







 本文详细介绍3D程序的基础概念,包括3D流水线的工作原理及如何将3D模型转化为2D图像的过程。通过实例演示物体从局部坐标到世界坐标,再到相机坐标及最终的屏幕坐标的变换方法。
本文详细介绍3D程序的基础概念,包括3D流水线的工作原理及如何将3D模型转化为2D图像的过程。通过实例演示物体从局部坐标到世界坐标,再到相机坐标及最终的屏幕坐标的变换方法。
1. 数学分析
前面我们已经把预先想到的可能会用到的数学工具都封装好了,从这篇开始,应该很少出现一大篇都是数学推导的了,终于看见光明了,这次我们将开始第一个3D程序的编写,所以题目就叫Hello3DWorld吧。
0) 3D程序的本质
很多书都会先介绍“3D流水线”的词,但其实明白3D程序的人一下子就知道这是什么,而不了解的人看了这个词也没有意义。其实我也觉得没什么特殊意义,因为所有计算机程序都是一个一个流程执行下来的,不全都是某某流水线么。简单来说,3D流水线就是,从在计算机中表示三维世界的数据,到绘制到计算机2D屏幕上的整个过程。
3D流水线的子过程有很多,都列出来只能让人更迷惑,还是举个例子说个简单的情况吧:
(1) 首先,你的3D游戏什么也没有,只有一个空空的世界,它除了有X,Y,Z三个坐标以外,什么也没有。
(2) 你的手里有一个金字塔,如果在计算机中表示,则金字塔有自己的一套X,Y,Z坐标系,还有金字塔的四个尖端(顶点)在金字塔坐标系中的坐标。
(3) 你需要把金字塔放在游戏世界中,于是需要建立一个关系——金字塔坐标系中的原点,在游戏世界中的坐标是什么。
(4) 一旦这个关系找到了,就可以把金字塔的所有顶点都移动到游戏世界中去。
(5) 东西都放好了,怎么显示这个3D世界呢?不妨以我们自己来做例子,我们生活在三维世界中,我们看到的东西,就是要显示的东西。所以在游戏世界中,我们也需要一个类似眼睛的东西,我们管它叫另外一个名字——相机。
(6) 相机在游戏世界中,就好象我们人在现实世界中。人的位置不同、看的方向不同,那么眼睛里的景色也不同。所以,在游戏世界里,我们要给这个相机设置坐标,还有它的朝向,这样才能确定看到什么景色。
(7) 现在相机所看的是一个锥形的3D世界,锥形的尖的位置就是相机的坐标,锥形的底面积随着相机朝向的方向越来越大。
(8) 最后,我们把这个锥体内的景色都投影到一个2D平面上,并放在计算机屏幕上显示。
下面来对上面说的步骤分开详细说明。
1) 物体局部坐标->世界坐标
一张图足以说明:
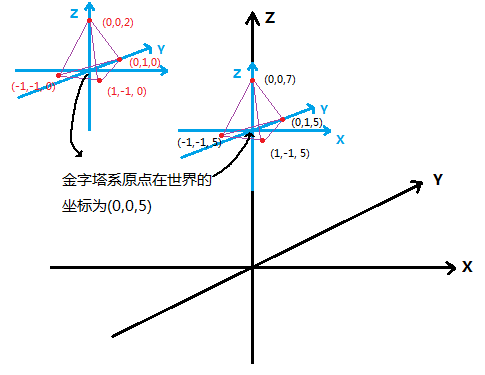
我们只要把物体的顶点的坐标的X,Y,Z都加上物体系原点在世界系下的坐标(0,0,5),就可以得到物体的各顶点在世界系下的坐标了。
