







1.可以使用Vuforia提供的手机扫描工具生成三维模型(od文件)。工具下载地址:https://developer.vuforia.com/downloads/tool


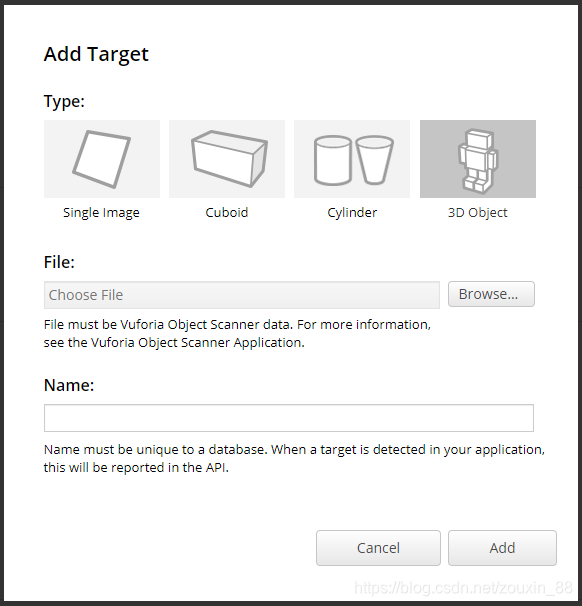
2.将模型上传到服务器,https://developer.vuforia.com/vui/develop/databases。
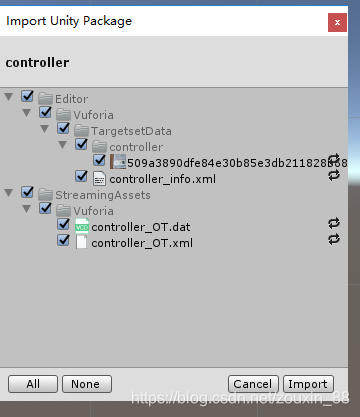
3.下载模型数据库unitypackage,将unitypackage导入到unity(这里以空调遥控器为例)。
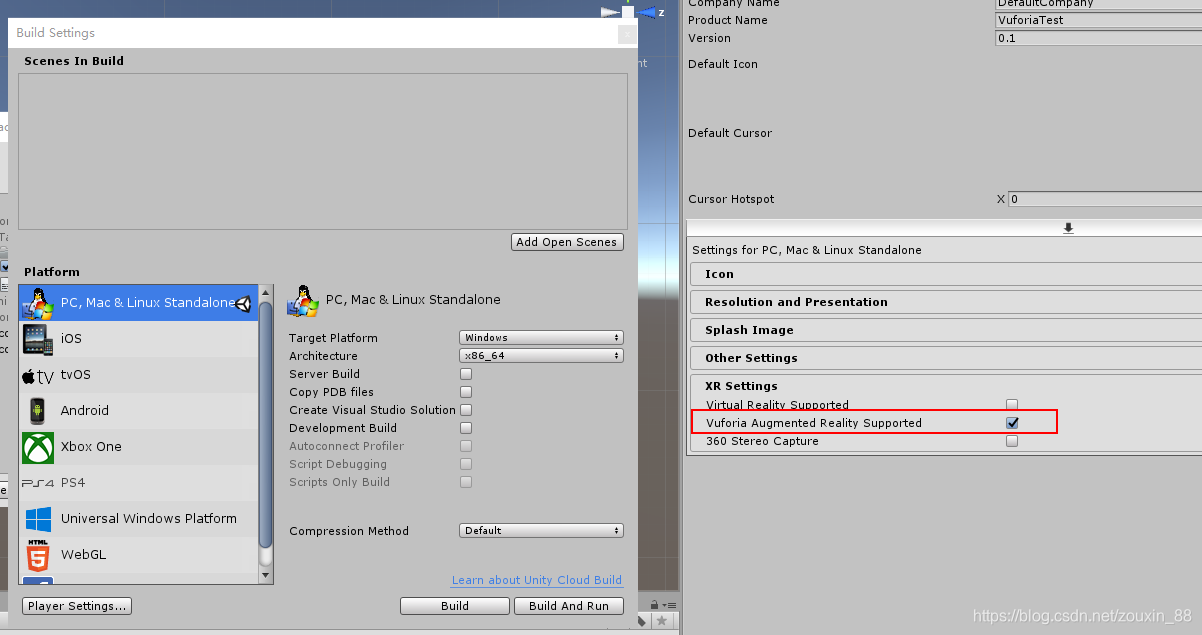
4.设置Unity支持Vuforia。
