









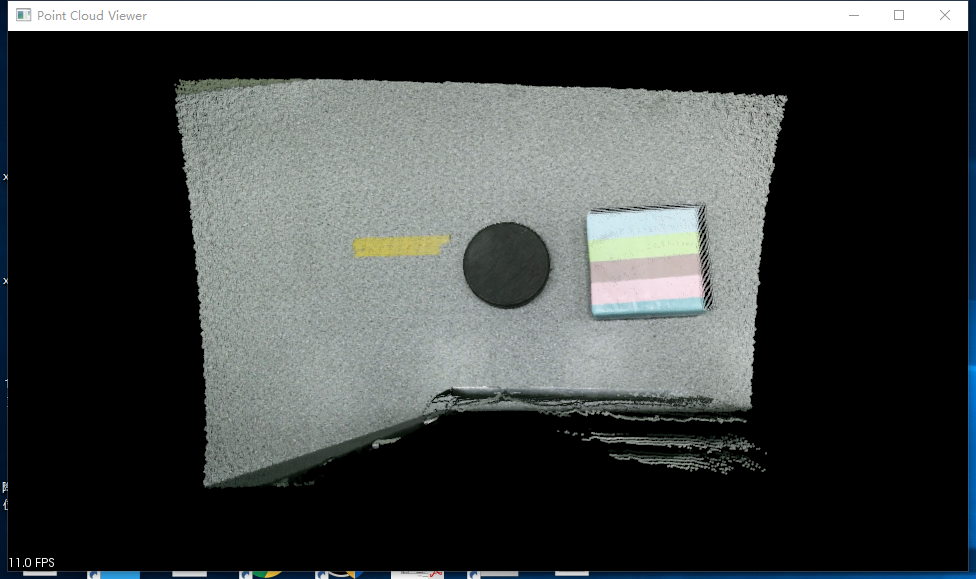
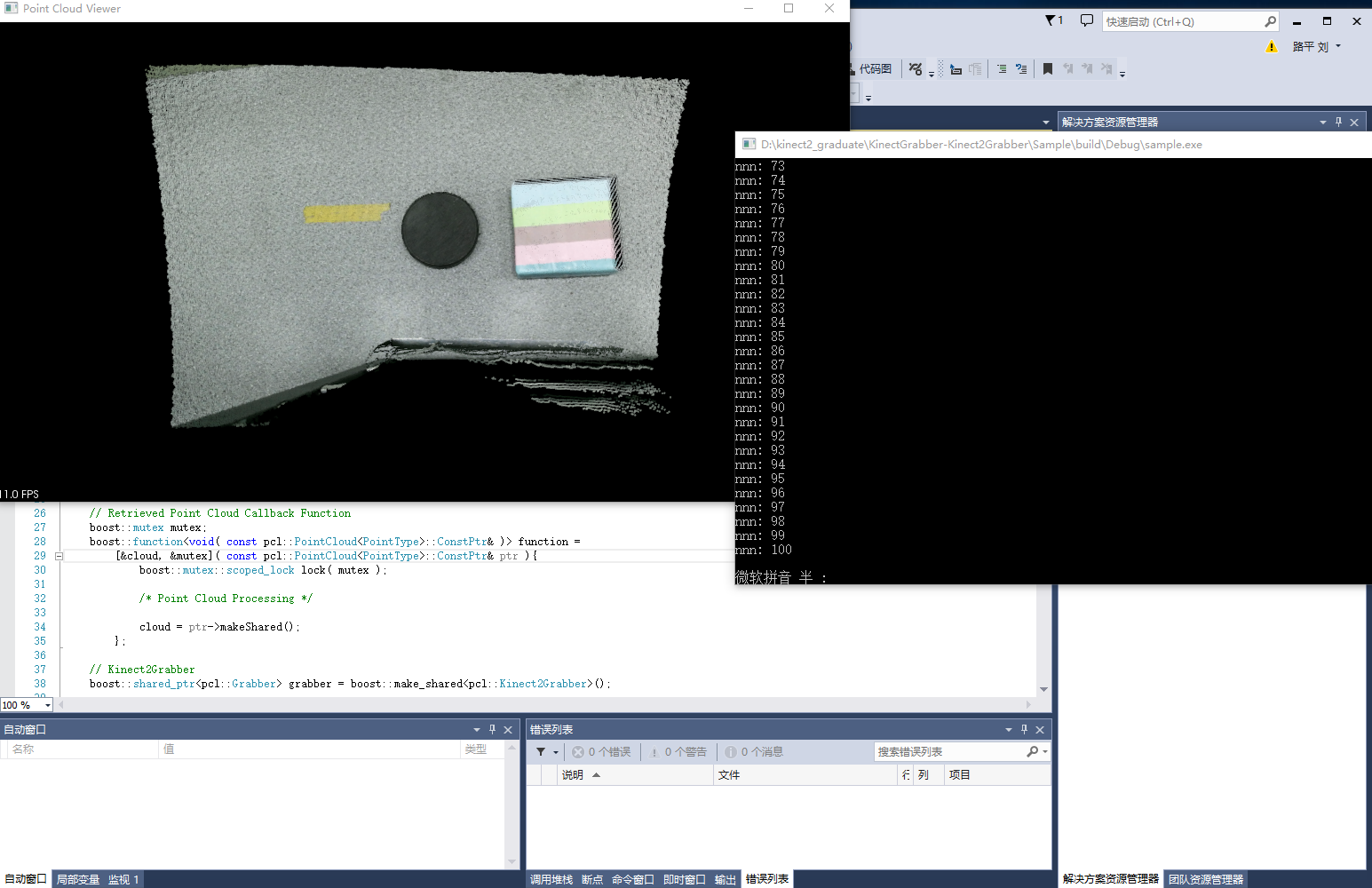
本实验是利用Kinect V2、PCL1.8、vs2013实现获取点云并显示,并在第100次刷新时将获取点云保存为pcd点云文件。实验开发所用的是Window10 操作系统,利用cmake配置项目,最后用vs2013打开,编译项目,运行程序。项目工程文件见:http://download.csdn.net/detail/cs2539263027/9891090,vs2013运行结果如下图所示:
项目配置过程如下:
1:从下载链接http://download.csdn.net/detail/cs2539263027/9891090下载项目文件
