






目录
一、理论基础
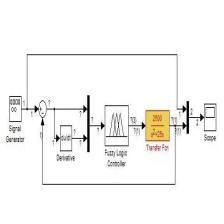
首先,整个系统的基本结构如下所示:

根据题目的意思,主要是通过设计一种控制器实现小车在行驶过程中倒立摆的动态平衡。
首先,上面的这个模型等效模型如下所示:

其中用到的参数如下所示:

 该博客介绍了如何使用Matlab的Simulink进行小车倒立摆动态平衡的控制器仿真。文章从理论基础出发,详细阐述了系统结构,并展示了部分simulink模型,最后进行了仿真结论的分析。
该博客介绍了如何使用Matlab的Simulink进行小车倒立摆动态平衡的控制器仿真。文章从理论基础出发,详细阐述了系统结构,并展示了部分simulink模型,最后进行了仿真结论的分析。
目录
首先,整个系统的基本结构如下所示:
根据题目的意思,主要是通过设计一种控制器实现小车在行驶过程中倒立摆的动态平衡。
首先,上面的这个模型等效模型如下所示:
其中用到的参数如下所示:
 154
230
154
230

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文























