







 该博客探讨了2D SLAM中地图访问部分的双线性线性插补方法。在SLAM系统中,地图采样点位于规则网格上,论文通过双线性插值来估算未知点的值及其梯度。线性插值沿着x和y轴分别进行,结合两者的结果即为双线性插值,用于计算离散点之间的连续性。
该博客探讨了2D SLAM中地图访问部分的双线性线性插补方法。在SLAM系统中,地图采样点位于规则网格上,论文通过双线性插值来估算未知点的值及其梯度。线性插值沿着x和y轴分别进行,结合两者的结果即为双线性插值,用于计算离散点之间的连续性。
IV. 2D SLAM
A. Map Access
It should be noted that the sample points/grid cells of the map are
situated on a regular grid with distance 1 (in map coordinates) from
each other, which simplifies the presented equations for the gradient
approximation.——A Flexible and Scalable SLAM System with Full 3D
Motion Estimation
论文中提到采样点位于距离1的规则格网之中(地图坐标),他们是相互分离的,是离散分布的。那么这些采样点之间的点的值我们要如何得到呢?
论文中使用的方法是双线性线性插值。
要解释双线性线性插补,先要解释线性插值:
1.线性插值
已知点A的坐标 (x0, y0) 与点B的坐标 (x1, y1),现在要得到 [x0, x1] 区间内一点C的值,C的横坐标为 x。
那么我们就有:
由于 x 值已知,所以可以从公式得到 y 的值
。
这是C点在A,B线上的情况。但如果C不在A,B线上我们就需要使用双线性插值。就比如论文中提到的。
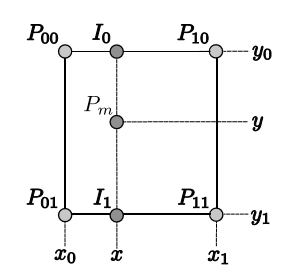
fig.2 a
Given a continuous map coordinate Pm, the occupancy value M(Pm) as well
as the gradient ∇M(Pm) = ∂M/∂x (Pm), ∂M/∂y (Pm)can be approximated
by using the four closest integer coordinates P00..11 as depicted in
Fig. 2(a). Linear interpolation along the x- and y-axis then yields
这里说想得到M(Pm)的值以及他的偏导∇M(Pm) = ∂M/∂x (Pm), ∂M/∂y (Pm)
2.双线性插值
双线性插值,就是两个方向的线性插值加
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1037
1037

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