2:安装Kinect2.0sdk,并设置环境变量,教程参考:http://blog.csdn.net/hhu1506010220/article/details/53223732
3:安装PCL1.8,并设置环境变量,在此有两种方法:第一种VS2013的PCL1.8自编译,配置按照http://blog.csdn.net/yzheately/article/details/50938322,http://www.lai18.com/content/2483374.html,http://www.07net01.com/linux/2016/04/1460283.html;第二种采用PCL1.8官网一键安装包pcl 1.8.0 all-in-one installer,具体可以参考http://blog.csdn.net/u014283958/article/details/52599457,进行配置。
4:安装cmake,参考http://jingyan.baidu.com/article/acf728fd50de96f8e510a3f2.html
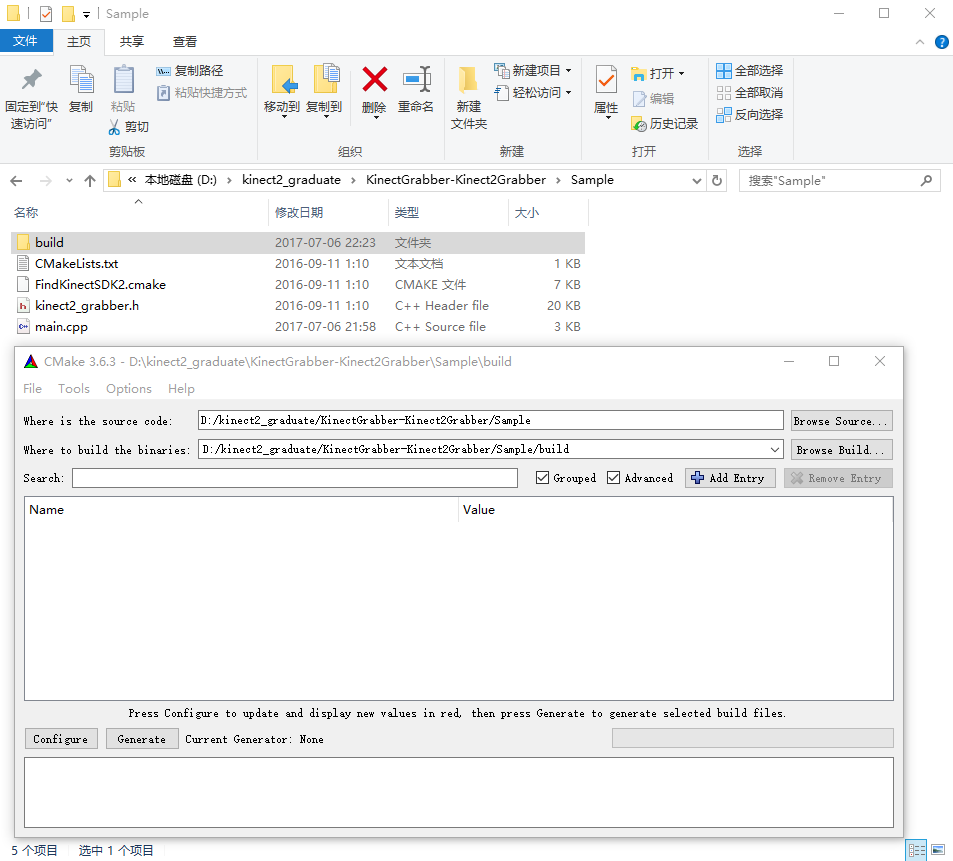
5:进入\KinectGrabber-Kinect2Grabber\Sample目录下,删除build下所有文件,打开camke
6:设置源目录和vs2013编译工程目录,如图所示:
7:点击configure,配置所使用的vs,如图所示:
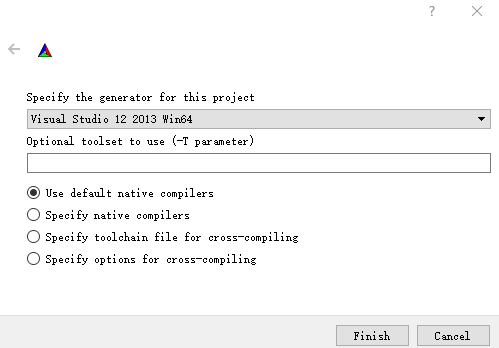
8:点击finish,然后点击cmake中的configure,如图所示:
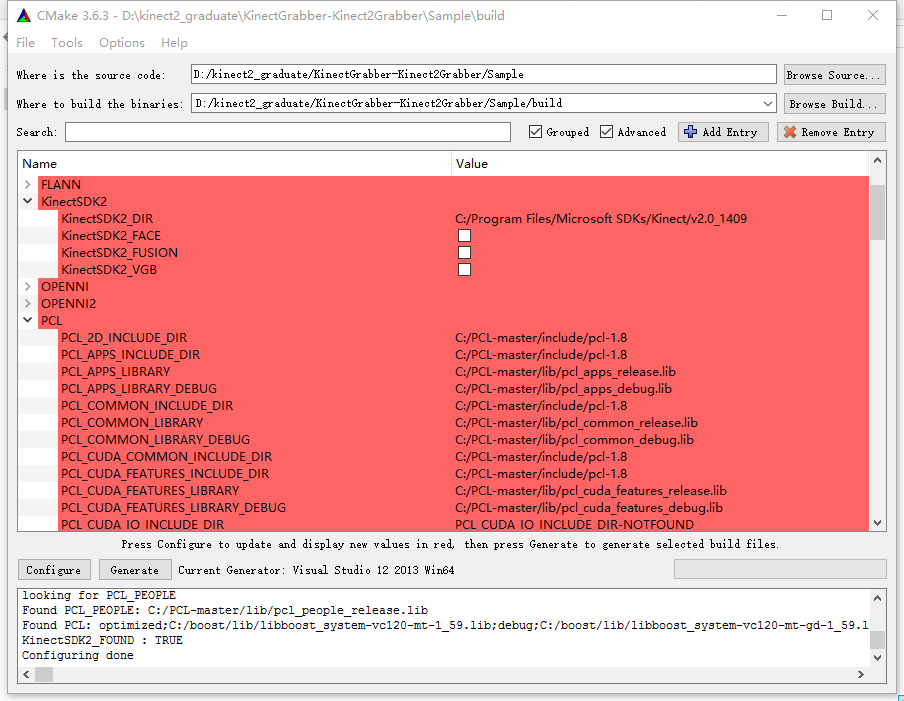
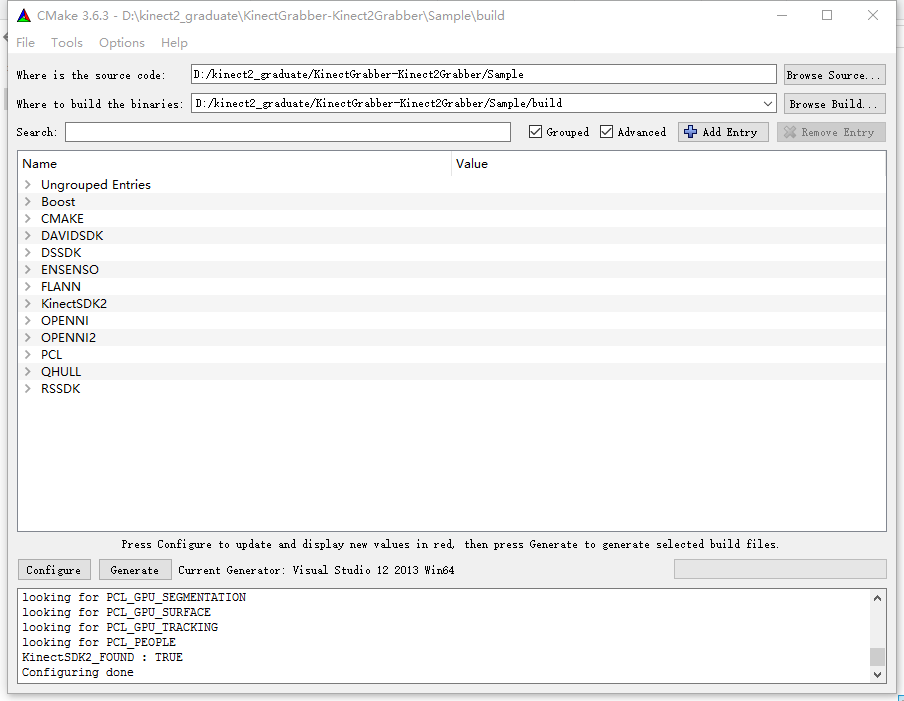