2) 世界坐标->相机坐标
下图展示了上面所说的视景椎体和相机在游戏世界中的作用,注意该图是俯视2D图,方便理解。还有这个物体和上图的金字塔不是一回事,这是一个普遍的物体和相机,坐标都是很随意的,没有上面的那么特殊。
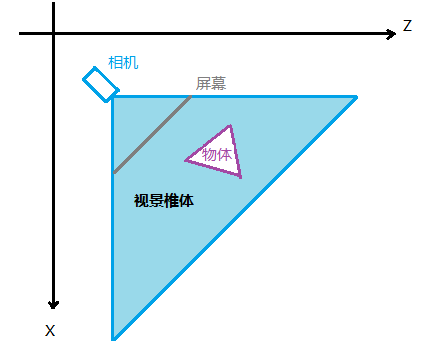
如上图,其实对于画在计算机屏幕上的目的而言,只有视景椎体内(屏幕后面的其实也没有用)的物体我们才关心,而且我们也实际上不关心物体在世界中的坐标,而只关心物体透视在屏幕上是什么坐标。这就引出了相机坐标系的概念,为了方便透视的运算,我们将建立相机坐标系,其中原点就是相机的位置,相机的朝向固定为正Z轴的方向,如下图:

这样,我们在做透视投影时如果知道了物体在相机坐标系下的坐标,透视运算将会非常的容易,这个下面会说到,现在我们先把物体挪过来吧。如下图所示,需要做两步操作:
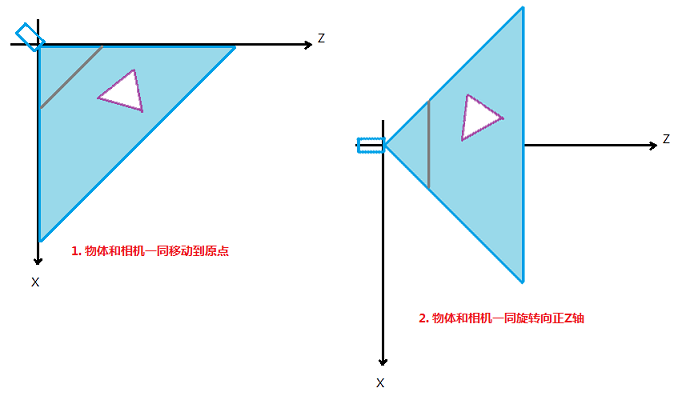
经过上述两部,物体的坐标就从世界坐标系转化到了相机坐标系中。这里要注意,我是将物体和相机一起移动到原点,这是因为要保持相机视景椎体内的景色不变,在相机移动到原点之后,相机在相机系的坐标就是(0,0,0),朝向就是正Z轴,所以对相机不需要运算。需要运算的只有物体的顶点坐标,要算两次,一次是平移,一次是旋转。
(1) 物体平移到相机系
很显然,相机移动了多少,物体就移动了多少。所以我们要求一个(dx, dy, dz),使得相机的坐标和这个(dx, dy, dz)相加为(0, 0, 0),这样,我们只需要把物体的坐标与这个(dx, dy, dz)相加,也就能求得物体在相机系下的坐标了。
我们设相机在世界系下的坐标为(cx, cy, cz),那么(dx, dy, dz)是多少呢?还用我说么。。。当然是(-cx, -cy, -cz)了。
所以,我们只要把物体在世界系下的坐标wx, wy, wz,分别减去相机在世界系下的坐标cx, cy, cz就好了,OK完成。
(2) 物体随相机旋转
说到这里有点郁闷,因为之前没有介绍向量与矩阵的转化和矩阵的几何意义,但在这个小节来做这个完整的推导只能让人更迷惑,所以对旋转矩阵的推导就作为下一篇的内容吧,这里先给出结果:
物体绕X、Y、Z轴分别旋转的变换矩阵:
Rx(theta) =
1 0 0
0 cos(theta) sin(theta)
0 -sin(theta) cos(theta)
Ry(theta) =
cos(theta) 0 -sin(theta)
0 1 0
sin(theta) 0 cos(theta)
Rz(theta) =
cos(theta) sin(theta) 0
