







目录
I2C 是最常用的通信接口,众多的传感器都会提供I2C 接口来和主控相连,比如陀螺仪、加速度计、触摸屏等等。所以I2C 是做嵌入式开发必须掌握的,I.MX6U 有4 个I2C 接口,可以通过这4 个I2C 接口来连接一些I2C 外设。I.MX6U-ALPHA 使用I2C1 接口连接了一个距离传感器AP3216C,本章我们就来学习如何使用I.MX6U 的I2C 接口来驱动AP3216C,读取AP3216C 的传感器数据。


I2C & AP3216C 简介
I2C 协议
I2C 是很常见的一种总线协议, I2C 是 NXP 公司设计的, I2C 使用两条线在主控制器和从机之间进行数据通信。一条是 SCL(串行时钟线),另外一条是 SDA(串行数据线),这两条数据线需要接上拉电阻,总线空闲的时候 SCL 和 SDA 处于高电平。 I2C 总线标准模式下速度可以达到 100Kb/S,快速模式下可以达到 400Kb/S。 I2C 总线工作是按照一定的协议来运行的,接下来就看一下 I2C 协议。
I2C 是支持多从机的,也就是一个 I2C 控制器下可以挂多个 I2C 从设备,这些不同的 I2C从设备有不同的器件地址,这样 I2C 主控制器就可以通过 I2C 设备的器件地址访问指定的 I2C设备了,一个 I2C 总线连接多个 I2C 设备如下图所示:
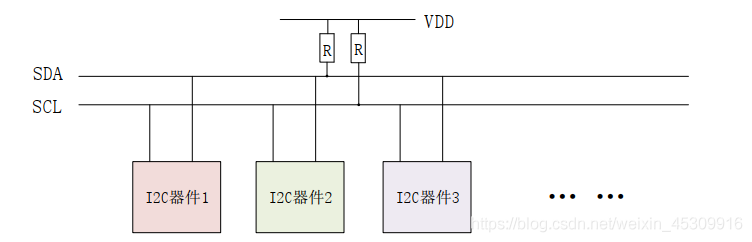
图26.1.1.1 I2C 多个设备连接结构图
上图中 SDA 和 SCL 这两根线必须要接一个上拉电阻,一般是 4.7K。其余的 I2C 从器件都挂接到 SDA 和 SCL 这两根线上,这样就可以通过 SDA 和 SCL 这两根线来访问多个 I2C设备。
接下来看一下I2C 协议有关的术语:
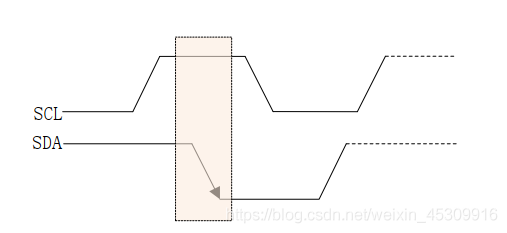
起始位
顾名思义,也就是 I2C 通信起始标志,通过这个起始位就可以告诉 I2C 从机,“我”要开始进行 I2C 通信了。在 SCL 为高电平的时候, SDA 出现下降沿就表示为起始位,如下图所示:
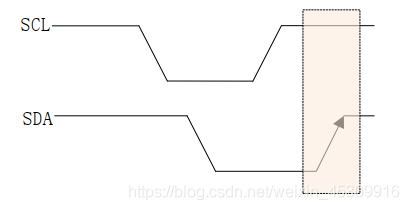
2、停止位
停止位就是停止 I2C 通信的标志位,和起始位的功能相反。在 SCL 位高电平的时候, SDA出现上升沿就表示为停止位,如下图所示:
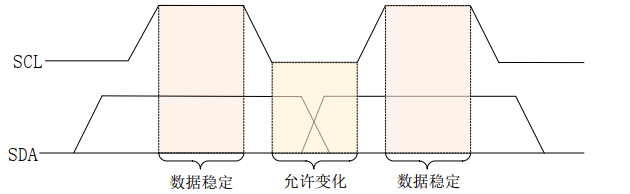
3、数据传输
I2C 总线在数据传输的时候要保证在 SCL 高电平期间, SDA 上的数据稳定,因此 SDA 上的数据变化只能在 SCL 低电平期间发生,如下图所示:
4、应答信号
当 I2C 主机发送完 8 位数据以后会将 SDA 设置为输入状态,等待 I2C 从机应答,也就是等到 I2C 从机告诉主机它接收到数据了。应答信号是由从机发出的,主机需要提供应答信号所需的时钟,主机发送完 8 位数据以后紧跟着的一个时钟信号就是给应答信号使用的。从机通过将 SDA 拉低来表示发出应答信号,表示通信成功,否则表示通信失败。
5、I2C 写时序(主机向从机)
主机通过 I2C 总线与从机之间进行通信不外乎两个操作:写和读, I2C 总线单字节写时序如下图所示:

上图就是 I2C 写时序,我们来看一下写时序的具体步骤:
- 1)、开始信号。
- 2)、发送 I2C 设备地址,每个 I2C 器件都有一个设备地址,通过发送具体的设备地址来决定访问哪个 I2C 器件。这是一个 8 位的数据,其中高 7 位是设备地址,最后 1 位是读写位,为1 的话表示这是一个读操作,为 0 的话表示这是一个写操作。
- 3)、 I2C 器件地址后面跟着一个读写位,为 0 表示写操作,为 1 表示读操作。
- 4)、从机发送的 ACK 应答信号。
- 5)、重新发送开始信号。
- 6)、发送要写写入数据的寄存器地址。
- 7)、从机发送的 ACK 应答信号
- 8)、发送要写入寄存器的数据。
- 9)、从机发送的 ACK 应答信号。
- 10)、停止信号。
6、I2C 读时序(主机向从机)
I2C 总线单字节读时序如下图所示:

I2C 单字节读时序比写时序要复杂一点,读时序分为 4 大步,第一步是发送设备地址,第二步是发送要读取的寄存器地址,第三步重新发送设备地址,最后一步就是 I2C 从器件输出要读取的寄存器值,我们具体来看一下这步。
- 1)、主机发送起始信号。
- 2)、主机发送要读取的 I2C 从设备地址。
- 3)、读写控制位,因为是向 I2C 从设备发送数据,因此是写信号。
- 4)、从机发送的 ACK 应答信号。
- 5)、重新发送 START 信号。
- 6)、主机发送要读取的寄存器地址。
- 7)、从机发送的 ACK 应答信号。
- 8)、重新发送 START 信号。
- 9)、重新发送要读取的 I2C 从设备地址。
- 10)、读写控制位,这里是读信号,表示接下来是从 I2C 从设备里面读取数据。
- 11)、从机发送的 ACK 应答信号。
- 12)、从 I2C 器件里面读取到的数据。
- 13)、主机发出 NO ACK 信号,表示读取完成,不需要从机再发送 ACK 信号了。
- 14)、主机发出 STOP 信号,停止 I2C 通信。
7、I2C 多字节读写时序
有时候我们需要读写多个字节,多字节读写时序和单字节的基本一致,只是在读写数据的时候可以连续发送多个自己的数据,其他的控制时序都是和单字节一样的。
I.MX6U I2C 简介
I.MX6U 提供了4 个I2C 外设,通过这四个I2C 外设即可完成与I2C 从器件进行通信,I.MX6U 的I2C 外设特性如下:
①、与标准I2C 总线兼容。
②、多主机运行
③、软件可编程的64 中不同的串行时钟序列。
④、软件可选择的应答位。
⑤、开始/结束信号生成和检测。
⑥、重复开始信号生成。
⑦、确认位生成。
⑧、总线忙检测
I.MX6U 的I2C 支持两种模式:标准模式和快速模式,标准模式下I2C 数据传输速率最高是100Kbits/s,在快速模式下数据传输速率最高为400Kbits/s。
我们接下来看一下I2C 的几个重要的寄存器,首先看一下I2Cx_IADR(x=1~4)寄存器,这是I2C 的地址寄存器,此寄存器结构如图26.1.2.1 所示:

寄存器I2Cx_IADR 只有ADR(bit7:1)位有效,用来保存I2C 从设备地址数据。当我们要访问某个I2C 从设备的时候就需要将其设备地址写入到ADR 里面。接下来看一下寄存器I2Cx_IFDR,这个是I2C 的分频寄存器,寄存器结构如图26.1.2.2 所示:

寄存器I2Cx_IFDR 也只有IC(bit5:0)这个位,用来设置I2C 的波特率,I2C 的时钟源可以选择IPG_CLK_ROOT=66MHz,通过设置IC 位既可以得到想要的I2C 波特率。IC 位可选的设置如图26.1.2.3 所示:

图26.1.2.3 IC 设置
不像其他外设的分频设置一样可以随意设置,图26.1.2.3 中列出了IC 的所有可选值。比如现在I2C 的时钟源为66MHz,我们要设置I2C 的波特率为100KHz,那么IC 就可以设置为0X15,也就是640 分频。66000000/640=103.125KHz≈100KHz。
接下来看一下寄存器I2Cx_I2CR,这个是I2C 控制寄存器,此寄存器结构如图26.1.2.4 所示:

寄存器I2Cx_I2CR 的各位含义如下:
IEN(bit7):I2C 使能位,为1 的时候使能I2C,为0 的时候关闭I2C。
IIEN(bit6):I2C 中断使能位,为1 的时候使能I2C 中断,为0 的时候关闭I2C 中断。
MSTA(bit5):主从模式选择位,设置IIC 工作在主模式还是从模式,为1 的时候工作在主模式,为0 的时候工作在从模式。
MTX(bit4):传输方向选择位,用来设置是进行发送还是接收,为0 的时候是接收,为1 的时候是发送。
TXAK(bit3):传输应答位使能,为0 的话发送ACK 信号,为1 的话发送NO ACK 信号。
RSTA(bit2):重复开始信号,为1 的话产生一个重新开始信号。
接下来看一下寄存器I2Cx_I2SR,这个是I2C 的状态寄存器,寄存器结构如图26.1.2.5 所示:

寄存器I2Cx_I2SR 的各位含义如下:
ICF(bit7):数据传输状态位,为0 的时候表示数据正在传输,为1 的时候表示数据传输完成。
IAAS(bit6):当为1 的时候表示I2C 地址,也就是I2Cx_IADR 寄存器中的地址是从设备地址。
IBB(bit5):I2C 总线忙标志位,当为0 的时候表示I2C 总线空闲,为1 的时候表示I2C 总线忙。
IAL(bit4):仲裁丢失位,为1 的时候表示发生仲裁丢失。
SRW(bit2):从机读写状态位,当I2C 作为从机的时候使用,此位用来表明主机发送给从机的是读还是写命令。为0 的时候表示主机要向从机写数据,为1 的时候表示主机要从从机读取数据。
IIF(bit1):I2C 中断挂起标志位,当为1 的时候表示有中断挂起,此位需要软件清零。
RXAK(bit0):应答信号标志位,为0 的时候表示接收到ACK 应答信号,为1 的话表示检测到NO ACK 信号。
最后一个寄存器就是I2Cx_I2DR,这是I2C 的数据寄存器,此寄存器只有低8 位有效,当要发送数据的时候将要发送的数据写入到此寄存器,如果要接收数据的话直接读取此寄存器即可得到接收到的数据。
关于I2C 的寄存器就介绍到这里,关于这些寄存器详细的描述,请参考《I.MX6ULL 参考手册》第1462 页的31.7 小节。
AP3216C 简介
I.MX6U-ALPHA 开发板上通过I2C1 连接了一个三合一环境传感器:AP3216C,AP3216C是由敦南科技推出的一款传感器,其支持环境光强度(ALS)、接近距离(PS)和红外线强度(IR)这三个环境参数检测。该芯片可以通过IIC 接口与主控制相连,并且支持中断,AP3216C 的特点如下:
①、I2C 接口,快速模式下波特率可以到400Kbit/S
②、多种工作模式选择:ALS、PS+IR、ALS+PS+IR、PD 等等。
③、内建温度补偿电路。
④、宽工作温度范围(-30°C ~ +80°C)。
⑤、超小封装,4.1mm x 2.4mm x 1.35mm
⑥、环境光传感器具有16 位分辨率。
⑦、接近传感器和红外传感器具有10 位分辨率。
AP3216C 常被用于手机、平板、导航设备等,其内置的接近传感器可以用于检测是否有物体接近,比如手机上用来检测耳朵是否接触听筒,如果检测到的话就表示正在打电话,手机就会关闭手机屏幕以省电。也可以使用环境光传感器检测光照强度,可以实现自动背光亮度调节。
AP3216C 结构如图26.1.3.1 所示:

AP3216 的设备地址为0X1E,同几乎所有的I2C 从器件一样,AP3216C 内部也有一些寄存器,通过这些寄存器我们可以配置AP3216C 的工作模式,并且读取相应的数据。AP3216C 我们用的寄存器如表26.1.3.1 所示:


在表26.1.3.1 中,0X00 这个寄存器是模式控制寄存器,用来设置AP3216C 的工作模式,一般开始先将其设置为0X04,也就是先软件复位一次AP3216C。接下来根据实际使用情况选择合适的工作模式,比如设置为0X03,也就是开启ALS+PS+IR。从0X0A~0X0F 这6 个寄存器就是数据寄存器,保存着ALS、PS 和IR 这三个传感器获取到的数据值。如果同时打开ALS、PS 和IR 则读取间隔最少要112.5ms,因为AP3216C 完成一次转换需要112.5ms。关于AP3216C的介绍就到这里,如果要想详细的研究此芯片的话,请大家自行查阅其数据手册。
本章实验中我们通过I.MX6U 的I2C1 来读取AP3216C 内部的ALS、PS 和IR 这三个传感器的值,并且在LCD 上显示。开机会先检测AP3216C 是否存在,一般的芯片是有个ID 寄存器,通过读取ID 寄存器判断ID 是否正确就可以检测芯片是否存在。但是AP3216C 没有ID 寄存器,所以我们就通过向寄存器0X00 写入一个值,然后再读取0X00 寄存器,判断读出得到值和写入的是否相等,如果相等就表示AP3216C 存在,否则的话AP3216C 就不存在。本章的配置步骤如下:
1、初始化相应的IO
初始化I2C1 相应的IO,设置其复用功能,如果要使用AP3216C 中断功能的话,还需要设置AP3216C 的中断IO。
2、初始化I2C1
初始化I2C1 接口,设置波特率。
3、初始化AP3216C
初始化AP3216C,读取AP3216C 的数据。
硬件原理分析
本试验用到的资源如下:
①、指示灯LED0。
②、RGB LCD 屏幕。
③、AP3216C
④、串口
AP3216C 是在I.MX6U-ALPHA 开发板底板上,原理图如图26.2.1 所示:

从图26.2.1 可以看出AP3216C 使用的是I2C1,其中I2C1_SCL 使用的UART4_TXD 这个IO、I2C1_SDA 使用的是UART4_R XD 这个IO。
实验程序编写
本实验对应的例程路径为:开发板光盘-> 1、裸机例程-> 17_i2c。
本章实验在上一章例程的基础上完成,更改工程名字为“ap3216c”,然后在bsp 文件夹下创建名为“i2c”和“ap3216c”的文件夹。在bsp/i2c 中新建bsp_i2c.c 和bsp_i2c.h 这两个文件,在bsp/ap3216c 中新建bsp_ap3216c.c 和bsp_ap3216c.h 这两个文件。bsp_i2c.c 和bsp_i2c.h 是I.MX6U 的I2C 文件,bsp_ap3216c.c 和bsp_ap3216c.h 是AP3216C 的驱动文件。在sp_i2c.h 中输入如下内容:
1 #ifndef _BSP_I2C_H
2 #define _BSP_I2C_H
3 /***************************************************************
4 Copyright © zuozhongkai Co., Ltd. 1998-2019. All rights reserved.
5 文件名: bsp_i2c.h
6 作者: 左忠凯
7 版本: V1.0
8 描述: IIC驱动文件。
9 其他: 无
10 论坛: www.openedv.com
11 日志: 初版V1.0 2019/1/15 左忠凯创建
12 ***************************************************************/
13 #include "imx6ul.h"
14
15 /* 相关宏定义*/
16 #define I2C_STATUS_OK (0)
17 #define I2C_STATUS_BUSY (1)
18 #define I2C_STATUS_IDLE (2)
19 #define I2C_STATUS_NAK (3)
20 #define I2C_STATUS_ARBITRATIONLOST (4)
21 #define I2C_STATUS_TIMEOUT (5)
22 #define I2C_STATUS_ADDRNAK (6)
23
24 /*
25 * I2C方向枚举类型
26 */
27 enum i2c_direction
28 {
29 kI2C_Write = 0x0, /* 主机向从机写数据*/
30 kI2C_Read = 0x1, /* 主机从从机读数据*/
31 };
32
33 /*
34 * 主机传输结构体
35 */
36 struct i2c_transfer
37 {
38 unsigned char slaveAddress; /* 7位从机地址*/
39 enum i2c_direction direction; /* 传输方向*/
40 unsigned int subaddress; /* 寄存器地址*/
41 unsigned char subaddressSize; /* 寄存器地址长度*/
42 unsigned char *volatile data; /* 数据缓冲区*/
43 volatile unsigned int dataSize; /* 数据缓冲区长度*/
44 };
45
46 /*
47 *函数声明
48 */
49 void i2c_init(I2C_Type *base);
50 unsigned char i2c_master_start(I2C_Type *base,
unsigned char address,
enum i2c_direction direction);
51 unsigned char i2c_master_repeated_start(I2C_Type *base,
unsigned char address,
enum i2c_direction direction);
52 unsigned char i2c_check_and_clear_error(I2C_Type *base,
unsigned int status);
53 unsigned char i2c_master_stop(I2C_Type *base);
54 void i2c_master_write(I2C_Type *base, const unsigned char *buf,
unsigned int size);
55 void i2c_master_read(I2C_Type *base, unsigned char *buf,
unsigned int size);
56 unsigned char i2c_master_transfer(I2C_Type *base,
struct i2c_transfer *xfer);
57
58 #endif
第16 到22 行定义了一些I2C 状态相关的宏。第27 到31 行定义了一个枚举类型i2c_direction,此枚举类型用来表示I2C 主机对从机的操作,也就是读数据还是写数据。第36 到44 行定义了一个结构体i2c_transfer,此结构体用于I2C 的数据传输。剩下的就是一些函数声明了,总体来说bsp_i2c.h 文件里面的内容还是很简单的。接下来在文件bsp_i2c.c 里面输入如下内容:
示例代码26.3.2 bsp_i2c.c 文件代码
/***************************************************************
Copyright © zuozhongkai Co., Ltd. 1998-2019. All rights reserved.
文件名: bsp_i2c.c
作者: 左忠凯
版本: V1.0
描述: IIC驱动文件。
其他: 无
论坛: www.openedv.com
日志: 初版V1.0 2019/1/15 左忠凯创建
***************************************************************/
1 #include "bsp_i2c.h"
2 #include "bsp_delay.h"
3 #include "stdio.h"
4
5 /*
6 * @description : 初始化I2C,波特率100KHZ
7 * @param – base : 要初始化的IIC设置
8 * @return : 无
9 */
10 void i2c_init(I2C_Type *base)
11 {
12 /* 1、配置I2C */
13 base->I2CR &= ~(1 << 7); /* 要访问I2C的寄存器,首先需要先关闭I2C */
14
15 /* 设置波特率为100K
16 * I2C的时钟源来源于IPG_CLK_ROOT=66Mhz
17 * IFDR设置为0X15,也就是640分频,
18 * 66000000/640=103.125KHz≈100KHz。
19 */
20 base->IFDR = 0X15 << 0;
21
22 /* 设置寄存器I2CR,开启I2C */
23 base->I2CR |= (1<<7);
24 }
25
26 /*
27 * @description : 发送重新开始信号
28 * @param - base : 要使用的IIC
29 * @param - addrss : 设备地址
30 * @param - direction : 方向
31 * @return : 0 正常其他值出错
32 */
33 unsigned char i2c_master_repeated_start(I2C_Type *base,
unsigned char address,
enum i2c_direction direction)
34 {
35 /* I2C忙并且工作在从模式,跳出*/
36 if(base->I2SR & (1 << 5) && (((base->I2CR) & (1 << 5)) == 0))
37 return 1;
38
39 /*
40 * 设置寄存器I2CR
41 * bit[4]: 1 发送
42 * bit[2]: 1 产生重新开始信号
43 */
44 base->I2CR |= (1 << 4) | (1 << 2);
45
46 /*
47 * 设置寄存器I2DR,bit[7:0] : 要发送的数据,这里写入从设备地址