9:查看pcl、boost、kinect2sdk路径是否正确,如果不正确,说明之前关于pcl,kinect的安装不正确,配置完成后再次点击configure,红色条目消失,如图所示:
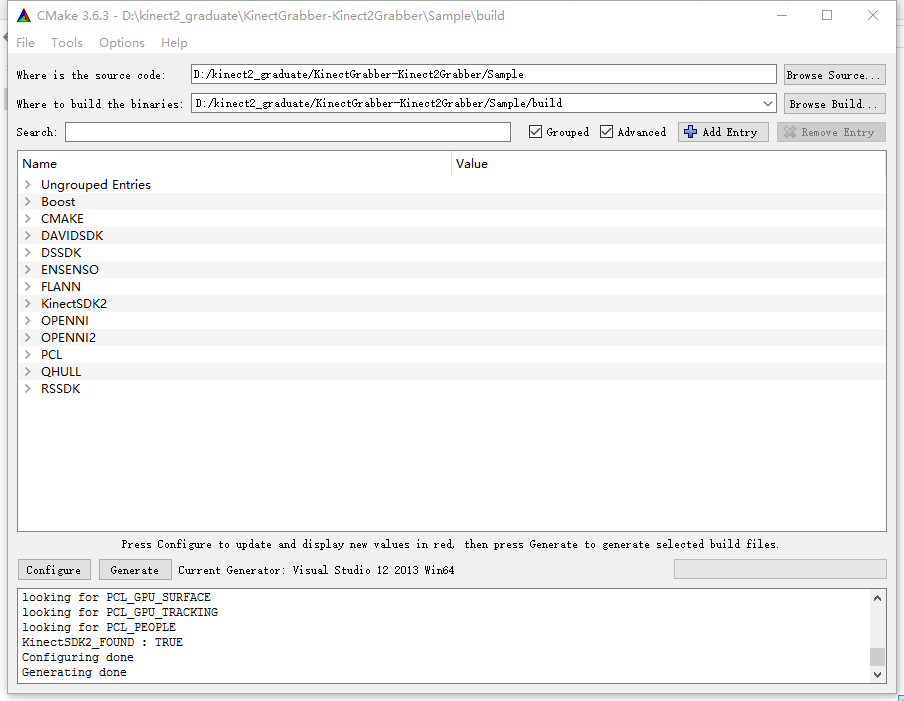
10:点击generate,然后就会在build目录里面生成vs对应工程文件,如图所示:
11:关闭cmake,在build目录种用vs2013打开sln工程文件,编译运行,命令窗口会不断计数,计数到100时停止,点云显示结果和命令窗口如图所示:
12:随便在命令窗口输入一个数字,将会将获取的点云保存成点云文件,程序结束。
有其它问题或改进建议,请联系qq:2539263027
















 171
171

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











