




对于这样一张有向图:
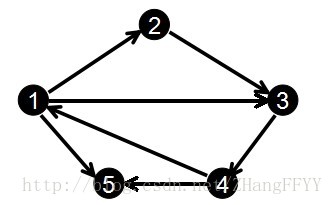
输入边的顺序如下:
1 2
2 3
3 4
1 3
4 1
1 5
4 5
对于邻接表来说是这样的:
1 -> 2 -> 3 -> 5
2 -> 3
3 -> 4
4 -> 1 -> 5
5 ->^
对于链式前向星来说是这样的:
edge[0].to = 2; edge[0].next = -1; head[1] = 0;
edge[1].to = 3; edge[1].next = -1; head[2] = 1;
edge[2].to = 4; edge[2],next = -1; head[3] = 2;
edge[3].to = 3; edge[3].next = 0; head[1] = 3;
edge[4].to = 1; edge[4].next = -1; head[4] = 4;
edge[5].to = 5; edge[5].next = 3; head[1] = 5;
edge[6].to = 5; edge[6].next = 4; head[4] = 6;
(以起点为1举例):
head[1] = 5 (以1为起点的第一条边的位置) -> edge[5].to = 5 (终点) -> edge[5].next = 3(同一起点下一条边的位置) ->edge[3].to = 3(第二条边的终点) -> edge[3].next = 0 -> edge[0].to = 2(第三条边的终点) ->edge[0].next = -1 (没下一条边)
简化来说就是:
1 -> 5 -> 3 -> 2
可以看到链式前向星和邻接表除了顺序不一样,其他的可以说是一样的。
看一下链式前向星的代码:
const int maxn = 10005; //点的最大个数
int head[maxn], cnt=0;//head用来表示以i为起点的第一条边存储的位置,cnt读入边的计数器
struct Edge
{
int next; //同一起点的上一条边的储存位置
int to; //第i条边的终点
int w; //第i条边权重
};
Edge edge[maxn];
void add(int u,int v,int w) //读入边
{
edge[cnt].w = w;
edge[cnt].to = v;
edge[cnt].next = head[u];
head[u] = cnt++;
}
void read() //遍历所有边
{
for(int i=0; i<=n; i++)
for(int j=head[i]; j!=-1; j=edge[j].next)
}我觉得链式前向星和邻接表的思想是一样的,区别就是:邻接表是用链表实现的,可以动态的增加边,
而链式前向星是用结构体数组实现的,是静态的,需要一开始知道数据范围,开好数组大小。
相比之下,邻接表灵活,链式前向星好写。
如有理解不对的地方,希望可以告诉我。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









