






Simulink仿真
通过对两轮自平衡小车系统进行动力学分析和数学建模,在理论上设计出了控制方法。下面,调用 Matlab 软件的 Simulink 仿真工具包对两轮自平衡小车的控制系统数学模型进行仿真验证,观察角度在干扰信号的作用下的自恢复情况。
在 Simulink 文件中,建立两轮自平衡小车的数学模型,调用 PID 控制器构成控制系统的主要部分。设定输入信号值为 0,代表角度初始值为 0,小车初始在平衡位置。对输出节点,调用两个 Step 模块,通过设定 Step Time,使之构成宽度为 1s 的脉冲信号作为小车的外力干扰作用信号。整体系统构成负反馈形式,如下图所示。
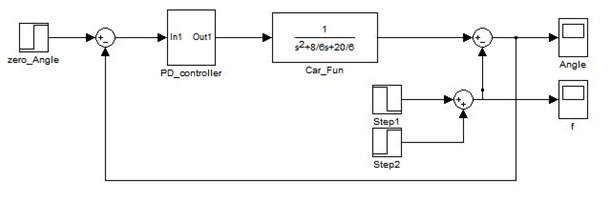 Image 3.4.1 - 两轮自平衡小车控制系统数学模型的 Simulink 仿真 alt ><
Image 3.4.1 - 两轮自平衡小车控制系统数学模型的 Simulink 仿真 alt ><
仿真系统中示波器 Angle 与 f 分别表示角度变化波形与外力作用信号波形。点击运行,可以看到外力作用为标准的脉冲信号。如下图所示。
 Image 3.4.2 - 外界干扰信号波形图 alt ><
Image 3.4.2 - 外界干扰信号波形图 alt ><
此时,在脉冲信号作为干扰的情况下,Angle 示波器中显示了车体角度的变化值。如下图所示。
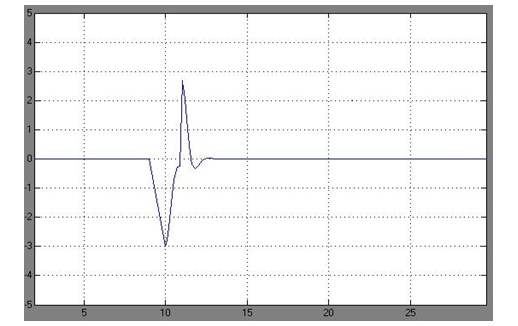 Image 3.4.3 - 车体角度自恢复过程仿真波形 alt ><
Image 3.4.3 - 车体角度自恢复过程仿真波形 alt ><
通过波形可以看出,角度在外界干扰的情况下,能够在一定时间内自动恢复到稳定状态。这证明了前文建立的两轮自平衡小车控制系统的数学模型是有效的,也为接下来设计小车的软硬件系统提供了坚实的控制理论基础。















 2008
2008











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









