







问题:设ABC三点,形成三角形,求角平分线与AC的交点坐标(x', y')
方案:
1. 已知两点求直线方程:A(x1,y1), B(x2,y2),求直线Line(A-B)的一般直线方程
ax + by + c =0
设b=1,使用y=kx+n转换{-kx + y + (-n)=0;}
a=-(y2-y1)/(x2-x1)
c=-(x2y1-x1y2)/(x2-x1)
可以设b=(x2-x1), 则a=y1-y2, c=x1y2-x2y1,即
a=y1-y2
b=x2-x1
c=x1y2-x2y1
2. 点到线的距离公式 (ax'+by'+c) / 开根号(a1*a1+b1*b1)
直线:ax + by +c =0;
代入点坐标(x',y'),
a. 如果ax'+by'+c > 0 标示 在直线的上侧
a. 如果ax'+by'+c = 0 标示 在直线上
c. 如果ax'+by'+c = 0 标示 在直线的下侧
abs(ax'+by'+c) 越小,距离直线越近
3.已知角平分线与AC交点到角两端距离相等,设点为x', y',两端直线位AB:a1x+b1y+c1=0, BC:a2x+b2x+c2=0;
距离公式:
交点距离AB:a1x'+b1y'+c1 / 开根号(a1*a1+b1*b1) 根据直线方程:a1 = y1-y2; b1 = x2-x1; c1 = x1*y2-x2*y1;
交点距离BC:a2x'+b2y'+c2 / 开根号(a2*a2+b2*b2) 根据直线方程:a2 = y2-y3; b2 = x3-x2; c2 = x2*y3-x3*y2;
另外x',y'在AC上,满足AC直线方程: a3x+b3y+c3=0; 根据直线方程:a3 = y3-y1; b3 = x1-x3; c3 = x3*y1-x1*y3;
a3x'+b3y'+c3=0;
设m1 = 开根号(a1*a1+b1*b1), m2=开根号(a2*a2+b2*b2)
基于这些:最终求得x',y'坐标
y' =- (c3 + a3 * (c2*m1-c1*m2)/(a1*m2-a2*m1)) / (a3 * (b2*m1 - b1*m2)/(a1*m2-a2*m1) + b3);;
x' =-(b3*y' + c3)/a3;
上面的方法有一个缺陷:当AC水平时,a3 = 0,x'出现了无穷大,这种情况可以使用坐标变换,使AC不与横坐标水平解决!
4.2D坐标系旋转关系
为了便于表述和分析,我们从平面直角坐标系出发,坐标系O-XY和坐标系O'-X'Y'的关系如下图所示:
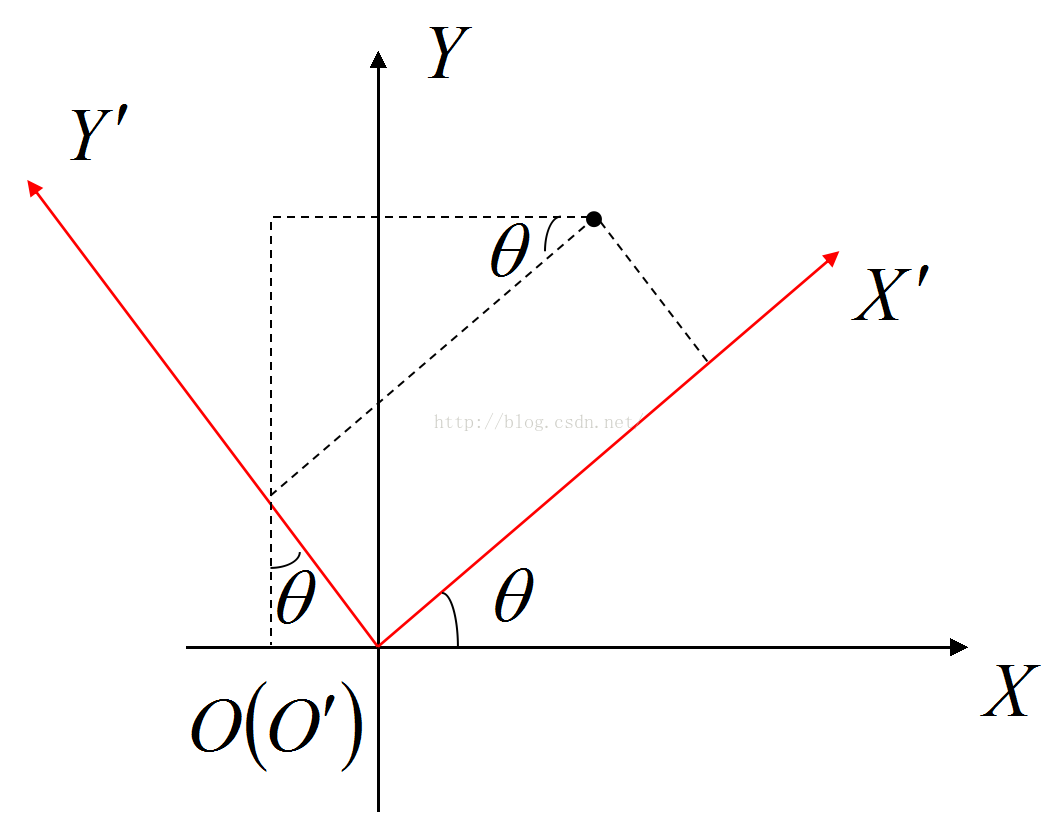
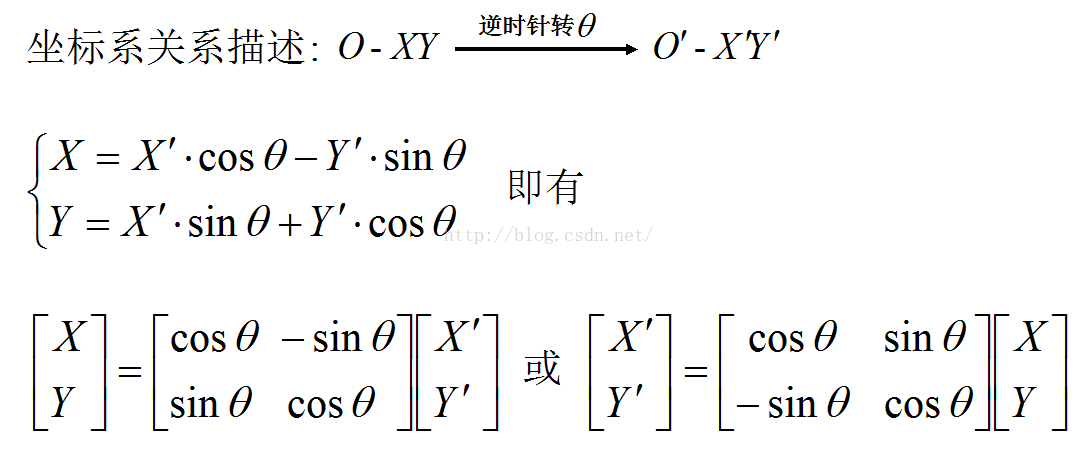
对于以上坐标关系,我们可以作如下描述:坐标系O-XY逆时针旋转theta(或顺时针旋转-theta)后与坐标系O'-X'Y'重合,或者坐标系O‘-X’Y‘顺时针旋转theta(或逆时针旋转-theta)后与坐标系O-XY重合。利用简单的之间三角形的余弦定理和正玄定理就可以得到以下公式(格式编辑不太熟,故以图像代替):
示例代码:
#include <iostream>
#include<cmath>
#include<iomanip>
#include <math.h>
using namespace std;
const double Pi = 3.14;
struct Point
{
double x;
double y;
Point(double x1 = 0, double y2 = 0) : x(x1), y(y2) {}
