






一.概要
什么是单片机看门狗
看门狗(WDT)是一个定时器,开启看门狗定时器之后(比如定时500ms),在单片机程序中每隔一定的时间(小于500ms)要“喂狗”一次,即将看门狗定时器清零。这样做的用处是,一旦单片机程序跑飞,没有在定时的时间之内去喂狗,那么定时达到500ms时,看门狗自动将单片机复位。
看门狗作用
看门狗的作用就是对单片机运行状态进行实时监测,监测单片机程序运行状态,防止程序跑飞,进入死循环。
看门狗原理
在系统运行以后,启动了看门狗的计数器,看门狗就开始自动计数; MCU正常工
作时,每隔一段时间输出一个信号到喂狗端,将WDT清零; 一旦单片机由于干扰造成程序跑飞后,而进入死循环状态时,在超过规定的时间内“喂狗”程序不能被执行,看门狗计数器就会溢出,从而引起看门狗中断,就会输出一个复位信号到MCU,造成系统复位。
在使用看门狗时,要注意适时喂狗。
看门狗分类
单片机的看门狗分为独立看门狗和窗口看门狗
独立看门狗(IWDG),顾名思义,就是独立的一个看门狗,由其专用低速时钟 (LSI) 驱动,因此,即便在主时钟发生故障时仍然保持工作状态。IWDG 最适合应用于那些需要看门狗作为一个在主程序之外,能够完全独立工作,并且对时间精度要求较低的场合。
窗口看门狗(WWDG),之所以称为窗口,是因为其喂狗时间是一个有上下限的范围内,你可以通过设定相关寄存器,设定其上限时间和下限时间:喂狗的时间不能过早也不能过晚。
二.独立看门狗介绍
1.独立看门狗基本介绍
独立看门狗(IWDG)由专用的低速时钟(LSI)驱动,即使主时钟发生故障它也仍然有效,一旦启动独立看门狗,就不能停止(LSI也不能被禁止)。看门狗被激活后,则在计数器计数至0x000时产生复位,在电源稳定期间,即使系统进入STOP和STANDBY模式,独立看门狗复位能将系统从STANDBY模式唤醒。
我们平时用的比较多的就是IWDG。
2.独立看门狗功能描述
在寄存器(IWDG_KR)中写入0xCCCC,开始启用独立看门狗;此时计数器开始从其复位值0xFFF递减计数。当计数器计数到末尾0x000时,会产生一个复位信号(IWDG_RESET)。
无论何时,只要在寄存器IWDG_KR中写入0xAAAA, IWDG_RLR中的值就会被重新加载到计数器,从而避免产生看门狗复位 。

3.独立看门狗复位时间
根据IWDG_PR和IWDG_RLR寄存器,可以配置看门狗产生复位的时间,复位时间见下图:

通过以上所知,通过配置IWDG_PR和IWDG_RLR两个寄存器,就能管理看门狗的复位时间。比如我们是预分频系数是64,IWDG_RLR寄存器是4095,复位时间大约就是6553ms,在这个时间内不向寄存器IWDG_KR中写入0xAAAA,单片机就会复位。
三.CubeMX配置一个独立看门狗IWDG例程
STLINK接STM32F103C8T6小系统板,STLINK接电脑USB口。