48 */
49 base->I2DR = ((unsigned int)address << 1) |
((direction == kI2C_Read)? 1 : 0);
50 return 0;
51 }
52
53 /*
54 * @description : 发送开始信号
55 * @param - base : 要使用的IIC
56 * @param - addrss : 设备地址
57 * @param - direction : 方向
58 * @return : 0 正常其他值出错
59 */
60 unsigned char i2c_master_start(I2C_Type *base,
unsigned char address,
enum i2c_direction direction)
61 {
62 if(base->I2SR & (1 << 5)) /* I2C忙*/
63 return 1;
64
65 /*
66 * 设置寄存器I2CR
67 * bit[5]: 1 主模式
68 * bit[4]: 1 发送
69 */
70 base->I2CR |= (1 << 5) | (1 << 4);
71
72 /*
73 * 设置寄存器I2DR,bit[7:0] : 要发送的数据,这里写入从设备地址
74 */
75 base->I2DR = ((unsigned int)address << 1) |
((direction == kI2C_Read)? 1 : 0);
76 return 0;
77 }
78
79 /*
80 * @description : 检查并清除错误
81 * @param - base : 要使用的IIC
82 * @param - status : 状态
83 * @return : 状态结果
84 */
85 unsigned char i2c_check_and_clear_error(I2C_Type *base,
unsigned int status)
86 {
87 if(status & (1<<4)) /* 检查是否发生仲裁丢失错误*/
88 {
89 base->I2SR &= ~(1<<4); /* 清除仲裁丢失错误位*/
90 base->I2CR &= ~(1 << 7); /* 先关闭I2C */
91 base->I2CR |= (1 << 7); /* 重新打开I2C */
92 return I2C_STATUS_ARBITRATIONLOST;
93 }
94 else if(status & (1 << 0)) /* 没有接收到从机的应答信号*/
95 {
96 return I2C_STATUS_NAK; /* 返回NAK(No acknowledge) */
97 }
98 return I2C_STATUS_OK;
99 }
100
101 /*
102 * @description : 停止信号
103 * @param - base : 要使用的IIC
104 * @param : 无
105 * @return : 状态结果
106 */
107 unsigned char i2c_master_stop(I2C_Type *base)
108 {
109 unsigned short timeout = 0XFFFF;
110
111 /* 清除I2CR的bit[5:3]这三位*/
112 base->I2CR &= ~((1 << 5) | (1 << 4) | (1 << 3));
113 while((base->I2SR & (1 << 5))) /* 等待忙结束*/
114 {
115 timeout--;
116 if(timeout == 0) /* 超时跳出*/
117 return I2C_STATUS_TIMEOUT;
118 }
119 return I2C_STATUS_OK;
120 }
121
122 /*
123 * @description : 发送数据
124 * @param - base : 要使用的IIC
125 * @param - buf : 要发送的数据
126 * @param - size : 要发送的数据大小
127 * @param - flags : 标志
128 * @return : 无
129 */
130 void i2c_master_write(I2C_Type *base, const unsigned char *buf,
unsigned int size)
131 {
132 while(!(base->I2SR & (1 << 7))); /* 等待传输完成*/
133 base->I2SR &= ~(1 << 1); /* 清除标志位*/
134 base->I2CR |= 1 << 4; /* 发送数据*/
135 while(size--)
136 {
137 base->I2DR = *buf++; /* 将buf中的数据写入到I2DR寄存器*/
138 while(!(base->I2SR & (1 << 1))); /* 等待传输完成*/
139 base->I2SR &= ~(1 << 1); /* 清除标志位*/
140
141 /* 检查ACK */
142 if(i2c_check_and_clear_error(base, base->I2SR))
143 break;
144 }
145 base->I2SR &= ~(1 << 1);
146 i2c_master_stop(base); /* 发送停止信号*/
147 }
148
149 /*
150 * @description : 读取数据
151 * @param - base : 要使用的IIC
152 * @param - buf : 读取到数据
153 * @param - size : 要读取的数据大小
154 * @return : 无
155 */
156 void i2c_master_read(I2C_Type *base, unsigned char *buf,
unsigned int size)
157 {
158 volatile uint8_t dummy = 0;
159
160 dummy++; /* 防止编译报错*/
161 while(!(base->I2SR & (1 << 7))); /* 等待传输完成*/
162 base->I2SR &= ~(1 << 1); /* 清除中断挂起位*/
163 base->I2CR &= ~((1 << 4) | (1 << 3)); /* 接收数据*/
164 if(size == 1) /* 如果只接收一个字节数据的话发送NACK信号*/
165 base->I2CR |= (1 << 3);
166
167 dummy = base->I2DR; /* 假读*/
168 while(size--)
169 {
170 while(!(base->I2SR & (1 << 1))); /* 等待传输完成*/
171 base->I2SR &= ~(1 << 1); /* 清除标志位*/
172
173 if(size == 0)
174 i2c_master_stop(base); /* 发送停止信号*/
175 if(size == 1)
176 base->I2CR |= (1 << 3);
177 *buf++ = base->I2DR;
178 }
179 }
180
181 /*
182 * @description : I2C数据传输,包括读和写
183 * @param – base : 要使用的IIC
184 * @param – xfer : 传输结构体
185 * @return : 传输结果,0 成功,其他值失败;
186 */
187 unsigned char i2c_master_transfer(I2C_Type *base,
struct i2c_transfer *xfer)
188 {
189 unsigned char ret = 0;
190 enum i2c_direction direction = xfer->direction;
191
192 base->I2SR &= ~((1 << 1) | (1 << 4)); /* 清除标志位*/
193 while(!((base->I2SR >> 7) & 0X1)){}; /* 等待传输完成*/
194 /* 如果是读的话,要先发送寄存器地址,所以要先将方向改为写*/
