








本文的原文连接是: http://blog.csdn.net/freewebsys/article/details/48130895 未经博主允许不得转载。
1,gui
ROS,有许多模拟器,可以展示机器人,因为机器人设备其实都是非常昂贵的。要是真机调试比较不太现实。
所以使用模拟器可以很方便的进行开发调试,就像是android刚开始的时候,android G1 当时非常贵,买不起可以用模拟器嘛。
机器人现在也非常贵。但是随着硬件的发展,成本下降,以后会有能买的起的机器人,不过现在就使用模拟器开发就可以了。
2,关于xface
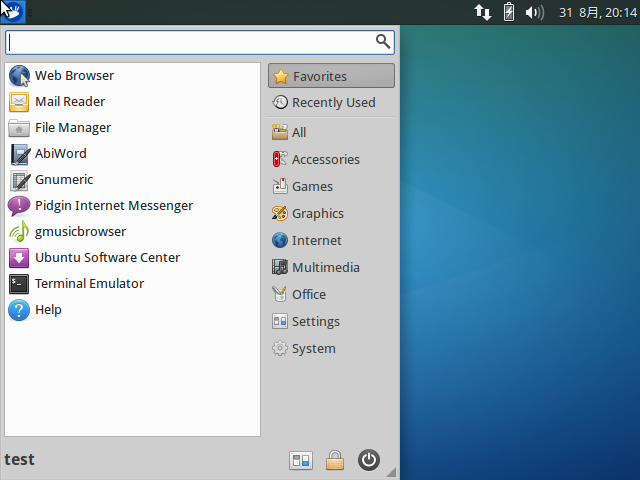
Xface是一个快速轻量级的桌面,Xubuntu 就是一个Ubuntu的一个使用Xface桌面的版本。
实在是太讨厌Gnome3的桌面了。觉得非常不好。本来想装gnome2,但是想了下也是个主题而已,gnome感觉上太花哨了,变得费资源了,不舒服了。
下载地址:
http://xubuntu.org/getxubuntu/
cd 下载地址,明显比gnome小点。
http://mirror.yandex.ru/ubuntu-cdimage/xubuntu/releases/14.04/release/
3,安装xface
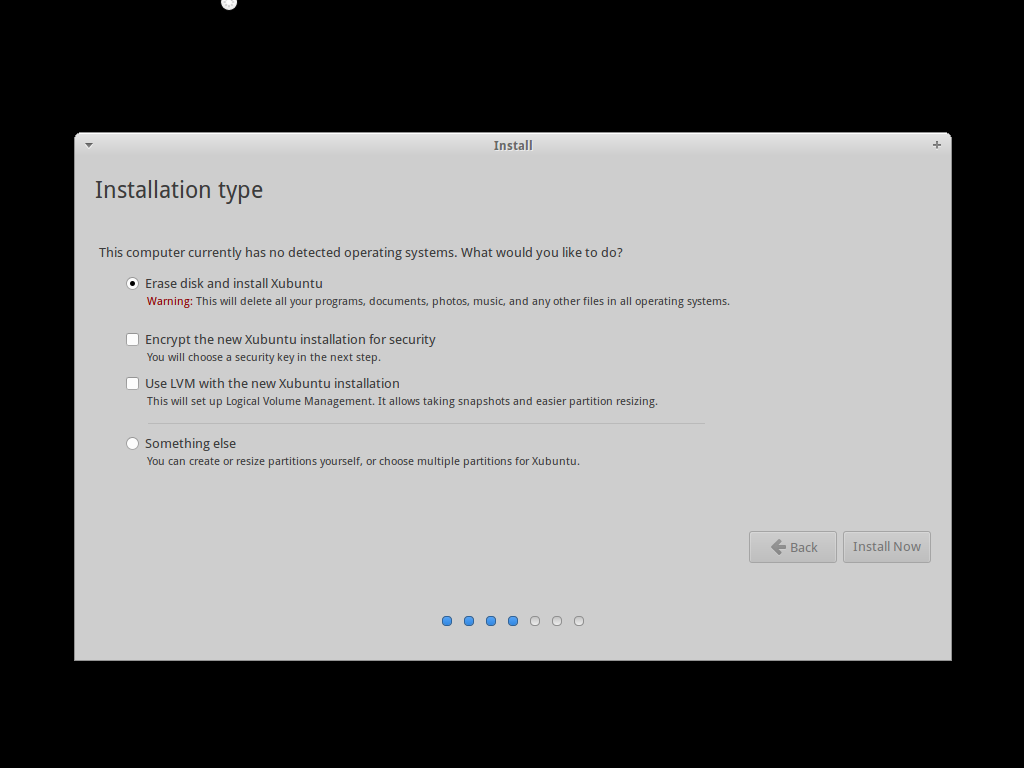

安装成功进入系统:
点击“设备” => “安装增强功能”
sh ./VBoxLinuxAdditions-x86.run
更多参考:http://www.2cto.com/os/201308/233609.html
#安装ssh服务,并启动
sudo apt-get install openssh-server openssh-client
#启动
sudo /etc/init.d/ssh start4,安装ROS
配置源:
deb http://mirrors.163.com/ubuntu/ trusty main restricted universe multiverse
deb http://mirrors.163.com/ubuntu/ trusty-security main restricted universe multiverse
deb http://mirrors.163.com/ubuntu/ trusty-updates main restricted universe multiverse
deb http://mirrors.163.com/ubuntu/ trusty-proposed main restricted universe multiverse