5.删掉场景中的相机,点击菜单【GameObject】【Vuforia Engine】【AR Camera】。
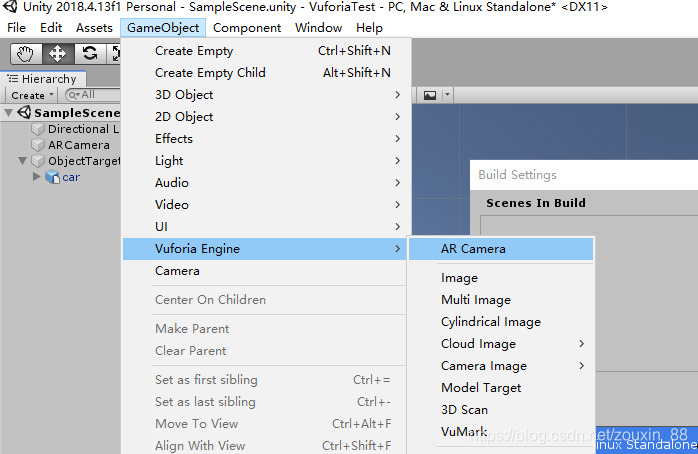
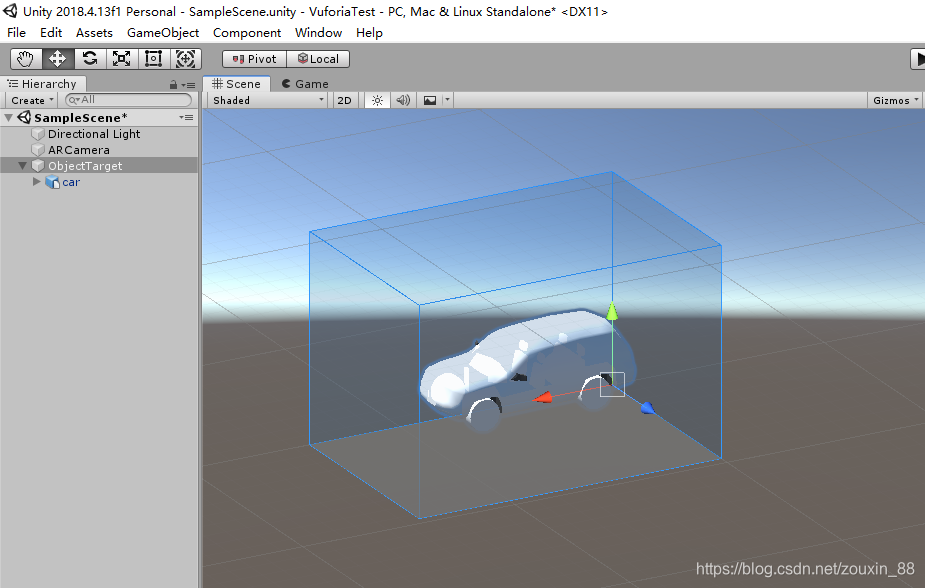
6.创建一个ObjectTarget,点击菜单【GameObject】【Vuforia Engine】【3D Scan】, 在Object Target Behaviour中设置要识别的三维模型。
7.在ObjectTarget添加识别成功后要显示的三维模型,比如显示一个车。
识别效果:



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