-sin(theta) cos(theta) 0
0 0 1
只要用一个点向量乘以这个变换矩阵,得到的结果向量就是绕对应轴旋转theta度后的点向量了。
要注意的是,上面的矩阵都是物体旋转的矩阵,可是我们现在已知的是相机的朝向,所以在把物体转到相机系的过程中,物体顶点绕各个轴旋转的角度是和现在已知的相机朝向相反的,所以物体世界坐标->相机坐标的旋转过程要使用-theta代入到上面的矩阵中去才是正确的。
3) 透视投影
经过上面的操作,现在只差一步了,把视景椎体中的物体顶点透视投影到屏幕2D平面上来。其实特别简单,如下图:
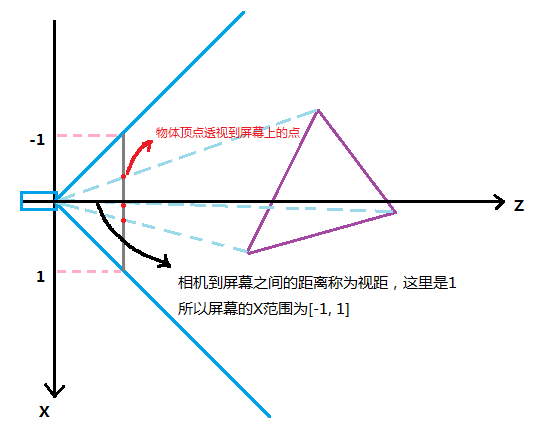
这里又是个俯视2D图,可以清楚的看到这个三角形的三个顶点是如何透视投影到屏幕上的。
下面的图则表明了透视后的点的X坐标怎么算:
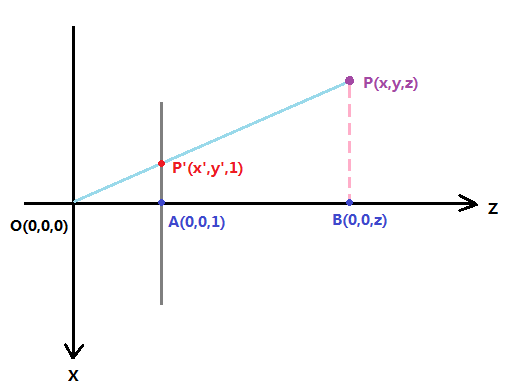
点P就是物体的某一个顶点,因为这个图是沿Y轴负方向俯视下来的,所以Y坐标在这里都无法显示,但因为Y与X的推导原理相同,所以只看这里的X,我们就可以得到结论。
投影后的点为P',所以所求的x'就是线段AP,根据相似三角形的原理,可以非常容易得出:
AP' : BP = OA : OB
所以AP' = OA * BP / OB
好了,我们把坐标代进来吧:
x' = 视距 * x / z
如果我们将视距设置为1,那么x' = x / z,简单吧,而且整个视野内的物体的X坐标都将在[-1 , 1]这个范围内。
同理,y' = y / z。
4) 屏幕变换
就差最后一步了,我们现在x的范围是[-1, 1],y的范围也是[-1, 1],但是计算机屏幕的分辨率是800 * 600 (随便举个例子),怎么转换呢?
先把负数去掉吧,我们给X和Y坐标都先加个1,于是范围就变成了[0, 2]了。
离终点很近了,我们再把X坐标乘以400,范围不就是[0, 800]了么。OK,X坐标解决了。
现在是Y坐标,你想把它乘以600?那你就想错了。还记得我们的相机拍下了什么吗?我们的相机拍出的照片是正方形的,但是现在你要把他完整的放在一个4:3的屏幕上,那里面的人不就被压扁了么?
这就和CCTV是一个道理,现在大家电视机都是16:9的,他还非要放4:3的视频源,现在看新闻,主持人全都是胖子了。
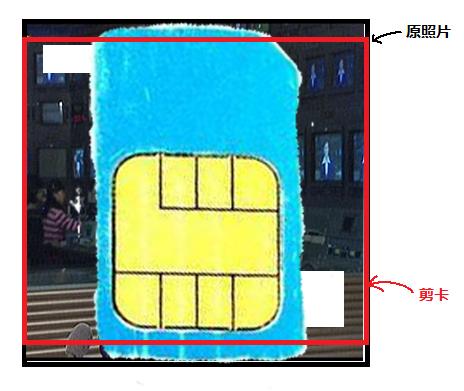
我们不能像他们一样愚蠢(开玩笑啦,CCTV也有自己的苦衷),所以我们要让Y坐标也放大400,这样的图像才是还原的照片。但是问题就来了,现在我们的图像是800 * 800,怎么显示在800 * 600的屏幕上呢?