195 if ((xfer->subaddressSize > 0) && (xfer->direction ==
kI2C_Read))
196 direction = kI2C_Write;
197 ret = i2c_master_start(base, xfer->slaveAddress, direction);
198 if(ret)
199 return ret;
200 while(!(base->I2SR & (1 << 1))){}; /* 等待传输完成*/
201 ret = i2c_check_and_clear_error(base, base->I2SR);
202 if(ret)
203 {
204 i2c_master_stop(base); /* 发送出错,发送停止信号*/
205 return ret;
206 }
207
208 /* 发送寄存器地址*/
209 if(xfer->subaddressSize)
210 {
211 do
212 {
213 base->I2SR &= ~(1 << 1); /* 清除标志位*/
214 xfer->subaddressSize--; /* 地址长度减一*/
215 base->I2DR = ((xfer->subaddress) >> (8 *
xfer->subaddressSize));
216 while(!(base->I2SR & (1 << 1))); /* 等待传输完成*/
217 /* 检查是否有错误发生*/
218 ret = i2c_check_and_clear_error(base, base->I2SR);
219 if(ret)
220 {
221 i2c_master_stop(base); /* 发送停止信号*/
222 return ret;
223 }
224 } while ((xfer->subaddressSize > 0) && (ret ==
I2C_STATUS_OK));
225
226 if(xfer->direction == kI2C_Read) /* 读取数据*/
227 {
228 base->I2SR &= ~(1 << 1); /* 清除中断挂起位*/
229 i2c_master_repeated_start(base, xfer->slaveAddress,
kI2C_Read);
230 while(!(base->I2SR & (1 << 1))){}; /* 等待传输完成*/
231
232 /* 检查是否有错误发生*/
233 ret = i2c_check_and_clear_error(base, base->I2SR);
234 if(ret)
235 {
236 ret = I2C_STATUS_ADDRNAK;
237 i2c_master_stop(base); /* 发送停止信号*/
238 return ret;
239 }
240 }
241 }
242
243 /* 发送数据*/
244 if ((xfer->direction == kI2C_Write) && (xfer->dataSize > 0))
245 i2c_master_write(base, xfer->data, xfer->dataSize);
246 /* 读取数据*/
247 if ((xfer->direction == kI2C_Read) && (xfer->dataSize > 0))
248 i2c_master_read(base, xfer->data, xfer->dataSize);
249 return 0;
250 }
文件bsp_i2c.c中一共有8 个函数,我们依次来看一下这些函数的功能,首先是函数i2c_init,此函数用来初始化I2C,重点是设置I2C 的波特率,初始化完成以后开启I2C。第2 个函数是i2c_master_repeated_start,此函数用来发送一个重复开始信号,发送开始信号的时候也会顺带发送从设备地址。第3 个函数是i2c_master_start,此函数用于发送一个开始信号,发送开始信号
的时候也顺带发送从设备地址。第4 个函数是i2c_check_and_clear_error,此函数用于检查并清除错误。第5 个函数是i2c_master_stop,用于产生一个停止信号。第6 和第7 个函数分别为i2c_master_write 和i2c_master_read,这两个函数分别用于完成向I2C 从设备写数据和从I2C 从设备读数据。最后一个函数是i2c_master_transfer,此函数就是用户最终调用的,用于完成I2C
通信的函数,此函数会使用前面的函数拼凑出I2C 读/写时序。此函数就是按照26.1.1 小节讲解的I2C 读写时序来编写的。
I2C 的操作函数已经准备好了,接下来就是使用前面编写I2C 操作函数来配置AP3216C 了,配置完成以后就可以读取AP3216C 里面的传感器数据,在bsp_ap3216c.h 输入如下所示内容:
3 /***************************************************************
4 Copyright © zuozhongkai Co., Ltd. 1998-2019. All rights reserved.
5 文件名: bsp_ap3216c.h
6 作者: 左忠凯
7 版本: V1.0
8 描述: AP3216C驱动头文件。
9 其他: 无
10 论坛: www.openedv.com
11 日志: 初版V1.0 2019/3/26 左忠凯创建
12 ***************************************************************/
13 #include "imx6ul.h"
14
15 #define AP3216C_ADDR 0X1E /* AP3216C器件地址*/
16
17 /* AP3316C寄存器*/
18 #define AP3216C_SYSTEMCONG 0x00 /* 配置寄存器*/
19 #define AP3216C_INTSTATUS 0X01 /* 中断状态寄存器*/
20 #define AP3216C_INTCLEAR 0X02 /* 中断清除寄存器*/
21 #define AP3216C_IRDATALOW 0x0A /* IR数据低字节*/
22 #define AP3216C_IRDATAHIGH 0x0B /* IR数据高字节*/
23 #define AP3216C_ALSDATALOW 0x0C /* ALS数据低字节*/
24 #define AP3216C_ALSDATAHIGH 0X0D /* ALS数据高字节*/
25 #define AP3216C_PSDATALOW 0X0E /* PS数据低字节*/
26 #define AP3216C_PSDATAHIGH 0X0F /* PS数据高字节*/
27
28 /* 函数声明*/
29 unsigned char ap3216c_init(void);
30 unsigned char ap3216c_readonebyte(unsigned char addr,
unsigned char reg);
31 unsigned char ap3216c_writeonebyte(unsigned char addr,
unsigned char reg,
unsigned char data);
32 void ap3216c_readdata(unsigned short *ir, unsigned short *ps,
unsigned short *als);
33
34 #endif
第15 到26 行定义了一些宏,分别为AP3216C 的设备地址和寄存器地址,剩下的就是函数声明。接下来在bsp_ap3216c.c 中输入如下所示内容:
版本: V1.0
描述: AP3216C驱动文件。
其他: 无
论坛: www.openedv.com
日志: 初版V1.0 2019/3/26 左忠凯创建
***************************************************************/
1 #include "bsp_ap3216c.h"
2 #include "bsp_i2c.h"
3 #include "bsp_delay.h"
4 #include "cc.h"
5 #include "stdio.h"
6
7 /*