deb http://mirrors.163.com/ubuntu/ trusty-backports main restricted universe multiverse
deb-src http://mirrors.163.com/ubuntu/ trusty main restricted universe multiverse
deb-src http://mirrors.163.com/ubuntu/ trusty-security main restricted universe multiverse
deb-src http://mirrors.163.com/ubuntu/ trusty-updates main restricted universe multiverse
deb-src http://mirrors.163.com/ubuntu/ trusty-proposed main restricted universe multiverse
deb-src http://mirrors.163.com/ubuntu/ trusty-backports main restricted universe multiverse试验下源,安装编译工具:
sudo apt-get update
sudo apt-get install build-essential安装ros 参考:
http://wiki.ros.org/jade/Installation/Ubuntu
#配置source.list源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
#设置keys
sudo apt-key adv --keyserver hkp://pool.sks-keyservers.net --recv-key 0xB01FA116
#更新
sudo apt-get update
#安装全部桌面环境,包括gui工具。
sudo apt-get install ros-jade-desktop-full使用中国镜像:
http://wiki.ros.org/ROS/Installation/UbuntuMirrors
配置环境变量:
vi /etc/profile
#将命令放到,开机启动。
source /opt/ros/jade/setup.sh启动ROS:
roscore4,启动gui 小海龟demo
启动ROS:
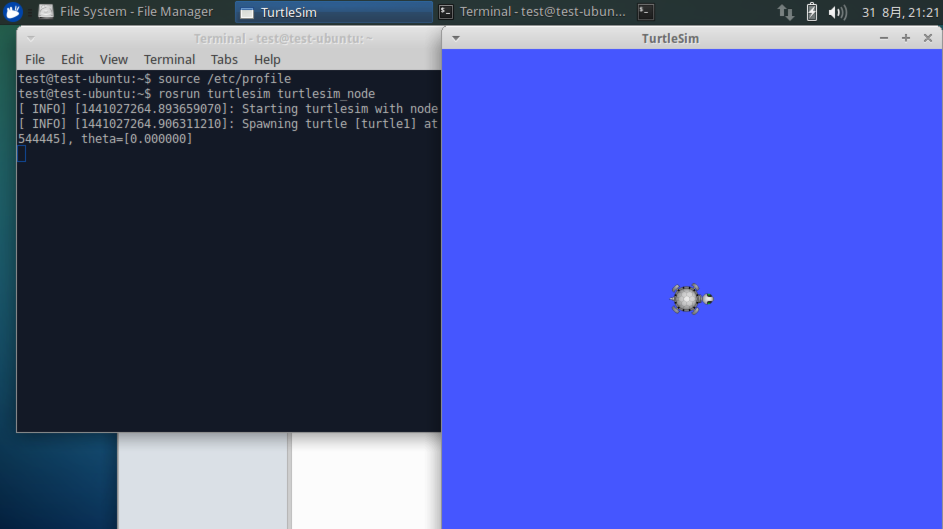
roscore启动小海龟
rosrun turtlesim turtlesim_node启动小海龟了。
查看节点信息
$ rosnode list
/rosout