中国移动给了我们一个好答案——剪卡!如果SIM卡装不进去IPHONE,我们就把它剪了。
那么我们不要上面的100和下面的100了,~~OK,这不就变成800 * 600了么。
看下图一看便知~:
其实有更好的方法解决这个问题,就是给相机分别定义垂直、水平的视野,这样投影屏幕就有了宽高比的概念,这个我想以后在封装相机操作的时候再优化了,现在我们先用这种最易理解的方式来吧:)
2. 代码实现
1) 首先,我们定义几个数据结构用来表示我们的金字塔。
我们都知道3D物体在计算机中是用一个个多边形来表示的,其实所说的多边形就是三角形,每个三角形都有三个顶点,但是如果用这些三角形来表示金字塔的的话,就是4个面×每个面的3个顶点,一共是12个顶点,然而实际呢?一个金字塔就只有4个顶点和4个三角形,这些三角形有共用顶点的情况存在,所以我们定义一个顶点数组来保存这4个顶点,并且每个三角形都有一个长度为3的整型数组来保存它自己的三个顶点的索引。
对于物体,需要保存组成该物体的POLY(三角形)的数组,还需要物体原点在世界系下的坐标:
您会发现我用了两个数组,我希望永远保留一份物体在执行变换前的局部顶点数据,如果只存一份的话,变换后将会覆盖掉,那么我们就无法根据最初的状态来执行其他变换了。
这里我还用了一个简单的相机结构来保存相机的世界坐标和朝向:
2) 现在写上面分析中介绍的那3步的三个函数,有了理论基础,实现总是那么随意而又简单:
3) 一个金字塔旋转的DEMO
有了上面的函数,我们可以构建一个金字塔,放置一个相机。先定义它们的数据存储:
在游戏初始化时,把他们的值设置好:
在游戏核心逻辑的地方,每次把角度转1度,当到了360度时,再变成0度,然后进行3个变换,生成屏幕坐标系下的4个顶点:
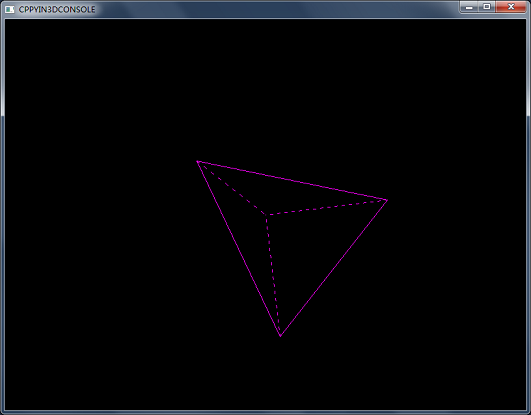
最后,把这4个点用之前我们写的Bresenham光栅化直线函数画出直线。这里我通过修改以前的函数写了一个画虚线的函数,然后把背面的三根直线画成了虚线:
OK,都完成了。
3. 源码下载
这次的DEMO截图如下:
完整项目下载地址:>>点击进入下载页<<
4. 补充内容
我们有太多的东西没有做了,主要有几个方面:
1) 从文件中读取3D数据,而不是我们手动来写。比如从3ds max的.3ds中读入数据。
2) 将世界中不在视景椎体中的物体移除掉,不对他们进行变换,浪费计算。
3) 视景椎体中太远和太近的东西,我们也不要。
4) 一半在椎体中,一半在锥体外的物体,我们要进行裁剪。
5) 我们的相机过于简单了,而且还有Gimbol lock问题,不过这个DEMO中可以达到要求了。
6) 光照处理
7) 消除背面没用的多边形
8) 贴图
……
太多了。
但不要着急,我们已经看到了第一个收获,一个可以随意修改的半成品线框渲染引擎和一个示例。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