8 * @description : 初始化AP3216C
9 * @param : 无
10 * @return : 0 成功,其他值错误代码
11 */
12 unsigned char ap3216c_init(void)
13 {
14 unsigned char data = 0;
15
16 /* 1、IO初始化,配置I2C IO属性
17 * I2C1_SCL -> UART4_TXD
18 * I2C1_SDA -> UART4_RXD
19 */
20 IOMUXC_SetPinMux(IOMUXC_UART4_TX_DATA_I2C1_SCL, 1);
21 IOMUXC_SetPinMux(IOMUXC_UART4_RX_DATA_I2C1_SDA, 1);
22 IOMUXC_SetPinConfig(IOMUXC_UART4_TX_DATA_I2C1_SCL, 0x70B0);
23 IOMUXC_SetPinConfig(IOMUXC_UART4_RX_DATA_I2C1_SDA, 0X70B0);
24
25 /* 2、初始化I2C1 */
26 i2c_init(I2C1);
27
28 /* 3、初始化AP3216C */
29 /* 复位AP3216C */
30 ap3216c_writeonebyte(AP3216C_ADDR, AP3216C_SYSTEMCONG, 0X04);
31 delayms(50); /* AP33216C复位至少10ms */
32
33 /* 开启ALS、PS+IR */
34 ap3216c_writeonebyte(AP3216C_ADDR, AP3216C_SYSTEMCONG, 0X03);
35
36 /* 读取刚刚写进去的0X03 */
37 data = ap3216c_readonebyte(AP3216C_ADDR, AP3216C_SYSTEMCONG);
38 if(data == 0X03)
39 return 0; /* AP3216C正常*/
40 else
41 return 1; /* AP3216C失败*/
42 }
43
44 /*
45 * @description : 向AP3216C写入数据
46 * @param – addr : 设备地址
47 * @param - reg : 要写入的寄存器
48 * @param – data : 要写入的数据
49 * @return : 操作结果
50 */
51 unsigned char ap3216c_writeonebyte(unsigned char addr,
unsigned char reg,
unsigned char data)
52 {
53 unsigned char status=0;
54 unsigned char writedata=data;
55 struct i2c_transfer masterXfer;
56
57 /* 配置I2C xfer结构体*/
58 masterXfer.slaveAddress = addr; /* 设备地址*/
59 masterXfer.direction = kI2C_Write; /* 写入数据*/
60 masterXfer.subaddress = reg; /* 要写入的寄存器地址*/
61 masterXfer.subaddressSize = 1; /* 地址长度一个字节*/
62 masterXfer.data = &writedata; /* 要写入的数据*/
63 masterXfer.dataSize = 1; /* 写入数据长度1个字节*/
64
65 if(i2c_master_transfer(I2C1, &masterXfer))
66 status=1;
67
68 return status;
69 }
70
71 /*
72 * @description : 从AP3216C读取一个字节的数据
73 * @param – addr : 设备地址
74 * @param - reg : 要读取的寄存器
75 * @return : 读取到的数据。
76 */
77 unsigned char ap3216c_readonebyte(unsigned char addr,
unsigned char reg)
78 {
79 unsigned char val=0;
80
81 struct i2c_transfer masterXfer;
82 masterXfer.slaveAddress = addr; /* 设备地址*/
83 masterXfer.direction = kI2C_Read; /* 读取数据*/
84 masterXfer.subaddress = reg; /* 要读取的寄存器地址*/
85 masterXfer.subaddressSize = 1; /* 地址长度一个字节*/
86 masterXfer.data = &val; /* 接收数据缓冲区*/
87 masterXfer.dataSize = 1; /* 读取数据长度1个字节*/
88 i2c_master_transfer(I2C1, &masterXfer);
89
90 return val;
91 }
92
93 /*
94 * @description : 读取AP3216C的原始数据,包括ALS,PS和IR, 注意!如果
95 * :同时打开ALS,IR+PS两次数据读取的时间间隔要大于112.5ms
96 * @param - ir : ir数据
97 * @param - ps : ps数据
98 * @param - ps : als数据
99 * @return : 无。
100 */
101 void ap3216c_readdata(unsigned short *ir, unsigned short *ps, unsigned short *als)
102 {
103 unsigned char buf[6];
104 unsigned char i;
105
106 /* 循环读取所有传感器数据*/
107 for(i = 0; i < 6; i++)
108 {
109 buf[i] = ap3216c_readonebyte(AP3216C_ADDR,
AP3216C_IRDATALOW + i);
110 }
111
112 if(buf[0] & 0X80) /* IR_OF位为1,则数据无效*/
113 *ir = 0;
114 else /* 读取IR传感器的数据*/
115 *ir = ((unsigned short)buf[1] << 2) | (buf[0] & 0X03);
116
117 *als = ((unsigned short)buf[3] << 8) | buf[2];/* 读取ALS数据*/
118
119 if(buf[4] & 0x40) /* IR_OF位为1,则数据无效*/
120 *ps = 0;
121 else /* 读取PS传感器的数据*/
122 *ps = ((unsigned short)(buf[5] & 0X3F) << 4) |
(buf[4] & 0X0F);
123 }
文件bsp_ap3216c.c 里面共有4 个函数,第1 个函数是ap3216c_init,顾名思义,此函数用于初始化AP3216C,初始化成功的话返回0,如果初始化失败就返回其他值。此函数先初始化所使用到的IO,比如初始化I2C1 的相关IO,并设置其复用为I2C1。然后此函数会调用i2c_init来初始化I2C1,最后初始化AP3216C。第2 个和第3 个函数分别为ap3216c_writeonebyte 和
ap3216c_readonebyte,这两个函数分别是向AP3216C 写入数据和从AP3216C 读取数据。这两个函数都通过调用bsp_i2c.c 中的函数i2c_master_transfer 来完成对AP3216C 的读写。最后一个函数就是ap3216c_readdata,此函数用于读取AP3216C 中的ALS、PS 和IR 传感器数据。
最后在main.c 中输入如下代码:
/**************************************************************
Copyright © zuozhongkai Co., Ltd. 1998-2019. All rights reserved.
文件名: main.c
作者: 左忠凯
版本: V1.0
描述: I.MX6U开发板裸机实验18 IIC实验