/turtlesim
$ rosnode info turtlesim
--------------------------------------------------------------------------------
Node [/turtlesim]
Publications:
* /turtle1/color_sensor [turtlesim/Color]
* /rosout [rosgraph_msgs/Log]
* /turtle1/pose [turtlesim/Pose]
Subscriptions:
* /turtle1/cmd_vel [unknown type]
Services:
* /turtle1/teleport_absolute
* /turtlesim/get_loggers
* /turtlesim/set_logger_level
* /reset
* /spawn
* /clear
* /turtle1/set_pen
* /turtle1/teleport_relative
* /kill
contacting node http://test-ubuntu:49155/ ...
Pid: 26452
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound
* transport: TCPROS
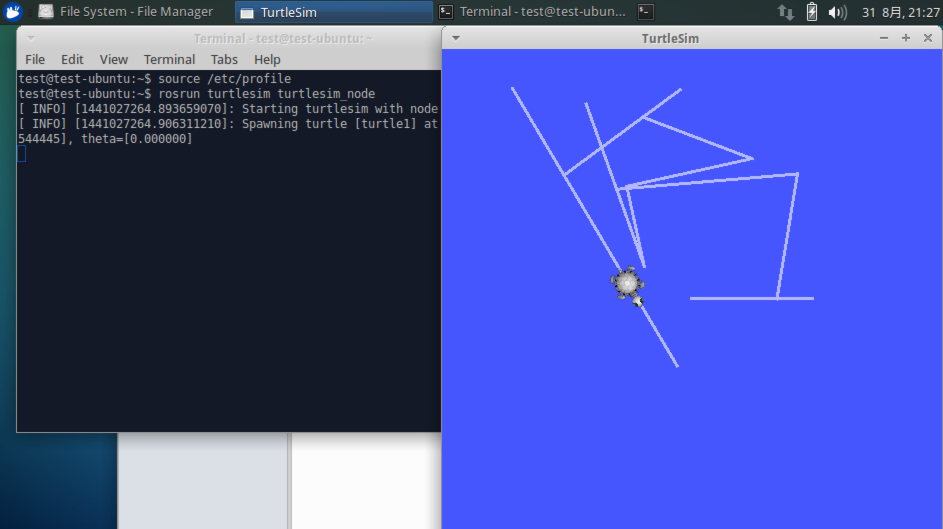
控制小海龟移动
$ rosrun turtlesim turtle_teleop_key
Reading from keyboard
---------------------------
Use arrow keys to move the turtle.注意是在这个console 按键盘,上下左右控制小海龟。
参考:http://wiki.ros.org/ROS/Tutorials/UnderstandingNodes
5,总结
本文的原文连接是: http://blog.csdn.net/freewebsys/article/details/48130895 未经博主允许不得转载。
ROS的精髓就是通信,底层封装的各种设备进行消息通信。
控制小海龟显示的是一个服务,控制移动的是另外一个服务。
两个服务通过消息进行通信进行控制。
每个服务都暴露自己的接口。只要开发应用就好了。底层的控制都封装了,可以很快的模块开发,提高开发效率。
同时因为开源项目,可以有很多资料学习,其实学习成本不高。















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