打开STM32CubeMX软件,新建工程

Part Number处输入STM32F103C8,再双击就创建新的工程

配置下载口引脚

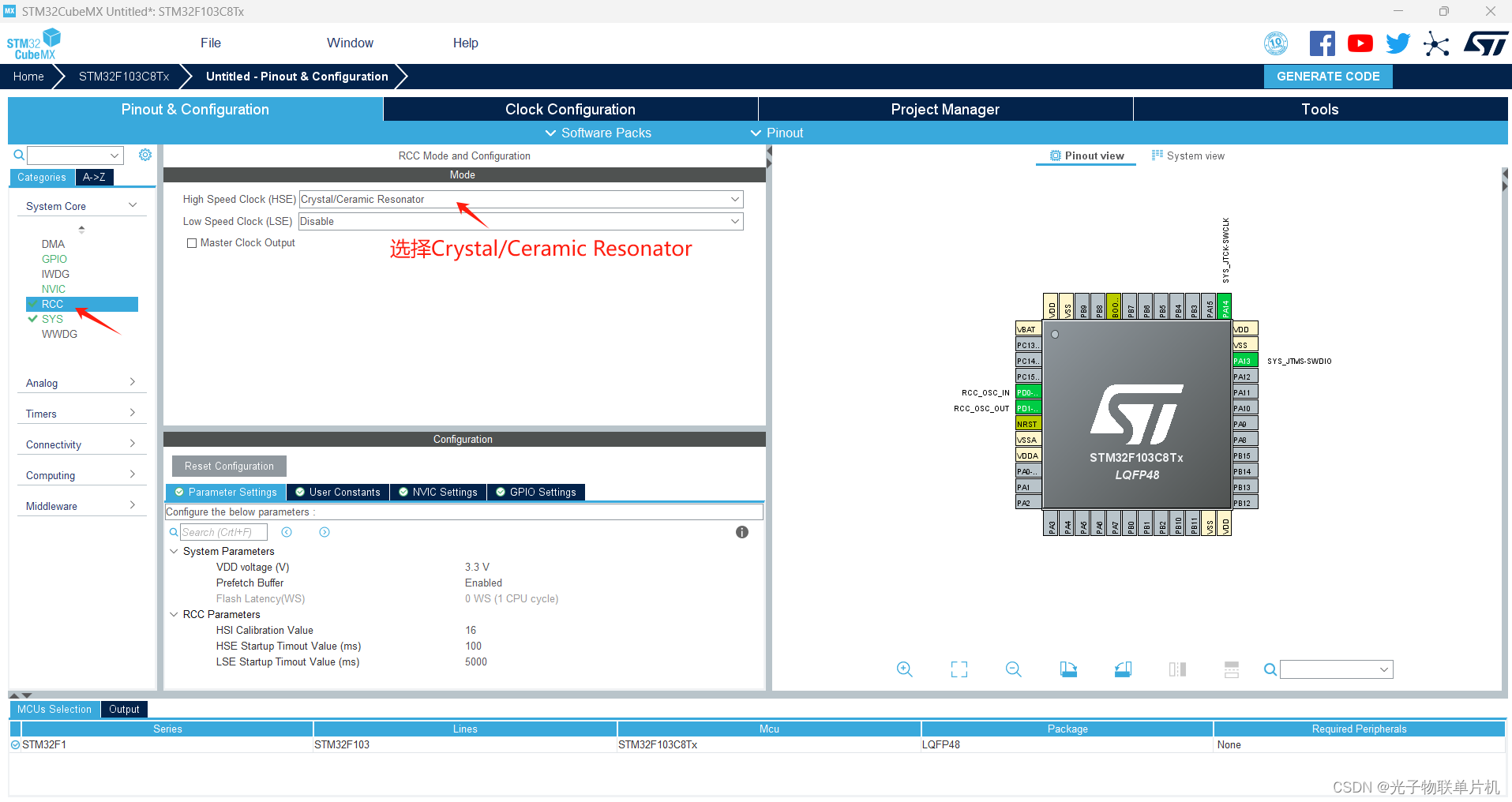
配置外部晶振引脚,配置外部高频晶振引脚
PC13配置成输出

独立看门狗配置

配置系统主频

配置工程文件名,保存路径,KEIL5工程输出方式

生成工程

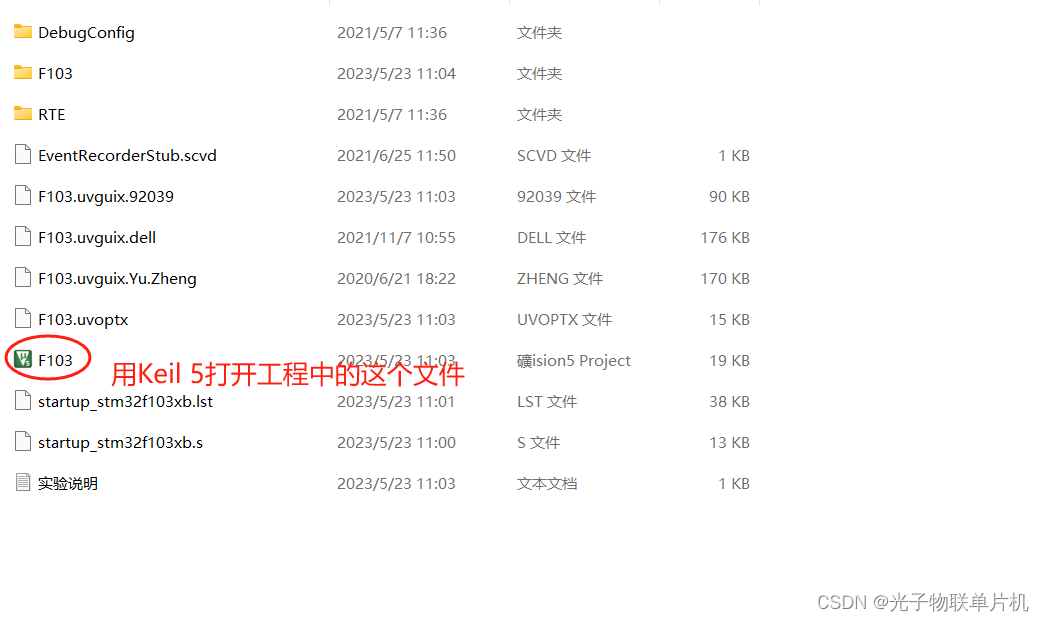
用Keil5打开工程
添加代码

uint32_t Timecouter;//定义时间计数
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
HAL_Delay(5000);//等待5秒
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_IWDG_Init();//独立看门狗初始化
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13);//PC13翻转输出
HAL_Delay(100);//等待100ms
if(Timecouter<100)//判断计数是否小于100
{
if(HAL_IWDG_Refresh(&hiwdg) != HAL_OK)//喂狗
{
}
}
Timecouter++;
}
/* USER CODE END 3 */
}
#define IWDG_KEY_RELOAD 0x0000AAAAu /*!< IWDG Reload Counter Enable */
#define IWDG_KEY_ENABLE 0x0000CCCCu /*!< IWDG Peripheral Enable */
#define IWDG_KEY_WRITE_ACCESS_ENABLE 0x00005555u /*!< IWDG KR Write Access Enable */
