 边框回归详解
边框回归详解





 本文深入探讨了目标检测中边框回归的基本原理,解释了为何需要进行边框回归以提高检测精度,并详细介绍了线性回归在边框微调中的应用。
本文深入探讨了目标检测中边框回归的基本原理,解释了为何需要进行边框回归以提高检测精度,并详细介绍了线性回归在边框微调中的应用。
原文转载于:http://blog.csdn.net/elaine_bao/article/details/60469036
一、前言
一些目标检测算法如R-CNN、Fast RCNN中都用到了bounding box回归,回归的目标是使得预测的
物体窗口向groundtruth窗口相接近
二、做边框回归的原因

如上图所示,绿色的框为飞机的Ground Truth,红色的框是提取的Region Proposal。那么即便红色
的框被分类器识别为飞机,但是由于红色的框定位不准(IoU<0.5),那么这张图相当于没有正确的检测出
飞机。如果我们能对红色的框进行微调,使得经过微调后的窗口跟Ground Truth更接近,这样岂不是定
位会更准确。确实,Bounding-box regression 就是用来微调这个窗口的。
三、回归/微调的对象
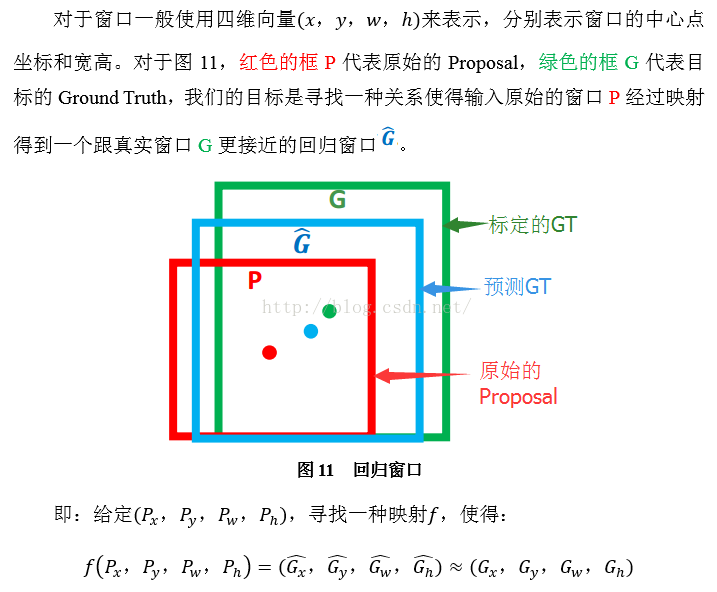
四、3. Bounding-box regression(边框回归)
从边框

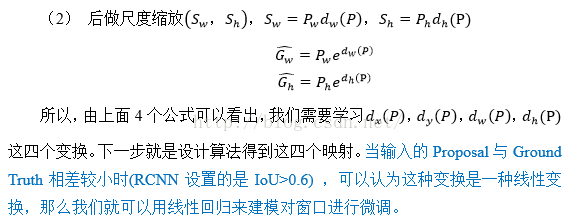
注意:只有当Proposal和Ground Truth比较接近时(线性问题),我们才能将其作为训练样本训练
我们的线性回归模型,否则会导致训练的回归模型不work(当Proposal跟GT离得较远,就是复杂的非线
性问题了,此时用线性回归建模显然不合理)。这个也是G-CNN: an Iterative Grid Based Object Detector
多次迭代实现目标准确定位的关键
线性回归就是给定输入的特征向量X,学习一组参数W,使得经过线性回归后的值跟真实值Y(Ground
Truth)非常接近。即

故使用线性回归学习

是边框的特征向量,即R-CNN中的Pool5feature(特征向量),

也就是每一个变换对应一个目标函数),
小,那真实的变换值是什么?这需要根据训练样本的输出边框和ground truth 边框得到,计算如下:

故要让
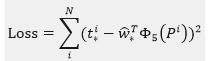
优化目标函数得:


















 2098
2098

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