其他: IIC是最常用的接口,ALPHA开发板上有多个IIC外设,本实验就
来学习如何驱动I.MX6U的IIC接口,并且通过IIC接口读取板载
AP3216C的数据值。
论坛: www.openedv.com
日志: 初版V1.0 2019/1/15 左忠凯创建
**************************************************************/
1 #include "bsp_clk.h"
2 #include "bsp_delay.h"
3 #include "bsp_led.h"
4 #include "bsp_beep.h"
5 #include "bsp_key.h"
6 #include "bsp_int.h"
7 #include "bsp_uart.h"
8 #include "bsp_lcd.h"
9 #include "bsp_rtc.h"
10 #include "bsp_ap3216c.h"
11 #include "stdio.h"
12
13 /*
14 * @description : main函数
15 * @param : 无
16 * @return : 无
17 */
18 int main(void)
19 {
20 unsigned short ir, als, ps;
21 unsigned char state = OFF;
22
23 int_init(); /* 初始化中断(一定要最先调用!) */
24 imx6u_clkinit(); /* 初始化系统时钟*/
25 delay_init(); /* 初始化延时*/
26 clk_enable(); /* 使能所有的时钟*/
27 led_init(); /* 初始化led */
28 beep_init(); /* 初始化beep */
29 uart_init(); /* 初始化串口,波特率115200 */
30 lcd_init(); /* 初始化LCD */
31
32 tftlcd_dev.forecolor = LCD_RED;
33 lcd_show_string(30, 50, 200, 16, 16,
(char*)"ALPHA-IMX6U IIC TEST");
34 lcd_show_string(30, 70, 200, 16, 16, (char*)"AP3216C TEST");
35 lcd_show_string(30, 90, 200, 16, 16, (char*)"ATOM@ALIENTEK");
36 lcd_show_string(30, 110, 200, 16, 16, (char*)"2019/3/26");
37
38 while(ap3216c_init()) /* 检测不到AP3216C */
39 {
40 lcd_show_string(30, 130, 200, 16, 16,
(char*)"AP3216C Check Failed!");
41 delayms(500);
42 lcd_show_string(30, 130, 200, 16, 16,
(char*)"Please Check! ");
43 delayms(500);
44 }
45
46 lcd_show_string(30, 130, 200, 16, 16, (char*)"AP3216C Ready!");
47 lcd_show_string(30, 160, 200, 16, 16, (char*)" IR:");
48 lcd_show_string(30, 180, 200, 16, 16, (char*)" PS:");
49 lcd_show_string(30, 200, 200, 16, 16, (char*)"ALS:");
50 tftlcd_dev.forecolor = LCD_BLUE;
51 while(1)
52 {
53 ap3216c_readdata(&ir, &ps, &als); /* 读取数据*/
54 lcd_shownum(30 + 32, 160, ir, 5, 16); /* 显示IR数据*/
55 lcd_shownum(30 + 32, 180, ps, 5, 16); /* 显示PS数据*/
56 lcd_shownum(30 + 32, 200, als, 5, 16); /* 显示ALS数据*/
57 delayms(120);
58 state = !state;
59 led_switch(LED0,state);
60 }
61 return 0;
62 }
第38 行调用ap3216c_init 来初始化AP3216C,如果AP3216C 初始化失败的话就会进入循环,会在LCD 上不断的闪烁字符串“AP3216C Check Failed!”和“Please Check!”,直到AP3216C初始化成功。
第53 行调用函数ap3216c_readdata 来获取AP3216C 的ALS、PS 和IR 传感器数据值,获取完成以后就会在LCD 上显示出来。
文件main.c 里面的内容总体上还是很简单的,实验程序的编写就到这里。
编译下载验证
编写Makefile 和链接脚本
修改Makefile 中的TARGET 为ap3216c,然后在在INCDIRS 和SRCDIRS 中加入“bsp/i2c”和“bsp/ap3216c”,修改后的Makefile 如下:
示例代码26.4.1.1 Makefile 文件代码
1 CROSS_COMPILE ?= arm-linux-gnueabihf-
2 TARGET ?= ap3216c
3
4 /* 省略掉其它代码...... */
5
6 INCDIRS := imx6ul \
7 stdio/include \
8 bsp/clk \
9 bsp/led \
10 bsp/delay \
11 bsp/beep \
12 bsp/gpio \
13 bsp/key \
14 bsp/exit \
15 bsp/int \
16 bsp/epittimer \
17 bsp/keyfilter \
18 bsp/uart \
19 bsp/lcd \
20 bsp/rtc \
21 bsp/i2c \
22 bsp/ap3216c
23
24 SRCDIRS := project \
25 stdio/lib \
26 bsp/clk \
27 bsp/led \
28 bsp/delay \
29 bsp/beep \
30 bsp/gpio \
31 bsp/key \
32 bsp/exit \
33 bsp/int \
34 bsp/epittimer \
35 bsp/keyfilter \
36 bsp/uart \
37 bsp/lcd \
38 bsp/rtc \
39 bsp/i2c \
40 bsp/ap3216c
41
42 /* 省略掉其它代码...... */
43
44 clean:
45 rm -rf $(TARGET).elf $(TARGET).dis $(TARGET).bin $(COBJS) $(SOBJS)
第2 行修改变量TARGET 为“ap3216c”,也就是目标名称为“ap3216c”。
第21 和22 行在变量INCDIRS 中添加I2C 和AP3216C 的驱动头文件(.h)路径。
第39 和40 行在变量SRCDIRS 中添加I2C 和AP3216C 驱动文件(.c)路径。
链接脚本保持不变。
编译下载
使用Make 命令编译代码,编译成功以后使用软件imxdownload 将编译完成的ap3216c.bin文件下载到SD 卡中,命令如下:
chmod 777 imxdownload //给予imxdownload 可执行权限,一次即可
./imxdownload ap3216c.bin /dev/sdd //烧写到SD 卡中,不能烧写到/dev/sda 或sda1 里面!
烧写成功以后将SD 卡插到开发板的SD 卡槽中,然后复位开发板。程序运行以后LCD界面如图26.4.2.1 所示:

图26.4.2.1 LCD 显示界面
图26.4.2.1 中显示出了AP3216C 的三个传感器的数据,大家可以用手遮住或者靠近AP3216C,LCD 上的三个数据就会变化。
















 7313
7313











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











