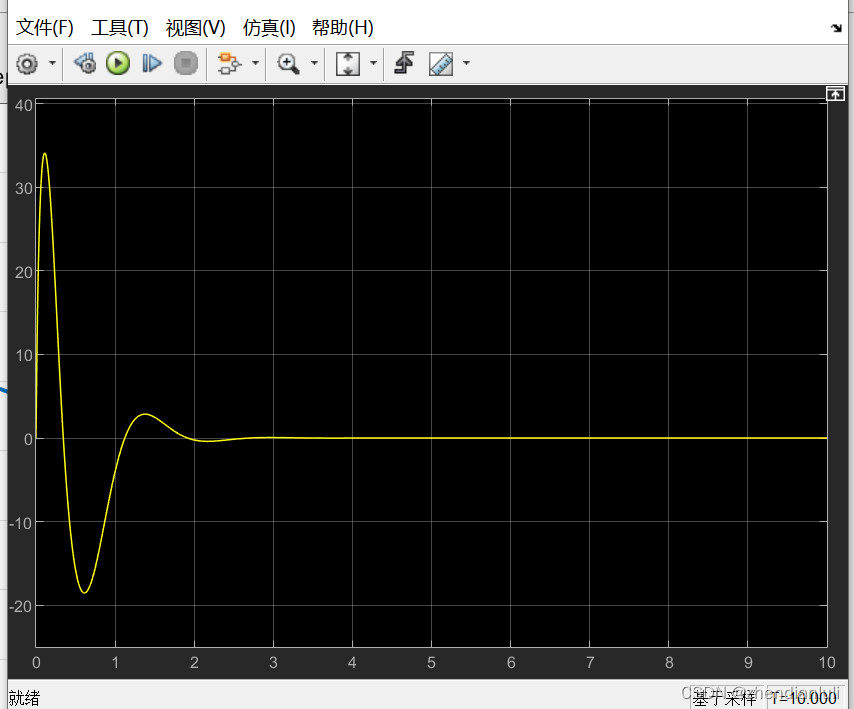
信号变化

平稳行驶的小车
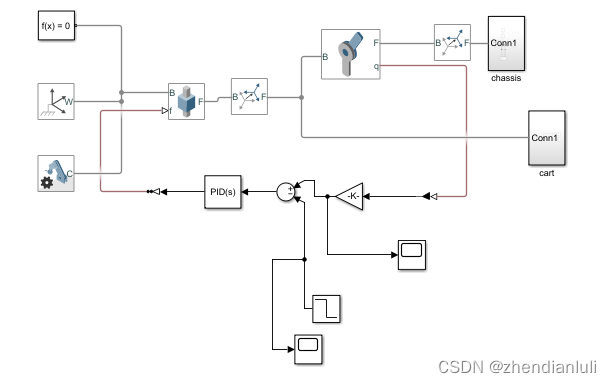
simulink仿真图
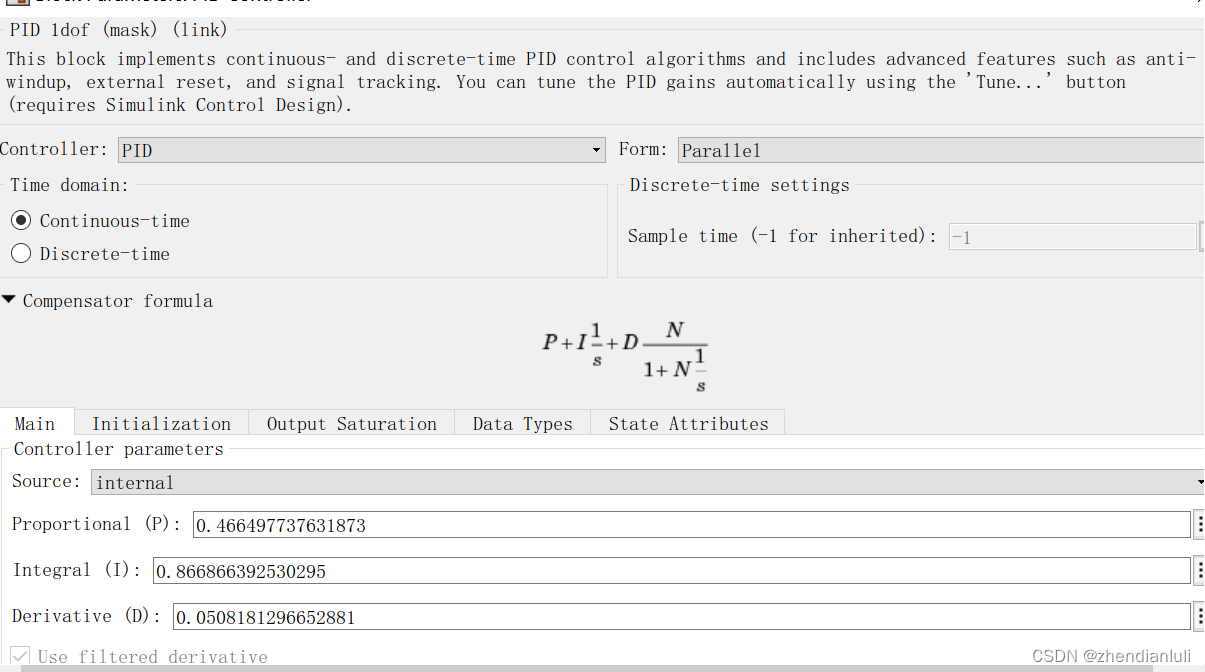
自动调谐PID参数
参考来源;
基于PID控制和人工调谐的两轮自平衡机器人三维模型matlab simulink仿真建模

响应曲线
信号变化
平稳行驶的小车
simulink仿真图
自动调谐PID参数
参考来源;
基于PID控制和人工调谐的两轮自平衡机器人三维模型matlab simulink仿真建模
 1201
645
1201
645

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























