







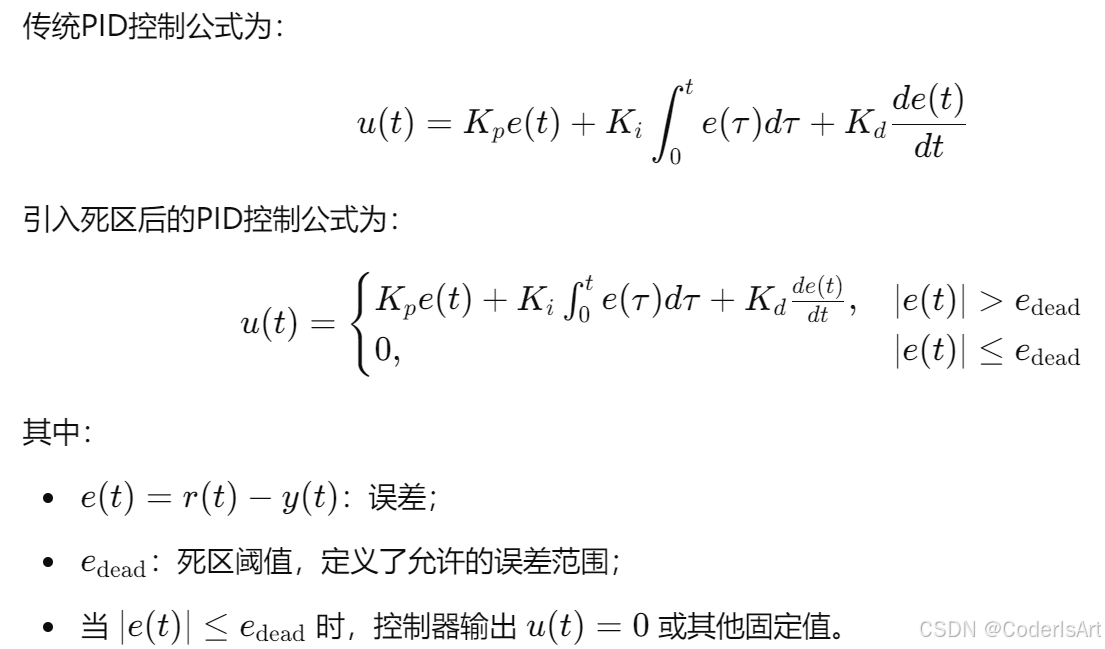
带死区的PID控制是一种在传统PID控制算法的基础上加入“死区处理”机制的改进方法。死区用于设定一个小的误差范围,在此范围内,控制器不进行动作或保持某一固定输出值,从而避免在误差较小时频繁调整系统输出。这种方法可以减少控制器的振荡和能量消耗,特别适用于对微小误差不敏感的场景。
带死区PID控制原理
设计步骤
-
确定控制目标和死区范围
- 根据控制对象的特性,确定允许的误差范围 edeade_{\text{dead}}edead。例如,对于温度控制,允许 ±0.5°C 的误差。
-
调整 PID 参数
- 先不考虑死区,使用标准方法调整 KpK_pKp、KiK_iKi、KdK_dKd 参数,确保系统能够正常工作。
- 引入死区后,根据实际运行情况微调参数。
-
实现死区逻辑
- 在控制算法中加入判断逻辑,当 ∣e(t)∣≤edead|e(t)| \leq e_{\text{dead}}∣e(t)∣≤edead 时,控制器输出保持为零或某一固定值。
伪代码实现
以下是带死区PID控制的伪代码实现:
class PIDWithDeadZone:
def __init__(self, Kp, Ki, Kd, dead_zone, dt):
self.Kp = Kp
self.Ki = Ki
self.Kd = Kd
self.dead_zone = dead_zone # 死区阈值
self.dt = dt # 时间步长
self.integral = 0 # 积分项
self.prev_error = 0 # 上一次误差
def compute(self, setpoint, output):
# 计算误差
error = setpoint - output
# 死区判断
if abs(error) <= self.dead_zone:
return 0 # 输出为0(或者其他固定值)
# 比例项
P = self.Kp * error
# 积分项
self.integral += error * self.dt
I = self.Ki * self.integral
# 微分项
derivative = (error - self.prev_error) / self.dt
D = self.Kd * derivative
# 更新上一次误差
self.prev_error = error
# 控制输出
return P + I + D
参数调整
-
死区范围 (edeade_{\text{dead}}edead)
- 如果死区范围太小,控制器容易频繁动作;
- 如果死区范围太大,可能导致控制精度下降;
- 根据系统特性和对误差的容忍度选择适当的死区范围。
-
PID 参数 (KpK_pKp, KiK_iKi, KdK_dKd)
- KpK_pKp:影响系统响应速度,通常较小的 KpK_pKp 更适合带死区的控制;
- KiK_iKi:消除稳态误差,适度调整以避免积分项在死区外累积过大;
- KdK_dKd:改善动态性能,但要避免过高引入震荡。
优点与缺点
优点
- 减少振荡和抖动:
- 当误差较小时,死区防止控制器频繁调整输出,尤其对高灵敏度系统有效。
- 降低能耗:
- 在死区范围内,控制器不动作,减少功率消耗。
- 提高系统寿命:
- 减少执行机构的动作频率(如阀门、伺服电机)。
缺点
- 引入稳态误差:
- 死区内的误差无法消除,适用于对高精度要求不高的系统。
- 动态性能下降:
- 在接近死区边界时,系统响应可能变慢。
适用场景
- 温控系统:
- 如空调或恒温箱,允许一定温差范围内的波动。
- 位置控制系统:
- 如伺服电机控制,避免在目标位置附近的反复振荡。
- 低精度需求的场景:
- 如流量控制、水位控制,允许误差范围较大的系统。
改进与优化
- 动态死区:
- 根据误差变化率或系统状态动态调整死区大小。例如,快速变化时减小死区,稳态时增大死区。
- 结合模糊控制:
- 用模糊逻辑动态调整死区范围,进一步提高适应性。
- 固定输出值:
- 在死区范围内输出一个固定值(非零),适合需要维持某些运行状态的场景。
总结
带死区的PID控制是一种在允许误差范围内优化系统性能的有效方法。它通过减少控制动作频率,降低能耗和系统抖动,适用于对精度要求不高且具有一定允许误差的控制场景。通过合理设置死区范围和优化PID参数,能实现高效而稳定的控制效果。

















 1960
1960

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