};
Point jiaodian(Point A, Point B, Point C)
{
bool flag = false;//作为标记,如果AC直线水平,则为真
/*
如果AC直线水平,将直角坐标系逆时针旋转45度
*/
if (C.y - A.y < 0.0001)
{
flag = true;
/*
将A坐标转换成旋转后的坐标
*/
Point temp = A;
A.x = temp.x * (cos(Pi / 4)) + temp.y * (sin(Pi / 4));
A.y = temp.x * (-sin(Pi / 4)) + temp.y * (cos(Pi / 4));
/*
将B坐标转换成旋转后的坐标
*/
temp = B;
B.x = temp.x * (cos(Pi / 4)) + temp.y * (sin(Pi / 4));
B.y = temp.x * (-sin(Pi / 4)) + temp.y * (cos(Pi / 4));
/*
将C坐标转换成旋转后的坐标
*/
temp = C;
C.x = temp.x * (cos(Pi / 4)) + temp.y * (sin(Pi / 4));
C.y = temp.x * (-sin(Pi / 4)) + temp.y * (cos(Pi / 4));
}
Point D;
/*
直线 AB:a1x + b1y + c1 = 0
*/
double a1 = A.y - B.y;
double b1 = B.x - A.x;
double c1 = A.x * B.y - B.x * A.y;
/*
直线 BC:a2x + b2y + c2 = 0
*/
double a2 = B.y - C.y;
double b2 = C.x - B.x;
double c2 = B.x * C.y - C.x * B.y;
/*
直线 AC:a3x + b3y + c3 = 0
*/
double a3 = C.y - A.y;
double b3 = A.x - C.x;
double c3 = C.x * A.y - A.x * C.y;
double m1 = sqrt(a1*a1 + b1*b1);
double m2 = sqrt(a2*a2 + b2*b2);
D.y = -(c3 + a3 * (c2*m1 - c1*m2) / (a1*m2 - a2*m1)) / (a3 * (b2*m1 - b1*m2) / (a1*m2 - a2*m1) + b3);
D.x = -(b3*D.y + c3)/a3;
/*
将D坐标转换回原来的坐标系
*/
if (flag == true)
{
Point temp = D;
D.x = temp.x * (cos(Pi / 4)) + temp.y * (-sin(Pi / 4));
D.y = temp.x * (sin(Pi / 4)) + temp.y * (cos(Pi / 4));
}
return D;
}
int main()
{
Point A(0, 0);
Point B(1, 1);
Point C(2, 0);
Point D = jiaodian(A, B, C);
cout << D.x << "," << D.y << endl;
return 0;
}













 818
818











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