#define IWDG_KEY_WRITE_ACCESS_DISABLE 0x00000000u /*!< IWDG KR Write Access Disable */
#define __HAL_IWDG_RELOAD_COUNTER(__HANDLE__) WRITE_REG((__HANDLE__)->Instance->KR, IWDG_KEY_RELOAD)
HAL_StatusTypeDef HAL_IWDG_Refresh(IWDG_HandleTypeDef *hiwdg)
{
/* Reload IWDG counter with value defined in the reload register */
__HAL_IWDG_RELOAD_COUNTER(hiwdg);
/* Return function status */
return HAL_OK;
}
实验效果

可以看到单片机是在大概运行16700ms时间单片机复位,根据代码,单片机是在运行10000ms之后就不喂狗,根据参数的配置,预分频系数是64,IWDG_RLR寄存器是4095,理论看门狗复位时间大约就是6.55s,由于我们实际测试计数时间最小单位是100ms,从不喂狗开始计时,我们大概计数到6.7s时间单片机复位,复位时间基本吻合。

四.CubeMX工程源代码下载
通过百度网盘分享的文件:27.IWDG独立看门狗实验.rar
链接:https://pan.baidu.com/s/1U7kO5jaI2kMXXDAZCQCQcQ
提取码:zw00
如果链接失效,可以联系博主给最新链接
程序下载下来之后解压就行
五.小结
IWDG特别适用于需要高可靠性的应用,如工业控制、医疗设备等,在这些应用中,系统的稳定性和可靠性至关重要。















 378
378

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









